
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
891 - 900 / 7,349
報知システム
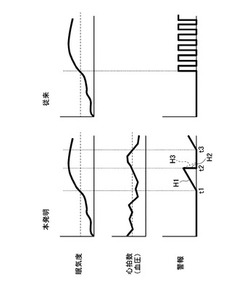
【課題】運転者の眠気が検知されたら警報を出力するシステムにおいて、運転者の覚醒努力が増加したら迅速に警報を低減あるいは停止する機能を備えた報知システムを提供する。
【解決手段】画像解析によって算出された眠気度と、心拍数(、血圧)との2つの情報を用いて、眠気があり覚醒努力がないと示しているときに、警報を出力し始める(時刻t1)。そして警報出力中も、より短い周期で心拍数(、血圧)の算出は行い続け、心拍数(、血圧)が閾値を上回って覚醒努力が増加したとみなされたら(時刻t2)、警報を低減する(点線H3)、あるいは停止する(実線H2)。したがって運転者が努力して眠気を低減させたら、そのことをただちに警報に反映させるので、運転者は不快感を感じる可能性が小さい。
(もっと読む)
制動装置

【課題】運転者に違和感を与えることがなく、またペダル踏み間違いやシフトレバーの入力ミス等による運転者の意思に反した車両挙動を高精度に検出するとともに、最適なタイミングで最適な制動力を付与できる制動装置を提供する。
【解決手段】走行状態判定部が前進位置を判定するとともに、アクセルペダルの踏み込み速度が第1速度閾値Vf以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに所定制動力で車両を制動し、走行状態判定部が後退位置を判定するとともに、アクセルペダルの踏み込み速度が第2速度閾値Vb以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに、所定制動力で車両を制動することを特徴とする。
(もっと読む)
車載カメラシステム
【課題】車両に搭載されたカメラを有効に利用する。
【解決手段】通常撮影モードにおいては、ユーザは、ステアリングスイッチ17やハプティックデバイス18を操作することにより、カメラ24の向きを車内及び車外の任意の撮影方向にして、画像を撮影することができる。これに対し、記録制御部3が車両に搭載された各種制御ユニットの車両信号を監視し、特定信号を検知したときには、カメラ24により車外周辺を撮影しその画像データを記憶するドライブレコーダモードに強制的に切替えられる。
(もっと読む)
運転支援制御装置
【課題】舵角センサやヨーレートセンサを用いることなく車両の操舵を検出して運転支援制御を行なう。
【解決手段】車載カメラ2により走行路を含む車両周辺を撮影し、車線区分線検出部31により車載カメラ2の撮影画像中の車線区分線の画像部分を抽出し、操舵検出部34により、車線区分線の画像部分の乱れの度合から、舵角センサやヨーレートセンサを用いることなく、車両1の操舵を検出する。
(もっと読む)
危険度算出装置及び危険度算出方法
【課題】精度の高い危険度算出を行うことができる危険度算出装置を提供する。
【解決手段】本発明に係る危険度算出装置1においては、自車両の運転者にとって死角になる領域を検出する死角領域検出手段21と、死角領域検出手段21により検出された死角を構成する死角構成物の情報を認識する死角構成物認識手段22と、死角構成物の情報に基づいて死角構成物が形成する死角領域から移動物体が飛び出す危険度を設定する危険度設定手段24と、を備える。
(もっと読む)
注意状態判別システム、方法、コンピュータプログラムおよび注意状態判別装置
【課題】眼球停留関連電位(EFRP)の解析区間を短縮し、状況変化が多い場合でも十分な精度でユーザの注意状態を判別する。
【解決手段】注意状態判別システム1は、脳波信号を計測する脳波計測部20と、眼球の運動を計測する眼球運動計測部30と、眼球の運動を用いて、眼球のサッケードが終了した時刻である眼球停留開始時刻およびサッケードの移動量を複数検出するサッケード検出部40と、各サッケードの移動量に基づいて各サッケードの方向を特定し、特定された各サッケードの方向を分類する分類部であって、分類された方向ごとに、各サッケードに対応する眼球停留開始時刻を起点として脳波信号から切り出した眼球停留電位を加算平均する分類部60と、加算平均された眼球停留関連電位に基づいて、分類された方向ごとの注意状態を判別する注意量判別部70と、方向ごとの注意状態の判別結果を用いて、注意状態を判別する統合判定部80とを備えている。
(もっと読む)
被追突防止装置
【課題】後続車両の運転者に対して不要な煩わしさを感じさせず、後続車両による自車両への追突を未然に防ぐことができる被追突防止装置、およびその方法を提供する。
【解決手段】後続車両による自車両への追突を防止する被追突防止装置であって、上記自車両が上記後続車両に追突される可能性を判定する被追突可能性判定手段と、上記自車両の運転者が減速操作を行う可能性を判定する減速操作可能性判定手段と、上記被追突可能性判定手段によって判定された追突可能性に基いて、後続車両の運転者に注意喚起を行う注意喚起手段とを備え、上記注意喚起手段は、上記減速操作可能性判定手段によって、上記自車両の運転者が減速操作を行う可能性が高いと判定された場合には、上記自車両の運転者が減速操作を行う可能性が低いと判定された場合よりも早いタイミングで注意喚起を行う。
(もっと読む)
運転支援装置
【課題】車両の右左折の開始を早期に検出することができ、運転支援サービスが遅れないようにすることができる運転支援装置を実現する。
【解決手段】自車両と他車両とが衝突する可能性があるか否かを判定する衝突可能性判定手段16と、前記衝突可能性判定手段により自車両と他車両とが衝突する可能性があると判定された場合に自車両の運転者に報知する情報提供手段14とを備える運転支援装置10において、自車両の加速度を検出する加速度検出手段31を備え、前記衝突可能性判定手段は、前記加速度検出手段により検出された加速度に基づいて自車両の右左折開始を検出し、この右左折開始情報に基づいて自車両と他車両とが衝突する可能性があるか否かを判定する。
(もっと読む)
車両周辺の画像を用いた運転支援装置
【課題】運転者が車両周辺の状況を把握しやすい運転支援装置を提供する。
【解決手段】運転支援装置10は、運転支援装置ECU11と、撮像装置12と、障害物検知装置13と、表示装置18と、警告手段19と、を備える。運転支援装置ECU11は、撮像装置12によって撮像された周辺画像31と、運転を支援するガイド画像32aとを取得する。運転支援装置ECU11は、障害物検知装置13が障害物33を検知した場合、ガイド画像32aを表示装置18に表示せずに周辺画像31を表示するとともに、障害物33が検知されたことを警告手段19によって運転者に知らせる。障害物検知装置13が障害物33を検知しない場合、ガイド画像32aと周辺画像31とを表示装置18に重畳表示させる。
(もっと読む)
障害物認識装置及び障害物認識方法
【課題】高い精度で障害物を認識することができる障害物認識装置を提供する。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
(もっと読む)
891 - 900 / 7,349
[ Back to top ]