
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
901 - 910 / 7,349
注意状態判別システム、方法、コンピュータプログラムおよび注意状態判別装置
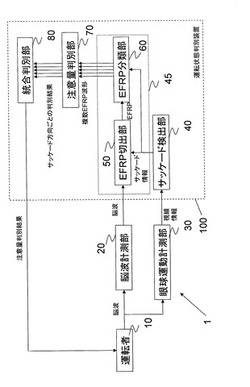
【課題】眼球停留関連電位(EFRP)の解析区間を短縮し、状況変化が多い場合でも十分な精度でユーザの注意状態を判別する。
【解決手段】注意状態判別システム1は、脳波信号を計測する脳波計測部20と、眼球の運動を計測する眼球運動計測部30と、眼球の運動を用いて、眼球のサッケードが終了した時刻である眼球停留開始時刻およびサッケードの移動量を複数検出するサッケード検出部40と、各サッケードの移動量に基づいて各サッケードの方向を特定し、特定された各サッケードの方向を分類する分類部であって、分類された方向ごとに、各サッケードに対応する眼球停留開始時刻を起点として脳波信号から切り出した眼球停留電位を加算平均する分類部60と、加算平均された眼球停留関連電位に基づいて、分類された方向ごとの注意状態を判別する注意量判別部70と、方向ごとの注意状態の判別結果を用いて、注意状態を判別する統合判定部80とを備えている。
(もっと読む)
被追突防止装置

【課題】後続車両の運転者に対して不要な煩わしさを感じさせず、後続車両による自車両への追突を未然に防ぐことができる被追突防止装置、およびその方法を提供する。
【解決手段】後続車両による自車両への追突を防止する被追突防止装置であって、上記自車両が上記後続車両に追突される可能性を判定する被追突可能性判定手段と、上記自車両の運転者が減速操作を行う可能性を判定する減速操作可能性判定手段と、上記被追突可能性判定手段によって判定された追突可能性に基いて、後続車両の運転者に注意喚起を行う注意喚起手段とを備え、上記注意喚起手段は、上記減速操作可能性判定手段によって、上記自車両の運転者が減速操作を行う可能性が高いと判定された場合には、上記自車両の運転者が減速操作を行う可能性が低いと判定された場合よりも早いタイミングで注意喚起を行う。
(もっと読む)
運転支援装置
【課題】車両の右左折の開始を早期に検出することができ、運転支援サービスが遅れないようにすることができる運転支援装置を実現する。
【解決手段】自車両と他車両とが衝突する可能性があるか否かを判定する衝突可能性判定手段16と、前記衝突可能性判定手段により自車両と他車両とが衝突する可能性があると判定された場合に自車両の運転者に報知する情報提供手段14とを備える運転支援装置10において、自車両の加速度を検出する加速度検出手段31を備え、前記衝突可能性判定手段は、前記加速度検出手段により検出された加速度に基づいて自車両の右左折開始を検出し、この右左折開始情報に基づいて自車両と他車両とが衝突する可能性があるか否かを判定する。
(もっと読む)
車両周辺の画像を用いた運転支援装置
【課題】運転者が車両周辺の状況を把握しやすい運転支援装置を提供する。
【解決手段】運転支援装置10は、運転支援装置ECU11と、撮像装置12と、障害物検知装置13と、表示装置18と、警告手段19と、を備える。運転支援装置ECU11は、撮像装置12によって撮像された周辺画像31と、運転を支援するガイド画像32aとを取得する。運転支援装置ECU11は、障害物検知装置13が障害物33を検知した場合、ガイド画像32aを表示装置18に表示せずに周辺画像31を表示するとともに、障害物33が検知されたことを警告手段19によって運転者に知らせる。障害物検知装置13が障害物33を検知しない場合、ガイド画像32aと周辺画像31とを表示装置18に重畳表示させる。
(もっと読む)
障害物認識装置及び障害物認識方法
【課題】高い精度で障害物を認識することができる障害物認識装置を提供する。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
(もっと読む)
自車の走行レーンを特定する方法
【課題】車載カメラによる従来の画像認識方式の場合のように道路環境の整備状況に依存することがない、まったく新しい方式で、実際の運転支援に有用な情報として活用できる自車走行レーン特定を行う。
【解決手段】自車の周辺の所定範囲内に存在する近隣車を検出する検出処理と、検出した近隣車の動きを分析し、近隣車の中から、自車の走行経路上から外れて並走する並走車を弁別する分析処理と、自車の右側にて並走車を弁別した際に自車走行レーンの右側に進行方向が同じ別のレーンが存在すると判断するとともに、自車の左側にて並走車を弁別した際に自車走行レーンの左側に進行方向が同じ別のレーンが存在すると判断する判断処理とを行う。
(もっと読む)
車両用運転支援装置
【課題】車両用運転支援装置において、乗員が快適と感じる車両の運転操作状態を精度良く判定する。
【解決手段】車両の躍度に関連する関連値を算出する躍度算出部10と、この躍度算出部10により算出された関連値に基づいて、車両の運転操作状態を判定する状態判定部11とを設ける。
(もっと読む)
運転支援装置
【課題】運転者の運転姿勢に応じた適切な運転支援を可能とする運転支援装置を提供することを目的とする。
【解決手段】運転支援装置1は、車両のシートベルトの引出し長さを検出するシートベルト長さ検出センサー43と、車両の周辺状況を監視し周辺状況に基づいて運転支援制御を行う制御部21と、を備え、制御部21は、シートベルト長さ検出センサー43で検出された引出長さに一時的な変動があった場合に、引出し長さに基づいて制御を変更することを特徴とする。
(もっと読む)
灯火誘導車載装置
【課題】夕方および夜間、トンネル内において、車両が無灯火で走行するときに、車両の搭乗者ならび運転者と周辺の車両に無灯火であることを察知させながら警戒するよう警報して、無灯火である状態から灯火するよう促し、運転事故を未然に防止する。
【解決手段】車両に感光センサーを搭載させ、暗さに応じて、無灯火で走行した場合に、搭乗者や運転者に警報音を発したり、周辺の車両に向けて無灯火車両がハザードランプを点滅して、無灯火であることを察知させ、警戒するよう警報する。
(もっと読む)
漫然状態判定装置
【課題】被験者が漫然状態であるか否かを判定する。
【解決手段】呼吸情報算出部10は、周期的に変化する被験者の呼吸状態から被験者の呼吸周期と呼吸深度とを繰り返して算出する。判定情報算出部11は、呼吸情報算出部10が算出した呼吸周期及び呼吸深度から周期安定指標値及び深度安定指標値をそれぞれ算出する。被験者が安定した呼吸状態を継続することによって、周期安定指標値が周期安定指標閾値未満になり、且つ深度安定指標値が深度安定指標閾値未満になると、漫然状態判定部12は、漫然状態判定条件の成立を前提として、被験者が漫然状態であると判定する。
(もっと読む)
901 - 910 / 7,349
[ Back to top ]