
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
911 - 920 / 7,349
自律走行制御装置及びそれを備えた自律走行車両
【課題】路面に基準線が描かれていない道路でも形状を認識し、更に、認識した道路形状を用いて適切な車両の走行経路を設定すること。
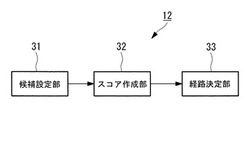
【解決手段】自律走行可能な車両に搭載され、該車両の自律走行を支援する自律走行制御装置であって、高低差が所定値以上の位置を検出し、検出した位置に基づいて道路形状を認識する道路形状認識部と、道路形状認識部によって認識された道路形状を用いて走行経路を設定する走行経路設定部12とを備え、走行経路設定部12は、道路形状認識部によって認識された道路の両端の間に複数の走行経路候補を設定する候補設定部31と、複数の走行経路候補の各々について、路面の凹凸、路面の斜度、経路の曲率、及び経路の曲率変化のうち、少なくともいずれか一つに基づいてスコアを作成するスコア作成部32と、スコア作成部32によって作成されたスコアに基づいて、複数の走行経路候補の一つを走行経路として特定する経路決定部33とを具備する自律走行制御装置を提供する。
(もっと読む)
映像解析方法およびシステム

【課題】歩行者を時系列的に撮像することにより、該歩行者を的確に分類する。
【解決手段】映像シーケンスの特徴を分類する方法は、前記映像シーケンスのフレームの、前記特徴を含んでいる対象領域を選択すること、前記対象領域を複数のセルに分割すること、前記セルによりオプティックフローのヒストグラムを計算すること、セル対についての前記オプティックフローのヒストグラムを比較すること、前記比較の結果の少なくとも一部に基づいて前記特徴をクラスに割り当てること、を含む。
(もっと読む)
通信システム及び路側無線通信装置
【課題】道路方向に沿った指向性を持つ指向性アンテナを使用しなくても干渉を回避できるようにする。
【解決手段】路側無線通信装置2が、車載無線通信装置3に対する情報送信を、当該路側無線通信装置に割り当てられた時間帯にて行う通信システムである。路側無線通信装置2は、第1道路Rと第2の道路R2とが交差する交差点J又はその近傍に設置された第1の水平面無指向性アンテナと、前記交差点J又はその近傍に設置された第2の水平面無指向性アンテナと、を備えている。第1道路R1に存在する車載無線通信装置3向けの第1情報が、第1の水平面無指向性アンテナ20Aから送信される。第2道路R2に存在する車載無線通信装置3向けの第2情報が、第2の水平面無指向性アンテナ20Bから送信される。さらに、第1情報と第2情報とは、異なる時間帯において送信される。
(もっと読む)
運転者注視方向連動の前方衝突危険警報システム、その方法及びそれを利用した車両
【課題】ナビゲーションと連動して交差点進入時に運転者が注視する方向の反対方向、即ち、運転者が注視できなかった方向の障害物を感知し、運転者の交差点進入を安全にする運転者注視方向連動の前方衝突危険警報システム、その方法及びそれを利用した車両を提供する。
【解決手段】 本発明は、運転者の注視方向を認識する運転者注視方向認識部と、運転者が注視しない方向の障害物を感知する障害物感知部と、交差点進入時に前記運転者注視方向認識部から運転者の顔面方向データを受信及び分析して前記運転者が注視する方向を把握し、前記障害物感知部へ前記運転者が注視する方向の反対方向に対する障害物の感知を要請し、障害物感知の結果を分析するエンジン制御ユニットとを含むことを特徴とする。
本発明によれば、交差点へ進入時、運転者に障害物の有無に従い警告することにより、運転者の不注意による交通事故を予め防止することができる効果がある。
(もっと読む)
運転支援装置
【課題】渋滞区間の交通流を改善する運転支援装置を提供することを課題とする。
【解決手段】渋滞区間における運転支援を行う運転支援装置であって、渋滞区間の平均速度を取得する平均速度取得手段と、平均速度取得手段で取得した渋滞区間の平均速度より高い速度を渋滞区間における上限速度として設定する上限速度設定手段と、上限速度設定手段で設定した渋滞区間における上限速度に基づいて運転支援(例えば、速度制御、情報提供)を行う運転支援手段とを備えることを特徴とし、渋滞区間において運転支援装置を搭載する車両が走行している割合を取得する走行割合取得手段を備え、上限速度設定手段は、走行割合取得手段で取得した走行割合に応じて上限速度を設定すると好適である。
(もっと読む)
車両の運転支援システム
【課題】本発明は、車両の運転支援システムにおいて、車両の周囲に存在する物体について有効な運転支援処理を行うことができる技術の提供にある。
【解決手段】本発明にかかる車両の運転支援システムは、車両の周囲に存在する物体が検出されたときに、物体を起点として道路と平行に延びる補助線を設定するとともに車両または物体の状態に応じて補助線の長さを変更し、道路と平行な方向における車両の位置が補助線の範囲に入ったときに運転支援処理を実行するようにした。
(もっと読む)
運転支援装置
【課題】運転者の運転姿勢に応じた適切な運転支援を可能とする運転支援装置を提供することを目的とする。
【解決手段】運転支援装置1は、車両のシートベルトの引出し長さを検出するシートベルト長さ検出センサー43と、車両の周辺状況を監視し周辺状況に基づいて運転支援制御を行う制御部21と、を備え、制御部21は、シートベルト長さ検出センサー43で検出された引出長さに一時的な変動があった場合に、引出し長さに基づいて制御を変更することを特徴とする。
(もっと読む)
灯火誘導車載装置
【課題】夕方および夜間、トンネル内において、車両が無灯火で走行するときに、車両の搭乗者ならび運転者と周辺の車両に無灯火であることを察知させながら警戒するよう警報して、無灯火である状態から灯火するよう促し、運転事故を未然に防止する。
【解決手段】車両に感光センサーを搭載させ、暗さに応じて、無灯火で走行した場合に、搭乗者や運転者に警報音を発したり、周辺の車両に向けて無灯火車両がハザードランプを点滅して、無灯火であることを察知させ、警戒するよう警報する。
(もっと読む)
漫然状態判定装置
【課題】被験者が漫然状態であるか否かを判定する。
【解決手段】呼吸情報算出部10は、周期的に変化する被験者の呼吸状態から被験者の呼吸周期と呼吸深度とを繰り返して算出する。判定情報算出部11は、呼吸情報算出部10が算出した呼吸周期及び呼吸深度から周期安定指標値及び深度安定指標値をそれぞれ算出する。被験者が安定した呼吸状態を継続することによって、周期安定指標値が周期安定指標閾値未満になり、且つ深度安定指標値が深度安定指標閾値未満になると、漫然状態判定部12は、漫然状態判定条件の成立を前提として、被験者が漫然状態であると判定する。
(もっと読む)
物体識別装置、並びに、これを備えた移動体制御装置及び情報提供装置
【課題】撮像領域内に存在する物体が置かれている環境が変化しても、その撮像画像中から適切にノイズ成分を除去することを課題とする。
【解決手段】偏光カメラ10の撮像データに基づくモノクロ輝度及び差分偏光度から路面状態判定部23が路面状態(乾燥状態か湿潤状態)を特定し、特定した路面状態に対応するノイズ除去用パラメータ(ε値)をパラメータ選択部25がパラメータ記憶部24から読み出し、ノイズ除去部26は、そのノイズ除去用パラメータ(ε値)を用いてノイズ除去処理を行う。
(もっと読む)
911 - 920 / 7,349
[ Back to top ]