
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
941 - 950 / 7,349
車両用運転支援装置
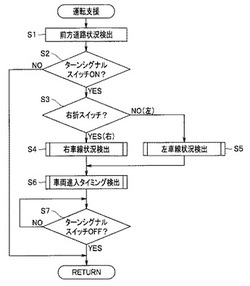
【課題】カーナビゲーション装置が搭載されていない車両であっても、合流車線から走行車線に進入する等の進路変更のタイミングを自動的に支援することができるようにする。
【解決手段】運転者がターンシグナルスイッチ5をONして進路変更の意思を示すと、進路変更したい側の車線を走行する車両を認識カメラ(1〜3)で撮像した画像に基づいて検出し、車両間の割込みスペースを算出し(S4,S5)、自車両Mの車速Sと割込みスペースの移動速度との速度差に基づいて自車両Mの進入開始時間Tstを求め、この進入開始時間Tstに達したとき、指示表示部22から進路変更の開始を知らせる音声ガイドを出力する(S6)。
(もっと読む)
車両走行制御装置

【課題】異なる駆動方式を持つそれぞれの車両に対して、駆動力源が要求する駆動力指令の対象が異なっても、駆動力指令の算出方法を変更することなく要求の対象となる駆動力指令を出力する車両走行制御装置を提供する。
【解決手段】予め算出された目標車速と、検出された実車速と、に基づいて目標加速度を算出する目標加速度演算部と、目標加速度から駆動力指令を算出し、算出された駆動力指令を出力する駆動力演算部と、を有し、駆動力演算部は、接続される駆動力源に応じて、予め定めた複数の変換比を用いて変換された、複数の駆動力指令のうち、少なくとも1つを出力する。
(もっと読む)
画像表示システム、画像処理装置、および、画像表示方法
【課題】車両列駐車の運転操作に応じてユーザが注意を払うべき箇所を明確にする技術を提供する。
【解決手段】車両及び車両の周辺領域を俯瞰した俯瞰画像を生成して、車両のステアリングホイールの操作内容を示す信号を入力する。車両を駐車する場合における操作内容に応答して、俯瞰画像中の車両の車体前方部を含む領域を拡大した前方拡大画像を表示する。これにより、駐車における車両位置に応じて車体のどの部分に注意を払って操作すればよいかをユーザは把握できる。
(もっと読む)
車線検知装置
【課題】太陽光の反射による白線部分と路面部分との輝度差の減少があっても、安定して白線を検出することのできる車線検知装置を提供することを目的とするものである。
【解決手段】撮像装置10から取得した撮像画像中の特定領域を画像処理して車線を検出する画像処理部20と、この画像処理部20の撮像画像中の路面反射状態を推定する路面反射推定部18と、この路面反射推定部18の推定結果に応じて画像処理部20の画像処理を制御する検出ウインドウ制御部19とを備え、この検出ウインドウ制御部19は、路面反射推定部18の推定結果から路面反射有りと判定した場合、画像処理部20に特定領域の位置を変更して画像処理させる。
(もっと読む)
速度制限装置
【課題】カーナビゲーションシステムを搭載していない車両であっても、自車走行路の制限速度を認識し、自車両の速度が制限速度を超えた場合、運転者に速度超過を知らせて制限速度内での運転を促すことができるようにする。
【解決手段】車速Sと前方認識カメラ1で撮像した画像に基づいて認識した速度標識31に表示されている制限速度Srを検出し、この車速Sと制限速度Srとの速度差ΔSを算出し(S13)、この速度差ΔSをパラメータとしてアクセル感度ゲインGaccを設定する(S14)。そして、このアクセル感度ゲインGaccでアクセル開度θaccを補正して疑似アクセル開度θahを求め、この疑似アクセル開度θahとエンジン回転数Neとに基づいて目標スロットル開度θeを設定する。
(もっと読む)
運転支援装置
【課題】走行環境をステレオ画像に基づいて認識する車両システムの認識状態をドライバが容易に把握できるようにする。
【解決手段】ステレオカメラユニットの制御コントローラに、認識状態評価部23aと評価結果表示制御部23bとを備える。認識状態評価部23aは、ステレオカメラの撮像画像から3次元の距離情報を算出する画像処理エンジン及び物体認識処理を行う認識コントローラからの出力に基づいて走行環境の認識感度や認識信頼性を評価する。認識状態評価部23aによる認識感度及び認識信頼性の評価結果は、評価結果表示制御部23bに送られ、所定フレーム数或いは所定時間毎に統計処理されて視覚情報に変換され、ディスプレイに出力される。これにより、ドライバは、車両システムによる走行環境の認識状態を容易に把握することができる。
(もっと読む)
車両用表示装置および車両用映像表示制御方法
【課題】狭路や狭い屈曲路を走行中に最も接触の危険性が高い車体部分を含んだ範囲の映像に自動的に切り替えて表示する車両用表示装置を提供する。
【解決手段】表示コントローラ11は、ナビゲーション装置13により取得した車両の現在位置周辺の道路地図情報、車両周囲センサ14により測定された車両周辺の障害物までの距離を用いて、狭路または屈曲路へ接近または進入したことを判別し、さらに、車両情報収集手段12により収集された車両情報を用いて、判別された狭路またはクランクにおける走行状況を識別し、車載カメラ15で撮影した車両周辺の映像の表示内容を指示する表示制御指令を出力することにより、カメラ映像切替装置16は、該表示制御指令の表示内容が指示する通り、仮想カメラの視点位置と視点方向と表示範囲とを変更した映像に切り替えて表示装置17へ表示する。
(もっと読む)
車線推定装置
【課題】二重白線等、走行車線の内外に、走行車線と誤認し易い車線候補点が断続的にプロットされた場合であっても、走行車線を連続して推定することができて、安定した運転支援を行うことができるようにする。
【解決手段】前回求めた走行車線の内側エッジを推定する仮想線に基づいて今回の予測標準線LpL,LpRを求め(S12)、この予測標準線LpL,LpRと車線境界をプロットする第1候補点P1の点列との一致度を求め(S13)、第1候補点P1が最も一致度が高いと判定した場合、この第1候補点P1の点列を今回の主候補点Pmの点列として設定する(S18)。そして、この主候補点Pmの点列に基づき曲線近似式(y=ax2+bx+c)から、今回の走行車線の内側エッジを推定する仮想線Lsを求める。
(もっと読む)
車両の運転支援装置
【課題】たとえ車両に大きなピッチング運動が生じて、制御対象を見失うような状況や、前方情報を大きく補正すべき状況が生じたとしても、可能な限り安定した精度で、レスポンス良く、前方の制御対象との衝突を回避する自動ブレーキ制御を安定して実行する。
【解決手段】ピッチング角θpが予め設定する閾値θpcより大きい場合は、少なくとも前回検出した制御対象の走行情報に基づいて制御対象と自車両1との衝突可能性を判定し、制御対象と自車両1との衝突可能性が有ることが判定された場合に自動ブレーキの介入による制動制御を行う。
(もっと読む)
歩行者検出装置
【課題】車両に搭載したカメラとして可視光領域の安価なカメラを用いることができる安価(低コスト)な構成により、横断歩道以外であっても歩行者を精度よく検出する。
【解決手段】変化領域初期検出部4により、車両1搭載したカメラ2の撮影画像に出現した画像個所を変化領域として初期検出し、検出窓設定部5、変化領域更新部6により、撮影画像の前記変化領域の周辺に複数の検出窓を初期設定し、各検出窓のいずれかに新たに出現した画像個所を変化領域として検出して更新し、その後に得られる撮影画像の更新した変化領域の周辺に各検出窓を設定することをくり返して歩行者特有の動きを検知し、可視光領域の安価なカメラを用いて横断歩道以外であっても歩行者を精度よく検出する。
(もっと読む)
941 - 950 / 7,349
[ Back to top ]