
国際特許分類[G08G3/00]の内容
国際特許分類[G08G3/00]の下位に属する分類
衝突防止システム (40)
国際特許分類[G08G3/00]に分類される特許
21 - 30 / 80
移動体表示装置
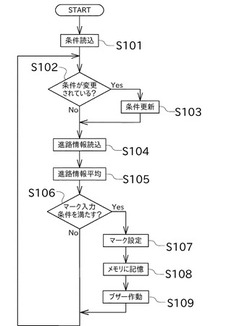
【課題】移動体の特定の挙動を検出することで、その挙動を示した位置を自動的に記憶することができる移動体表示装置を提供する。
【解決手段】移動体表示装置としてのプロッタ装置は、GPS受信機と、メモリと、CPUと、を備える。GPS受信機は、測位信号を取得して、当該自船の位置を算出する。また、GPS受信機は、測位信号に基づいて、自船の速度又は向きを算出する。メモリは、GPS受信機で算出した前記速度が所定時間内に所定の変化量以上変化したこと、又は、GPS受信機で算出した向きが所定時間内に所定角度以上変化したことを検出した場合に、前記変化が生じた位置を記憶する。CPUは、前記変化が生じた位置に対応するマークをディスプレイに表示するための処理を行う。
(もっと読む)
船舶の自動操舵装置および自動操舵プログラム

【課題】操船者が容易に船舶の航路を設定することができ、かつ、船舶が設定航路上を航行するよう確実に制御できる船舶の自動操舵装置および自動操舵プログラムを提供する。
【解決手段】操船者が自動操舵装置の表示部により、自動操舵に切り替えると、その時点における船舶の船首方位α1および船舶の位置β1を自動操舵装置の制御部が取込み、設定航路δおよび設定方位γを算出するS1,S2。以後は、各時点における船舶の船首方位α2と船舶の位置β2を随時取込みS3,S7、設定航路δと設定方位γとの方位偏差ε3を計算しS10、これに基づき舵を制御するための命令舵角ωを算出するS11。
(もっと読む)
自動操舵システム及び自動操舵装置
【課題】海の状況に素早く対応して船舶を適切な制御感度で制御する自動操舵システムを提供する。
【解決手段】自動操舵システム10は、GPSコンパス11と、GPSプロッタ12と、風向風速計13と、レーダ装置14と、舵角制御バルブ15と、自動操舵制御装置17と、を備える。自動操舵制御装置17は、GPSコンパス11が検出した船首方位と、GPSプロッタに入力された目的地の方位と、がなす角度を示す偏角を求める。そして自動操舵制御装置17は、この偏角に適用する補正係数を、風向風速計13が検出した現在地の風向及び風速と、レーダ装置14が取得した波の高さ及び波の向きであってGPSプロッタ12が設定した進行予定ルート上の波の高さ及び波の向きと、に基づいて求める。その後、自動操舵制御装置17は、この補正係数を偏角に適用して得られた指示舵角を用いて舵角制御バルブ15を制御することで船舶の進行方向を変化させる。
(もっと読む)
航法装置
【課題】自船位置の地点または他の地点を含む航行関連情報の画像を合理的に表示し得るようにした航法装置を提供する。
【解決手段】 自船位置の位置値を取り込んで記憶した記憶内容にもとづいて自船の航跡を表示する航跡表示手段と、自船速度が、所定値に達しているときは所定の時間間隔ごとに取り込んで記憶を行い、所定値に満たないときは所定の距離間隔ごとに取り込んで記憶を行う取込記憶手段とを具備している。
(もっと読む)
航法装置
【課題】 自船位置の地点または他の地点を含む航行関連情報の画像を合理的に表示し得るようにした航法装置を提供する。
【解決手段】 各航行関連情報に付随する各所定の地点を大略的に識別するための各所定の地点を囲む図形を表示するとともに、図形の中の各所定の地点の真の位置を指示するための図形を表示する地点識別図形表示手段を具備し、地点を囲む図形を円形または多角形による第1の図形とし、真の位置を指示するための図形を第1の図形よりも小さい点状または十文字状の第2の図形としたことを特徴としている。
(もっと読む)
航法装置
【課題】 自船位置の地点または他の地点を含む航行関連情報の画像を合理的に表示し得るようにした航法装置を提供する。
【解決手段】 各表示状態の表示を行う画面における任意の点を指定するために、画面の中を移動可能で任意の点を通るカーソルを表示するカーソル表示手段と、カーソルの移動中はカーソルを画面の横方向全体にわたる横線と画面の縦方向全体にわたる縦線とによる大形のカーソルにより表示し、カーソルの停止中はカーソルを任意の点の部分のみ指示する小形のカーソルにより表示する大小カーソル表示手段とを具備している。
(もっと読む)
バージ船押航遠隔監視システム
【課題】押船の位置情報、航海情報や固有情報の他に、周辺海上の波浪や風の画像情報、押航中のバージ船や積荷の画像情報をリアルタイムに把握可能なバージ船押航遠隔監視システムを提供する。
【解決手段】押船の操縦室以上の高さ位置に、バージ船やその周辺海上を撮像するカメラを据え付けるとともに、押船に船舶自動識別システムを搭載するようにしたので、押船の位置情報、航海情報や固有情報の他に、周辺海上の波浪や風の画像情報、押航中のバージ船や積荷の画像情報をリアルタイムに把握することができる。
(もっと読む)
運航支援装置及び運航支援システム
【課題】船舶等の安全性を含めた最適な航路を効率よく探索する運航支援装置等を得る。
【解決手段】出発地点から目的地点までの海域を格子状に任意の間隔に区切った交差部分を複数のノードとして設定し、海気象データと船舶が固有に有する個船データとに基づいて、ノード間におけるコストに係るパラメータの予測値を算出してコスト予測データを生成するコストパラメータ生成手段21と、海気象データと個船データとに基づいて、ノード間における船舶安全に関するパラメータについて、算出した予測値又は海気象データの少なくとも一方に基づいて避航予測データを生成する避航支援パラメータ生成手段22と、避航予測データ及び安全航行に係る許容限界を示す閾値を表す閾値データに基づいて、出発地点から目的地点において、閾値データが示す範囲を満たすエッジを抽出し、コスト予測データに基づいて、エッジから目的地までの最適航路を探索する航路探索手段23とを備えるものである。
(もっと読む)
入出港管理システム、処理方法、入出港管理装置、プログラム、船舶、点滅制御回路、及び移動体識別システム
【課題】港における船舶の管理を容易に行い、かつ入出港管理システムの船舶への導入コストを低くする
【解決手段】船舶100は、船舶100のIDに基づいて右舷灯または左舷灯を点滅させる。また、各監視カメラ200−1〜200−3は、船舶100を含む映像を撮影する。さらに、入出港管理装置300は、各監視カメラ200−1〜200−3が撮影した映像から船舶100の右舷灯または左舷灯の点滅パターンを抽出し、船舶100のIDを検出する。
(もっと読む)
船舶用ナビゲーション方法および船舶用ナビゲーション装置
【目的】帰港地の天候が悪化する場合にも、安全に帰港できる時刻もしくは港を案内することができる「船舶用ナビゲーション方法および船舶用ナビゲーション装置」を提供することにある。
【構成】船舶が帰港すべき港の位置を記憶し、現在位置を算出し、該現在位置から該港の位置までの距離と所要時間を算出し、該港近辺の天候情報を取得し、該天候情報より該港近辺の天候の危険度を算出し、該危険度より該港近辺の天候が危険な状態になる危険時間帯があるか否か判断し、該危険時間帯がある場合には、該危険時間帯がある旨の警告をすると共に、安全に帰港できるよう制御する。
(もっと読む)
21 - 30 / 80
[ Back to top ]