
国際特許分類[G10F5/00]の内容
国際特許分類[G10F5/00]の下位に属する分類
アクション (44)
音曲の記録された胴,シート,ローラ,スプール,またはその類似物 (2)
国際特許分類[G10F5/00]に分類される特許
1 - 8 / 8
電動オルゴール
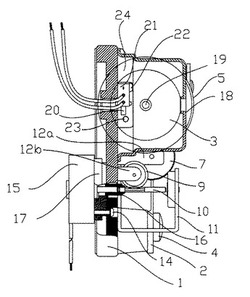
【課題】 外観は旧来のゼンマイ駆動オルゴールと変わることなく、機能的には電動オルゴールの優れた操作性を有するオルゴールを提供すること。
【解決手段】 香箱18の軸受穴19に支持されている回転ドラム体3により弾かれる弁を有する振動板2と、前記回転ドラム体3を減速歯車列25を介して駆動するモータ15と、前記回転ドラム体3の回転位置を検知して作動するスイッチ21と、前記香箱18、回転ドラム体3、振動板2、減速歯車列25、スイッチ21及びモータ15を支持するフレーム1とを有する電動オルゴールにおいて、前記モータ15を前記フレーム1の下部に配置し、前記スイッチ21を前記香箱18の内部に収納し、突起20をドラム歯車5に設置したピン23で作動させてオルゴールの演奏開始及び停止を制御する。
(もっと読む)
弦楽器演奏ロボット、及びその制御方法

【課題】簡便に異常を検知することができる弦楽器演奏ロボット、及びその制御方法を提供すること。
【解決手段】本発明の一態様に係る弦楽器演奏ロボットの制御方法は、演奏データにしたがって弦楽器を演奏する弦楽器演奏ロボットの制御方法であって、演奏データに基づいて弦を振動させ、弦の振動によって発生した音の音高を検出するステップS102と、演奏データに対応する音の音高と前記検出した音高との比較結果に応じて、異常を検知するステップS104と、を備えるものである。
(もっと読む)
自動演奏装置
【課題】簡単な構成で、同時制御操作子数の制約を受けることなく、多数の操作子をリアルタイムでフィードバック制御する。
【解決手段】シリアル接続された6つのASIC52がDSP51に接続される。各ASIC52は、検出信号SD、PWM値のパラレル入力、出力、及びPWM値、A/D値のシリアル転送を行える。DSP51は、演奏データとA/D値とに基づきPWM値を生成する。シリアルクロック信号SCKに同期して、96チャンネル分のシフトレジスタ54に、DSP51からPWM値がシリアル転送されると共に、シフトレジスタ54のA/D値がDSP51にシリアル転送される。一方、ワードシンク信号WSの立ち下がりタイミングで、シフトレジスタ54に検出信号SDがパラレル入力されると共に、シフトレジスタ54のPWM値がパラレル出力される。
(もっと読む)
楽器用励振装置
【課題】 楽器を励振するタイプの演奏装置であっても、テンポやピッチを自由に変えることができる楽器用励振装置を提供する。
【解決手段】 楽器用励振装置1のテンポ/ピッチ変更部14は、記憶部11から駆動波形自動演奏データD1を読み出す。このとき、テンポ指定部12またはピッチ指定部13によりテンポまたはピッチが指定された場合には、テンポ/ピッチ変更部14は指定された内容に応じて、波形に対して時間方向への伸縮演算(圧縮、伸長等)やタイムストレッチを行うことによって、テンポまたはピッチを変更し、変更した波形データを振動アクチュエータ駆動部16に供給する。一方、テンポ/ピッチ変更部17は、記憶部11から運指自動演奏データD2を読み出し、テンポ/ピッチ変更部17は指定された内容に応じてテンポまたはピッチを変更して、運指アクチュエータ駆動部18に変更したデータを供給する。
(もっと読む)
木管楽器演奏用アクチュエータおよび木管楽器演奏装置
【課題】 人間の演奏に極めて近い音色を得ることができる木管楽器演奏用アクチュエータおよび木管楽器演奏装置を提供する。
【解決手段】 人工口腔19内へ圧縮空気を加えられると、リード17は圧縮空気流による自励振動を行うから、本物の木管楽器の演奏状態に近い振舞いとなる。このとき同時に、リード17に貼付したピエゾ振動子23は励振信号に応じた振動をするが、ピエゾ振動子23は小型軽量で機械特性としては弱く形成されているので、リード17の自励振動を妨げることが少ない。しかも、ピエゾ振動子23は、管楽器の管共鳴周波数の影響を受け易いので、共鳴しない周波数については管から反射される音波によって振動が減衰し、一方、共鳴する周波数については管によって増幅される。このように、管の共鳴に対応した振動となるため、電気的な信号で駆動されるにも関わらず、リード17が自励発振している本物の管楽器の演奏状態に近い振舞いをする。
(もっと読む)
自動演奏装置
【課題】 ある楽器(特に、自然楽器)を自動的に演奏するとともに、その自動演奏に対して人の演奏操作の影響を加味させることができる自動演奏装置を提供する。
【解決手段】 演奏者がアンブシュア検出センサ11に唇4を着け、唇リードを形成させて息を吹き込むと、このときのアンブシュアと息圧が、それぞれアンブシュア検出センサ11および息圧センサ12によって検出される。息圧修正部16は、息圧自動演奏データに対して、検出した息圧情報を関与度r2に対応する量だけ加味して修正息圧信号を生成し、アンブシュア修正部14も同様にして修正アンブシュア信号を生成する。補助信号に応じて息圧アクチュエータ21とアンブシュアアクチュエータ18が駆動され、これにより、楽器演奏装置1は、演奏者の演奏行為を関与度に従って関与させた自動演奏をトランペット2に行わせることができる。
(もっと読む)
金管楽器演奏用アクチュエータおよび金管楽器演奏装置
【課題】 消費電力が少なく、人間のリップリードに極めて近い音色を得ることができる金管楽器演奏用アクチュエータおよび金管楽器演奏装置を提供する。
【解決手段】 加圧空気挿入口20から加圧空気を吹き込みながら、振動膜13a,13bを振動させると、振動膜13a,13bの境界部が加圧空気の圧力によってマウスピース側に撓み、隙間が生じる。また、振動膜13a,13bの境界部に振動による隙間も生じる。このようにして生じる間隙から加圧空気が管楽器内に挿入される。また、振動膜13a,13bにより発生した音波は、管楽器の先端の朝顔部で反射し、振動膜13a,13bまで戻ってくる。振動膜13a,13bが金管楽器の共鳴周波数に合う周波数で振動すると、この音波は反射波と共鳴して管内の音波の音圧を増幅してゆき、金管楽器らしい自然で大きな音量の発音をする。このように管楽器の共鳴を利用した発音が行われる。
(もっと読む)
演奏制御装置、楽器演奏ロボット、ロボットによる楽器演奏方法
【課題】接触位置の損傷による楽器の短命化を防止する。
【解決手段】ロボット6は、バチ先をドラム2の打撃面の垂直方向に移動させて演奏を行うとすると、指令分解部21は、入力されたバチ先の下死点位置を示す3次元の位置指令データを、水平方向成分と垂直方向成分とに分解する。ばらつき成分付加部22は、水平方向成分データにばらつき成分データを付加する。指令合成部23は、ばらつき成分が付加された水平方向成分データと、指令分解部21が分解した垂直方向成分データとを合成して位置指令データを生成する。演奏指令部24は、指令合成部23生成の位置指令データに従いマニピュレータ8へ動作指令信号を送出する。マニピュレータ8は、その指令信号に従いアーム10を下死点位置まで振り下ろすことで演奏を行うが、このとき打撃点はばらつき成分によりドラム2の打撃面上にばらつく。
(もっと読む)
1 - 8 / 8
[ Back to top ]