
国際特許分類[H01L21/68]の内容
電気 (1,674,590) | 基本的電気素子 (808,144) | 半導体装置,他に属さない電気的固体装置 (445,984) | 半導体装置または固体装置またはそれらの部品の製造または処理に特に適用される方法または装置 (183,847) | 製造または処理中の半導体または電気的固体装置の取扱いに特に適用される装置;半導体または電気的固体装置もしくは構成部品の製造または処理中のウエハの取扱いに特に適用される装置 (11,346) | 位置決め,方向決め,または整列のためのもの (1,768)
国際特許分類[H01L21/68]に分類される特許
1 - 10 / 1,768
露光装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
検出方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
アライメントマーク変形推定方法、基板位置予測方法、アライメントシステムおよびリソグラフィ装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
駆動システム及び駆動方法、並びに露光装置及び露光方法
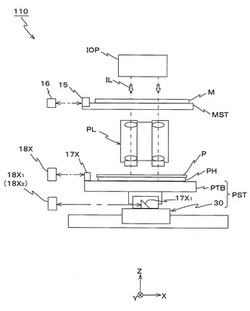
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
露光装置、露光装置ユニット及び被露光部材とマスクとのアライメント方法

【課題】被露光部材とマスクとのアライメントを行うための位置調整を単純化することによって効率的なアライメントを可能とする。
【解決手段】被露光部材20の位置を調整する被露光部材位置調整装置100と、被露光部材20に形成すべき所定のパターン象が描かれているマスク30の位置を調整するマスク位置調整装置200とを備える露光装置10であって、直交する2軸の一方の軸をX軸とし、他方の軸をY軸としたとき、被露光部材位置調整装置100は、被露光部材20をX軸及びY軸を含むXY平面上におけるX軸に沿った方向及びY軸に沿った方向に移動可能に構成され、マスク位置調整装置200は、マスク30をXY平面に直交するZ軸に沿った軸を中心に回転可能に構成されている。
(もっと読む)
部品位置認識方法および部品供給装置
【課題】ウエハの円周位置を簡易且つ確実に精度良く検出し、ウエハカット部品の位置を高精度に認識することができる部品供給装置および部品位置認識方法を提供すること。
【解決手段】移動装置71で識別部材93又はスポット照明装置80を移動しながら、カメラ39で識別部93a又はスポット光を含むウエハUの画像を取得するようにしている。これにより、識別部93a又はスポット光がウエハUの円周に達したときに識別部93a又はスポット光の一部が隠れるので、ウエハUの円周の位置を簡単且つ確実に検出できる。また、ウエハUの円周により部分的に隠された識別部93a又はスポット光の形状を認識することにより、ウエハUの円周位置をより精度良く検出でき、ウエハカット部品Pの位置を高精度に認識することができる。よって、従来の光センサは不要となり、部品供給装置20の低コスト化および小型化を図ることができる。
(もっと読む)
駆動システム及び駆動方法、並びに基板貼り合わせ装置及び基板貼り合わせ方法
【課題】2つのウエハを高精度で位置合わせする。
【解決手段】 基板貼り合わせ装置100において、第1及び第2テーブルT1,T2がそれぞれ保持するウエハW1,W2を張り合わせるために第1及び第2テーブルT1,T2を互いに接触した際に、X干渉計40X(第1計測器)が設置された第2テーブルT2(ステージ装置30)が示す共振モードに対して逆相の共振モードを示す第1テーブルT1(第1テーブル装置20)にX干渉計45X(第2計測器)が設置されている。これらの計測器を用いて1入力2出力系(SIMO系)のフィードバック制御系を構築することにより、第1及び第2テーブルT1,T2間の接触状態に拠らず、制御系を切り換えることなく、高帯域でロバストな第2テーブルT2(ステージ装置30)の駆動を制御する駆動システムを設計することが可能となる。
(もっと読む)
ステージおよびステージの製造方法
【課題】 載置される基板の加工または検査を高精度に行なう要求に応える。
【解決手段】 外側第1リニアガイド6aは、ステージベース5に接続された、第1方向に沿って直線状である外側第1レール11aと、外側第1レール11aに取り付けられ、外側第1レール11a上を第1方向に沿って移動可能であるとともに、第1テーブル7に接続された外側第1スライダ12aとを有する。内側第1リニアガイド12bは、ステージベース5に接続された、第1方向に沿って直線状である内側第1レール11bと、内側第1レール11bに取り付けられ、内側第1レール11b上を第1方向に沿って移動可能であるとともに、第1テーブル7に接続された内側第1スライダ12bとを有する。第2リニアガイド8の第2レール18の熱膨張率は、第1テーブル7の熱膨張率よりも大きい。内側第1スライダ12bの高さHbは、外側第1スライダ12aの高さHaよりも小さい。
(もっと読む)
部品供給装置および部品位置認識方法
【課題】ウエハの円周位置を簡易且つ確実に精度良く検出し、ウエハカット部品の位置を高精度に認識することができる部品供給装置および部品位置認識方法を提供すること。
【解決手段】部品供給装置20は、部品突上げ装置70の第2移動装置71に装着されたウエハ照明装置80で部品供給位置Aに搬送されたウエハUに対し下方から光を広角に照射し、部品装着装置30の第1移動装置31に取付けられたカメラ39でウエハUの円周の一部を撮像する。このため、画像にはウエハUの表面に形成された回路等は写り込まず、ウエハUは影として写ることになる。これにより、ウエハUの円周位置を簡易且つ確実に精度良く検出し、ウエハカット部品Pの位置を高精度に認識することができる。よって、従来の光センサは不要となり、部品供給装置20の低コスト化および小型化を図ることができる。
(もっと読む)
基板搬送装置の位置調整方法
【課題】調整治具を使用することなく搬送位置調整を行うことが可能な基板搬送装置の位置調整方法を提供する。
【解決手段】基板を搬送する基板搬送部により基板を保持し、基板の位置を検出する第1検出ステップと、基板搬送部により保持される基板を、基板を保持して回転する基板回転部へ搬送するステップと、基板回転部に保持される基板を、基板回転部により所定の角度だけ回転するステップと、基板回転部により回転された基板を、基板搬送部から受け取るステップと、基板搬送部が受け取った当該基板の位置を検出する第2検出ステップと、第1検出ステップで求めた基板の位置と、第2検出ステップで求めた基板の位置とに基づいて、基板回転部の回転中心位置を把握するステップと、把握された回転中心位置に基づいて、基板搬送部の位置を調整するステップとを含む基板搬送装置の位置調整方法が提供される。
(もっと読む)
1 - 10 / 1,768
[ Back to top ]