
国際特許分類[H02N2/00]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 他類に属しない電機 (5,474) | 圧電効果,電歪または磁歪を用いる電機一般 (2,953)
国際特許分類[H02N2/00]の下位に属する分類
直線運動を生じるもの,例.アクチュエータ;直線ポジショナ
回転運動を生じるもの,例.ロータリーモータ
機械的入力から電気的出力を生じるもの,例.発電機 (67)
国際特許分類[H02N2/00]に分類される特許
2,831 - 2,840 / 2,886
圧電アクチュエータおよび駆動装置

【課題】 ぶれ方向の共振周波数を高くすることを可能とした圧電アクチュエータおよび駆動装置を提供すること。
【解決手段】 本発明の圧電アクチュエータは、矩形の伸縮変位部および前記伸縮変位部の伸縮変位方向に連結された矩形の剪断変位部を備える圧電アクチュエータであって、伸縮変位方向の長さをH、剪断変位方向の長さをL、前記伸縮変位方向と前記剪断変位方向とに垂直な方向の長さをW、密度をρ、そしてヤング率をYとしたとき、前記H、L、W、ρ、そしてYが、H≦10mm、L/W≦2.5、ρ≦8×10−3kg/m3、かつ65GPa≦Y、なる関係式を満たす。
(もっと読む)
トルク制御機構付超音波モータ及び超音波モータ搭載ロボット

【課題】回転子に一端が接続されたワイヤを固定子の中空孔を挿通して張力を適宜調節可能に構成して超音波モータの予圧力を適宜調節するトルク制御機構付超音波モータ及び超音波モータ搭載ロボットの提供。
【解決手段】回転子2に一端が接続されてこの回転子2の回転中心Aを通り中空孔1aを挿通して固定子1を縦貫するワイヤ3と、固定子1中に圧電素子11,12,13,14とともに介層されて外表面中間に一体張出し外延した懸架フランジ15を鍔設した中空孔1aの下開口端B側で貫通垂下したワイヤ3下端に固着された張力調節手段5と、を具備させる特徴的構成手段の採用。
(もっと読む)
積層電気−機械エネルギー変換素子及び振動波駆動装置
【課題】 小型化且つ高出力化できると共にモ−タ効率を向上させることができる積層電気−機械エネルギー変換素子及び振動波駆動装置を提供する。
【解決手段】 振動波モータ50は、振動子52及び回転部53を備え、振動子52は、金属の弾性体54と、円形状圧電層1〜11から成る積層圧電素子55と、金属の弾性体57と、弾性体54と協働して積層圧電素子55及び弾性体57を挟持する金属の弾性体58とから成る。圧電層2〜11のうち偶数番目の層の圧電層の第1層側の面には、内部電極A+,B+,A−,B−が設けられ、一方、圧電層2〜11のうち奇数番目の層の圧電層の第1層側の面には、内部電AG+,BG+,AG−,BG−が設けられている。これらの内部電極は、積層圧電素子55の内部の発生すべき歪に応じて、圧電層7〜11までの内部電極に比べて、圧電層5,6の内部電極の外径は小さく、圧電層2〜4の内部電極は外径がさらに小さくなっている。
(もっと読む)
圧電超音波モーター
【課題】圧電超音波モーターの励起電圧の低下、機械的出力および信頼性の増加、モーター設計の単純化、製造コストの低減、およびモーターの構造的な取り扱いの改善を達成すること。
【解決手段】本発明は、長さLおよび高さHの圧電プレートの形の振動子、ならびに振動子に配置され、動かすべき部分の摩擦表面に対して弾性的に押し圧された1個または2個の摩擦要素を備える圧電超音波モーターに関する。本発明によれば、圧電プレートはより大きな表面に縦に展延する区画面によって2個の同一部分に分割され、これらの部分の少なくとも1個は非対称音響定在波の非対称的な発生器を含み、その起動によって非対称的な2次元定在波を発生するので、圧電プレートの長い端部面の中心に配置された摩擦要素は分割面に対して同一の傾きで運動を行い、動かすべき要素に運動エネルギーが伝達される。
(もっと読む)
微小電気機械装置
電気機械装置(201)は、第2及び第3の基板(220a〜b)の内面を、第1の基板(230)に取り付けることによって形成された支持構造(210)を備える。支持構造(210)は、第2の基板と第3の基板(220a〜b)との間に、少なくとも1つの空洞(250)を備える。圧電要素などの電気機械活性要素(260a〜b)が、第2又は第3の層(220a〜b)のうち少なくとも一方の外面上に設けられる。 (もっと読む)
電気的な機能ユニット及びその製造方法
本発明は電気的な機能ユニットと該機能ユニットを製造する方法とに関する。
本発明の電気的な機能ユニットは、
−相上下するセラミック層(2)の積層体から形成された部体(1)を有し、
−前記部体(1)が外からアプローチ可能な中空室(3)を有し、該中空室(3)の壁(8)に接触面(4)が配置されており、
−前記接触面(4)を接触させるための接触装置(5)を有し、該接触装置(5)が前記部体(1)の外部で接続可能であり、
−前記接触装置(5)が前記接触面(4)にばね力を作用させる接触ばね(53)を有している
ことを特徴としている。この機能ユニットは接触が内部から行なわれ、したがって所要スペースが小さいという利点を有している。 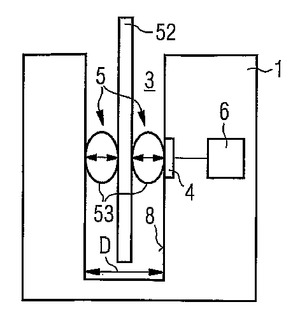 (もっと読む)
(もっと読む)
圧電装置、およびそれを駆動するための方法ならびに回路
駆動回路は、圧電アクチュエータを有する装置のための駆動信号を生成する。いくつかの例示的な実施例では、駆動回路は、装置のリアルタイム動作中、駆動信号(たとえば駆動信号の波形の形状)を動的に変化させる。同じまたは異なる他の例示的な実施例では、駆動回路は、駆動回路へのアナログ入力信号に従って駆動信号を発生させる。アナログ入力信号は、たとえば、圧電アクチュエータの共振の兆候、温度の兆候、粘度の兆候、および/または駆動信号の所望の電圧および所望の周波数のうちの1つの兆候であり得、もしくはそれらを有し得る。アナログ入力信号は、ユーザ入力装置から取得可能である。同じまたは異なる他の例示的な実施例では、駆動回路は、装置の動作パラメータに依存して駆動信号を発生させる。装置の動作パラメータは、たとえば、圧電アクチュエータの共振または流体の温度などの感知されたパラメータであり得る。同じまたは異なる他の例示的な実施例では、駆動回路は、センサから取得されたセンサ信号に依存して駆動信号の波形が形作られるよう、駆動信号を発生させる。センサは、装置の内部(たとえばポンプ室の内部)、装置の内部またはその近傍の他の場所、もしくは装置によってサービスを提供されるサービス対象装置の内部またはその近傍に位置していてもよい。駆動回路のための動作の方法、および駆動回路を利用し、その方法に従って動作する装置のための動作の方法も開示される。 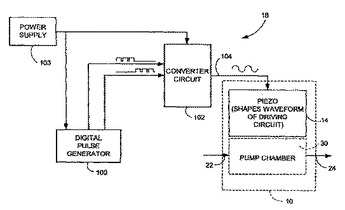 (もっと読む)
(もっと読む)
圧電装置、およびそれを駆動するための方法ならびに回路
駆動回路(18)は、圧電アクチュエータ(14)を有する装置(10)のために予め定められた波形形状の波形を有する駆動信号を生成する。駆動回路(14)は、駆動信号を生成する際に駆動回路によって利用される波形形状データを記憶するメモリ(140)を含む。駆動回路は、波形の周期を構成する複数のポイントの各々について、駆動信号が予め定められた波形形状にとって適切な振幅を有するように、波形形状データを利用する。波形形状データは、好ましくは、装置の1つ以上の動作パラメータを最適化するよう作成されたものである。好ましくは、波形形状データは波形方程式を解くことによって作成されており、波形方程式は、装置の少なくとも1つの動作パラメータを最適化するよう求められた係数を有する。波形方程式について求められた係数の数は、装置の帯域幅内にある波形の高調波の数に依存する。他の局面は、駆動回路を利用する装置、装置を動作させるための方法、駆動回路(たとえば圧電アクチュエータを有する装置のための駆動信号を生成する駆動回路)によって利用されるメモリ(212)、および最適化された波形形状データを発生させるための機器および方法に関与する。 (もっと読む)
圧電素子用の接点ピンを配置する方法並びにスリーブ及びアクチュエータユニット
燃料インジェクタに組み込まれるアクチュエータユニット(11)の製造時には、まず初めに圧電素子(8)がプラスチックスリーブ(1)内に導入される。圧電素子(8)のための外部からの電流供給のために、2つの接点ピン(5)が設けられていて、両接点ピンはプラスチックスリーブ(1)の外側で案内されている。接点ピン(5)のポジションを、特にプラスチックスリーブ(1)を備えた圧電素子(8)の注型前に固定するために、本発明によれば、接点ピン(5)のために、係止結合部として形成されたピン支承部(2)を設けることが提案される。係止結合部(2)はこの場合、該係止結合部が接点ピン(5)を、係止結合部への導入後にそのポジションにおいて固定するように、構成されている。特別の構成では、プラスチックスリーブ(1)が一体的な中空体として形成されており、このように構成されていると、組立てを特に簡単に実施することができる。 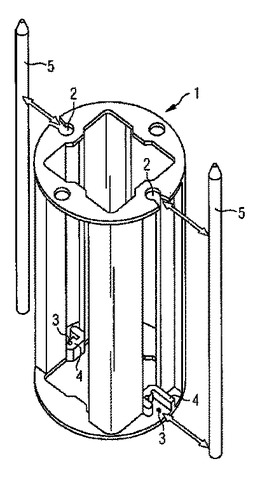 (もっと読む)
(もっと読む)
圧電アクチュエータ駆動装置、電子機器、その駆動方法、その駆動制御プログラム、そのプログラムを記録した記録媒体
制御回路131は、電源電圧の低下速度が基準低下速度よりも速い場合、すなわち駆動効率が悪く電力消費量が多い駆動周波数で駆動している場合や、何らかの要因によって圧電アクチュエータAが起動できない場合には、所定駆動周波数に戻してから駆動周波数変更を再実行させる。従って、起動失敗を検出するまでの時間が長期化することなく、電源電圧の低下速度に基づいて起動失敗等が即座に判断でき、この判断に要する時間が短縮化されるので、異常の検知から駆動信号の最適化までの処理を迅速に実行することができるとともに、電力消費量を低減して省電力化が実現できる。 (もっと読む)
2,831 - 2,840 / 2,886
[ Back to top ]