
国際特許分類[H02P25/06]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 交流電動機の種別または構造的な細部に特徴を有する交流電動機の制御装置または制御方法 (661) | 電動機の種類に特徴のあるもの (646) | リニアモータ (350)
国際特許分類[H02P25/06]に分類される特許
1 - 10 / 350
リニアモータ制御装置、及び制御方法
【課題】可動子の位置や移動量を検出するセンサを設けることなく、推定する磁極位置に含まれる誤差のばらつきを低減する。
【解決手段】可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの駆動を制御するリニアモータ制御装置は、予め定められた磁極位置に対応する電圧を複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、可動子が基準位置に達したと判定した際に、基準位置に対応する磁極位置を現在の磁極位置にする制御部を備える。
(もっと読む)
リニアコンベア

【課題】位置補正用データの管理負担を伴うことなく搬送台車を高い精度で位置決めする。
【解決手段】リニアコンベアは、複数の電磁石ユニット26を含み、電磁石ユニット26毎に個別に通電制御が可能なリニアモータ固定子7と、永久磁石44からなるリニアモータ可動子8及び位置補正用データが記憶されたRFタグ55をそれぞれ備える複数のスライダ4と、各電磁石ユニット26の通電制御を個別に行う複数のモータコントローラCと、RFタグ55の情報を読み取るリーダライタ60と、を備える。各モータコントローラCはそれぞれ、リーダライタ60が読み取った各スライダ4の位置補正用データを記憶しておき、スライダ4を目標位置で停止させる際には、対象となるスライダ4の位置補正用データを用いて目標停止位置を補正し、この補正後の目標停止位置に基づいて電磁石ユニット26への通電制御を行う。
(もっと読む)
線形運動デバイスの制御装置、線形運動デバイスの制御方法
【課題】検出磁場がコイル磁場の干渉を受ける場合にも、制御可能な範囲が変化しない線形運動デバイスの制御装置を提供する。
【解決手段】線形運動デバイス12の磁石10が発生する磁場から出力信号SDを出力する磁場センサ13、線形運動デバイス12を移動すべき目標位置を指示する目標位置信号SHに基づくデバイス位置指令信号SEを補正して出力するデバイス位置指令信号生成回路19、出力信号SD、デバイス位置指令信号SEの偏差を示す操作量信号SFを出力する差動増幅器14、操作量信号SFに応じて線形運動デバイス12を駆動する出力ドライバ17、18によって制御装置を構成する。デバイス位置指令信号生成回路19は、デバイス位置指令信号SEをコイル電流によって発生する磁場に対応する補正値によって補正する。
(もっと読む)
線形運動デバイスの制御装置、線形運動デバイスの制御方法
【課題】 線形運動デバイスが端点間の移動の際に発生する衝突音を抑制する。
【解決手段】磁石10が発生する磁場から出力信号SDを出力する磁場センサ13、線形運動デバイス12が目標位置にある場合に出力されるデバイス位置指令信号SEを出力するデバイス位置指令信号生成回路22と出力信号SDとデバイス位置指令信号SEとの偏差を示す操作量信号SFを出力する差動増幅器14、線形運動デバイス12に、XBOTに向かう力とXTOPに向かう力とを交互に加えながら、XBOT、XTOP間を移動させるドライバ制御信号SGを出力する端点移動制御回路19、ドライバ制御信号SG、操作量信号SFのいずれか一方を選択するスイッチ20、ドライバ制御信号SGまたは操作量信号SFに応じて線形運動デバイス12を駆動する出力ドライバ17、18によって線形運動デバイスを制御する。
(もっと読む)
リニア搬送装置
【解決手段】 リニア搬送装置3は、複数の永久磁石13aからなる可動子13と、複数のコイル14aからなる複数の固定子14と、上記可動子13の永久磁石13aの磁界を検出するホール素子17とを備えている。
さらに、上記可動子13における先頭の永久磁石13aよりも搬送方向後方に検出片18を設けるとともに、当該検出片18を検出するセンサ19を上記可動子13の搬送経路上に設ける。
上記ホール素子17が検出した可動子13の先頭の永久磁石13aの磁界から可動子13の位置を認識すると、当該認識した可動子13の位置を仮位置とし、さらに上記センサ19が上記検出片18を検出すると、当該センサ19が検出片18を検出した位置を可動子13の実位置として上記仮位置から置き換え、当該可動子13の実位置を基準に可動子13の位置を認識する。
【効果】 可動子の位置を高精度に認識することができる。
(もっと読む)
球面モータの制御装置および球面モータの制御方法
【課題】3自由度以上の回転が可能な球面モータの動作制御を直感的に把握し易い状態で行う。
【解決手段】任意の方向に回転が可能な概球回転体の運動に係る信号出力に基づき、球面モータ300のロータを動作させるために、球面モータ300の界磁コイル309への通電パターンを生成する界磁コイル通電パターン生成部201と、前記通電パターンに基づく駆動信号を出力する駆動信号出力部202とを備える。
(もっと読む)
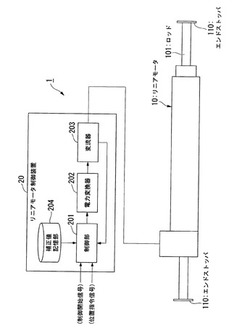
スプリングリターン機構付きボイスコイルモータの駆動回路および駆動方法ならびにそれらを用いたレンズモジュールおよび電子機器
【課題】スプリングリターン機構付きVCMの振動を抑制する。
【解決手段】制御部30は、ボイスコイルモータ110の目標ストローク量を指示する指令値を受け、制御信号V2を生成する。制御信号S2は、移動前のストローク量に対応する初期値から目標ストローク量に対応する目標値に向けて、ボイスコイルモータ110の共振周波数の逆数の整数倍の遷移時間にわたり直線的に変化する。駆動電流生成部10は、ボイスコイルモータ110のコイルに、制御信号S2に応じた駆動電流Idrvを供給する。
(もっと読む)
リニアモータ制御装置
【課題】電力変換器の切替え時の出力電圧振幅制限に伴う推力リプルを低減させることができるリニアモータ制御装置を提供する。
【解決手段】固定子巻線が界磁可動子の移動方向に複数区分されたリニアモータを、位置センサが検出する界磁可動子位置に基づいて区分毎に備えられた電力変換器を切替えて、界磁可動子を移動させるように固定子巻線に電力を供給するリニアモータ制御装置であって、電力変換器を切替える際、電力変換器の出力電圧制限または出力電流応答遅れを防止するように構成した。
(もっと読む)
位置検出装置
【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、精密機器の移動装置に適用し得る検出精度を有していない。
【解決手段】主位置演算器20は現在位置の上位桁である主位置データを出力し、従位置演算器60は現在位置の下位桁である従位置データを出力する。主位置演算器20は、磁気センサ10の検出信号から2相の矩形波信号を得て計数信号を発生し、計数信号を累積加減算して主演算データを得る。デジタルフィルタ40は、移動平均によって検出信号の振動成分を濾波する。従位置演算器60は、検出信号の逆正接を求めて従位置データを得る。位置演算器70は、主位置データと従位置データを加算して位置データを生成する。ピッチ補正器90は、移動方向に合わせて位置データをピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
リニアモータ装置とリニアモータ装置を駆動する方法
【課題】スイッチングリップルによる他の駆動回路への影響を低減したリニアモータ装置とリニアモータ装置を駆動する方法とを提供することを目的とする。
【解決手段】ライン状に整列され、順次電流駆動される複数のリニアモータと、複数のリニアモータコイルの各々に隣接して配置される複数のリップル相殺用リニアモータと、を備えリップル相殺用リニアモータは、隣接するリニアモータが電流駆動される場合に、リニアモータにより生成される磁界を低減させるように、リップル相殺用リニアモータのコイルにリップル成分のみを供給するリニアモータ装置とする。
(もっと読む)
1 - 10 / 350
[ Back to top ]