
国際特許分類[H04N7/18]の内容
電気 (1,674,590) | 電気通信技術 (544,871) | 画像通信,例.テレビジョン (280,882) | テレビジョン方式[4,2011.01] (43,981) | 閉回路テレビジョン方式,すなわち信号が放送されない方式 (7,055)
国際特許分類[H04N7/18]に分類される特許
101 - 110 / 7,055
車両の運転支援装置
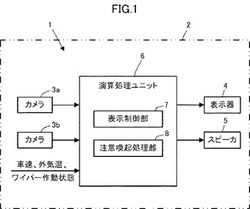
【課題】運転者が車両の前方の状況を確認し易いようにカメラの撮像画像を運転者に対して表示することができる車両の運転支援装置を提供する。
【解決手段】運転支援装置1は、カメラ3aの撮像画像を表示する表示手段4,7と、所定の条件が成立する場合にカメラ3aの撮像画像から運転者の注意を喚起すべき対象物を検出し、対象物を検出した場合に運転者の注意を喚起するための処理を実行する注意喚起処理手段8とを備える。カメラ3aの撮像画像の表示モードは、撮像画像の一部の領域(小画角領域)を拡大して表示する小画角領域表示モードと、小画角領域を含む広角領域を表示する広角領域表示モードとがある。表示手段4,7は、前記所定の条件が成立する場合には、小画角領域表示モードにて撮像画像を表示し、前記所定の条件が成立しない場合には、広角領域表示モードにて撮像画像を表示する。
(もっと読む)
画像記録装置および方法並びに画像記録プログラム

【課題】駐車場に駐車した車両と当該車両に乗降した人物の情報を含む所望の画像を選択的に記録する画像記録装置および方法並びに画像記録プログラムを提供する。
【解決手段】車両によって遮られるマークをそれぞれ有する複数の駐車エリアを撮影する撮像装置によって得られる画像に基づいて、各駐車エリアの画像が継続的に変化している期間である動作期間を駐車エリアごとに検出する動作検出部と、動作期間の開始時および終了時のそれぞれの画像から、マークの像を駐車エリアごとに検出するマーク検出部と、開始時にマークが検出され、終了時にマークが検出されないときに、当該動作期間における当該駐車エリアへの車両の入庫を判別し、開始時にマークが検出されず、終了時にマークが検出されたときに、当該動作期間における当該駐車エリアからの車両の出庫を判別する判別部と、判別部によって入庫あるいは出庫が判別された動作期間に対応して撮像装置によって得られた画像を記録する記録部とを有する。
(もっと読む)
画像送信装置
【課題】ホームセキュリティシステム等に適用される画像送信装置において、画質の低下を抑制しつつ、さらなる低ビットレート化を実現する。
【解決手段】入力画像41の画像データとあらかじめ用意されている基準画像40の画像データとを比較し、画像データが変化した領域のうち所定の条件を満たす監視対象領域42の画像データを抽出し、基準画像40の画像データに抽出された監視対象領域42の画像データを合成し、合成された画像データをフレーム間差分方式で圧縮して送信する。
(もっと読む)
警備システム
【課題】建物の周囲に設定された人物を検出可能な監視エリアに建物入口前の領域が含まれない場合でも、建物から退館する利用者と区別して建物への侵入を的確に検出可能な警備システムを提供する。
【解決手段】警備システム1は、進入規制区域の入口前の非監視エリアに外接して当該侵入規制区域の外周に設定された監視エリアを有し、監視エリアに存在する人物の位置を検知する検知手段21と、人物毎に位置を追跡し、監視エリアと非監視エリアの境界位置にて新たに出現した人物を非監視エリアからの退出人物として検出する追跡手段451と、人物毎に許可者か非許可者かを判定する権限識別手段273と、進入規制区域の入口の通過行動を検知する通過検知手段3と、通過行動が検知されてから所定の遅延時間内に許可者である退出人物を検出しない場合に進入規制区域に対する侵入異常と判定する判定手段453と、を有する。
(もっと読む)
車両用表示装置
【課題】車両の乗員が、障害物の種類、及び障害物と車両との間の距離を把握することを容易にする車両用表示装置を提供する。
【解決手段】車両の周囲撮影画像を取得する撮影手段と、周囲撮影画像を座標変換することにより、ミラー変換画像を生成する画像変換手段と、車両の全体画像を含む俯瞰画像を生成する俯瞰画像生成手段と、ミラー変換画像と俯瞰画像とを同一の表示画面上に表示する表示手段とを備え、表示手段は、表示画面に予め設定された矩形の第1表示領域に車両の全体画像の車両前方が上を向くように俯瞰画像を表示し、矩形の第1表示領域の側方であって、かつ該矩形の側辺の下側に偏って設定された第2表示領域に、ミラー変換画像を表示する。
(もっと読む)
画像解析システム及び画像解析システムの制御方法
【課題】画像解析装置の交換に当たってユーザーの作業時間を削減し、画像解析装置を短時間で最適な状態に制御できるようにする。
【解決手段】第1の画像解析装置と第2の画像解析装置とを備えた画像解析システムであって、画像を入力する入力手段と、前記入力手段による入力画像を送信する画像送信手段と、前記入力手段による入力画像に生じた変化を検出する画像解析手段と、前記画像解析手段が検出した変化を通知する変化通知手段と、前述の各手段を設定するための設定値を記憶する記憶手段とを第1の画像解析装置と第2の画像解析装置とが備えるとともに、前記第2の画像解析装置は、前記第1の画像解析装置と同一の変化通知を実現するために第2の画像解析装置の設定を変更する設定変更手段をさらに有する。
(もっと読む)
内視鏡システム及び内視鏡の外部制御装置
【課題】内視鏡の撮像装置から外部制御装置(プロセッサ装置)に撮像信号をシリアル伝送する内視鏡システムにおいて、伝送中のノイズ等により生じたワード同期(アライメント)のずれを早急に復旧できるようにした内視鏡システム及び内視鏡の外部制御装置を提供する。
【解決手段】内視鏡10に接続されたプロセッサ装置11では、内視鏡10の撮像チップ42からシリアル伝送された撮像信号をS/P変換器81でパラレルデータに変換した後、8B10Bデコーダ82で復号化する。1画素分の画素データ(8ビット)は撮像チップ42の8B10Bエンコーダ73により10ビットを1ワードとするワードデータに変換されてシリアル伝送されており、プロセッサ装置11では、ノイズ等の影響でシリアルデータをワードデータに区切るワード同期のタイミングにずれが生じたことを8B10Bデコーダ82での復号エラーにより検出してワード同期のタイミングをずらして復旧する。
(もっと読む)
車載カメラ用画像補正方法および車載カメラ用画像補正プログラム
【課題】形状や寸法が既知の図形を用いることなく車載カメラの現在の取り付け角度を求めることができる車載カメラ用画像補正方法および車載カメラ用画像補正プログラムを提供する。
【解決手段】車載カメラ用画像補正方法は、車両に取り付けられたカメラが車両の周囲を撮像するステップS1と、カメラにより撮像された画像内の路面画像にもとづいて動きベクトルを検出するステップS5と、検出された動きベクトルを、真上視点の動きベクトルとなるように車両の進行方向軸、路面法線方向軸ならびに進行方向軸および路面法線方向軸に直交する路面平行方向軸の3軸の各軸周りに独立に回転補正させるための式である真上視点の動きベクトルへの変換式を作成するステップS6と、真上視点の動きベクトルへの変換式からカメラの車両に対する取り付け角度を求めるステップS7と、を有する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】対象物体の追尾を適切に打ち切る。
【解決手段】消失領域設定部602は、撮像部601により撮像された画像データに対して領域を設定する。物体追尾部603は、画像データ内における対象物体を追尾し、対象物体が前記領域内に入った場合、対象物体の追尾を停止する。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60は、ショベル60の動作状態を検出する動作状態検出部65と物体検出装置100とを備える。物体検出装置100は、複数のカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。また、物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60の動作状態に応じて配置される。
(もっと読む)
101 - 110 / 7,055
[ Back to top ]