
波浪予測システム
【課題】実際の波浪観測ブイの設置場所に限定されることなく、任意の地点に関する波浪予報を高精度且つリアルタイムで分かり易くユーザに呈示することのできる技術の提供を目的とする。
【解決手段】第一推定値の気象予報値を観測値で修正した大気解析データに含まれる風向及び風速データを基にデータ補間してN時の波浪予報データを推算すると、これをN+α時の波浪予測のための初期条件値として波浪推算プログラムに設定し、N+α時の波浪を予測する。本処理は大気解析データが更新される所定時間間隔(α)ごとに繰り返し実行される。また、地球規模での気象変化を予測計算した全球気象予報データや局地気象データの風データを波浪推算プログラムに設定して波浪予測を行う。これにより、時間経過に伴う波浪状態の変化予報データに誤差拡大がない高精度な波浪予報データをあらゆる地点について迅速に算出することができる。
【解決手段】第一推定値の気象予報値を観測値で修正した大気解析データに含まれる風向及び風速データを基にデータ補間してN時の波浪予報データを推算すると、これをN+α時の波浪予測のための初期条件値として波浪推算プログラムに設定し、N+α時の波浪を予測する。本処理は大気解析データが更新される所定時間間隔(α)ごとに繰り返し実行される。また、地球規模での気象変化を予測計算した全球気象予報データや局地気象データの風データを波浪推算プログラムに設定して波浪予測を行う。これにより、時間経過に伴う波浪状態の変化予報データに誤差拡大がない高精度な波浪予報データをあらゆる地点について迅速に算出することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、波浪の状況をリアルタイムに予測し、高波・暴浪災害に対して迅速且つ適確な情報、及び当該情報に基づく指示又は対策を提供するシステムに関するものである。
【背景技術】
【0002】
近年、気象や波浪の観測データを処理し、閲覧できるインフラが整備され、得られたデータを波浪予報のために提供する仕組みが複数の機関を通じて展開されるようになってきた。例えば、気象庁は、波浪予報や、全国12ヶ所ほどの気象庁波浪ブイからの観測データをホームページ上で誰もが自由に検索できる形態で提供している。国土交通省からも同様な情報提供が行われており、例えば、防災情報センターのホームページからは潮位および波高の観測データを閲覧することができたり、国土交通省港湾局の全国港湾海洋波浪情報網(ナウファス)では、波浪ブイを設置した全国52の観測所から送られた有義波実況や周期帯波浪のデータをダウンロードすることもできる。
【0003】
気象・波浪などに関する情報提供において特に考慮しなければならない点が、情報配信のリアルタイム性である。行政は、災害気象・水害事象が刻々と間近に迫り来る地域の早期警戒を行って的確な避難対策を決定し、住民に迅速な指示を出すことが重要である。また、水害や海難事故を未然に防止するには、住民やユーザが主体的になって現況をリアルタイムで把握できるようになっていることが災害の被害を小さくすることにつながる。このような観点で生み出されたシステムの一つが、(財)沿岸技術研究センターによる情報配信システムのカムインズ(COMEINS)であり、全国港湾海洋波浪情報網(ナウファス)の波浪観測情報を気象情報と統合して気象・海象に関する情報をオンライン・リアルタイムで提供している。
なお、非特許文献1は、気象モデルと浪波モデルを用い、波浪を計算する方法の概要と数点の観測値との比較が示されている。
【0004】
【非特許文献1】間瀬ら他4名,GFS-WRF-SWANシステムによる3シーズンの波浪予測とシステムの検証,海洋開発論文集,第22巻,pp.109-114, 2006.
【発明の開示】
【発明が解決しようとする課題】
【0005】
従来のリアルタイム波浪予測技術の場合、波浪予測のための計算と、波浪観測のための観測とがそれぞれ別個のシステムによって行われており、その結果は、それぞれのシステムから独立した波浪情報として一般に閲覧されたり、更なる分析のために提供されるようになっている。つまり、過去に予測した数値を最新の観測値で自動的に補正するというような連携は図られておらず、高い信頼性を担保したリアルタイム波浪予測になっていない。高信頼度のリアルタイム波浪予測とは、得られた予測データをそのつど補正しながら、最新の波浪予測データに更新し続けることである。仮に、波浪予測情報を知りたい一般ユーザが観測データについて独自に判断しなければならないとすると、刻々と変化する災害時の現況把握や予測を適確に行うことはできない。一方で、専門家によりデータ分析がなされ、修正後の予測データが提供されるまで待っていたのでは、これまでと同様に、実際の災害危険への対応を迅速に行うことは難しい。現に、災害の備えや対応の判断が遅れたために過去に繰り返して深刻な被害が起きている。複数のシステムからの気象情報が有機的に連携又は統合され、その結果、高信頼度のリアルタイム波浪予測が実現されなければ、事前の対策で本来防止できる災害の危険性を解消できないことが指摘されている。
【0006】
上記カムインズ(COMEINS)は、国土交通省港湾局とは別組織の気象庁が提供する波浪予測システムにより演算された結果を取り込んで、ナウファスの波浪観測情報と合体させてから独自の処理を行う。しかし、予測値が更新されるのは1日あたり2回でしかなく、オンライン・リアルタイム予報システムというものの、真のリアルタイム予報になっていない。実況観測データを基に小刻みで予報値を修正し、まさに現時点の様子から推測される数時間先の予報を可能な限り実際に近似させてタイムリーに提供するという形態にはなっていない。なお、上記非特許文献1もリアルタイム予報についての記述はない。
【0007】
また、上述した国内最大の波浪観測網である全国港湾海洋波浪情報網(ナウファス)は、観測機器が設置されている全国52ヶ所の観測点に限っては観測データをリアルタイム情報として取得し、緊急時の速やかな状況把握の基本データとして活用することができる体制にはなっている。しかし、52ヶ所の観測点以外の場所については、現況を観測する手段を有していない。この対策として、重要地点とみなせる観測空白地点に、新たな投資によって多数の観測機器を設置することが考えられる。しかしながら、多数の地点に設置した観測機器からのデータを用いてリアルタイムな波浪観測を実現する構想は予算的に厳しく、現実的には不可能といえよう。例えば、独立行政法人防災科学研究所の波浪観測ブイは、相模湾唯一の波浪観測ブイとして1965年より神奈川県平塚沖に設置され、海浜・沿岸災害の軽減に幅広く寄与してきたが、その老朽化が進んだこともあって、独立行政法人整理合理化計画(平成19年12月24日閣議決定)に基づき、平成20年3月末をもって廃止されることとなった。この波浪観測ブイの運用費は、漁業保障費だけで年間4000万円にも達していたといわれている。さらに、観測ブイは観測データ送信システムの故障や、観測ブイの機械的な故障または高波による故障や破損などのリスクが高く、点検・修理費用も発生する。具体的には、精密機器としての観測ブイ1基の年間リース料は約500万円、保守費は約900万円かかり、他にも通信装置・配信装置に数千万円の諸経費が必要である。さらには、収集した各所データを解析し、予測データを計算する波浪処理システムに用いるスーパーコンピュータは、全国の沿岸の解析を行うために莫大なランニングコストを必要としている。
【0008】
したがって、全国52箇所のナウファス観測点や全国12箇所の気象庁波浪計が設置された以外の場所も網羅しながら、いつでもどこでもリアルタイムな波浪観測を実現することは経済上不可能であり、数時間先の状況を把握するための波浪予測をリアルタイムで継続的に行える場所は、自ずと限定されてしまっている。
【0009】
既存観測点以外の場所の現況を知る他の手段としては、既知のデータを基に演算により類推する方法がある。具体的には例えば、既存観測点を結ぶ内側の領域については、周辺の既存観測点から得られる過去のデータ或いはリアルタイム情報を内挿(補間)することによって推測することが挙げられる。しかしながら、この演算によって値を推測する方法にしてもコスト面又は演算時間の制約が大きく、現実の問題解決策には成り得ないままであった。
【0010】
そこで、本発明は、実際に観測データを得ることができる波浪観測ブイの設置場所に限定されることなく、任意の地点に関する波浪予報を高精度且つリアルタイムで分かり易くユーザに呈示することのできる技術を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の波浪予測システムは、第一推定値の気象予報値を観測値で修正した大気解析データと、海洋の波浪状態を予測する波浪推算プログラムとを利用して海洋の波の諸量を予測する波浪予測システムであって、所定の時間間隔で得られる前記大気解析データから風向及び風速データを抽出するデータ受信手段と、前記大気解析データに含まれる風向及び風速データを基に、N時の所定時間(α)前の時点(N-α)からN時の間をデータ補間することによってN時の波浪データを推算し、当該推算データ値をN+α時の波浪予測のための初期条件値として前記波浪推算プログラムに設定して、N+α時の波浪を予測する波浪予測手段とを有し、前記データ受信手段が、更新後の新たな大気解析データの風データを所定時間間隔(α)で受信するたびに、前記波浪予測手段は、当該更新後の風データによるデータ補間に基づき推算した波浪データ値を、次のα時間後の波浪予測の初期条件として前記波浪推算プログラムに再設定して前記所定時間(α)経過後の波浪予測を繰り返すことにより、時間経過に伴う波浪状態の変化予測データに誤差拡大がないようにすることを特徴とする。
【0012】
また、本発明の波浪予測システムの前記データ受信手段は、地球全体の大気の状態変化を数値的に計算し地球規模での気象変化を予測計算した全球気象予報データを更に受信し、前記波浪予測手段は、前記全球気象予報データに含まれる風向及び風速データを前記波浪推算プログラムに入力して演算した広領域波浪予報データを、前記所定時間間隔(α)ごとに繰り返される波浪予測のための領域境界条件として前記波浪推算プログラムに設定することを特徴とする。
【0013】
また、本発明の波浪予測システムの前記波浪予測手段は、前記波浪推算プログラムに対し、前記広領域波浪予報データを前記広領域内の局所領域の境界条件として設定し、さらに、メソスケールの気象変化を予測する局地気象予測プログラムを用いて求めた前記局所領域の風データを初期条件として設定して前記局所領域の波浪予測を行うこと、さらに、前記大気解析データに含まれる風向及び風速データをデータ補間することにより推算されるN時の波浪データと、前記初期条件として設定されるN時の波浪予報データとをデータ同化処理した結果を前記初期条件とすること、さらに、前記波浪予報データを画像データとして表示するためのデータ変換手段をさらに含み、データ変換手段は、前記波浪推算プログラムを用いて推算された波浪予報データを緯度又は経度の値によって分類して、同一な緯度又は経度を有する波浪予報データが1つの単位となるように管理又は記憶媒体に記憶し、当該1つの単位ごとに画像描画ソフトウェア用のデータフォーマットで変換することを特徴とする。
【発明の効果】
【0014】
本発明によれば、第一推定値の気象予報値を観測値で修正した大気解析データに含まれる風向及び風速データを基にデータ補間してN時の波浪予報データを推算すると、これをN+α時の波浪予測のための初期条件値として波浪推算プログラムに設定し、N+α時の波浪を予測する。そして、大気解析データが更新される所定時間間隔(α)ごとに本処理を繰り返し実行するので、時間経過に伴う波浪状態の変化予測データに誤差拡大がなく、これにより、波浪予報データの精度を実際の波浪観測ブイによる観測値と同程度にまで向上させることができる。
【0015】
また、本発明によれば、地球規模での気象変化を予測計算した全球気象予報データや、さらには局地気象データの風データを波浪予測に用いるので、対象とする地域の地形情報を詳細に取り込んで解析した波浪予報データを出力することが可能であり、実際に観測機器が設置されていない地点を含むあらゆる地点の波浪データを精度良く算出することができる。したがって、物理的な観測機器及びその運用に関する高額な費用を削減し、高精度な波浪予報データをユーザに対して安価に提供することが実現される。
【発明を実施するための最良の形態】
【0016】
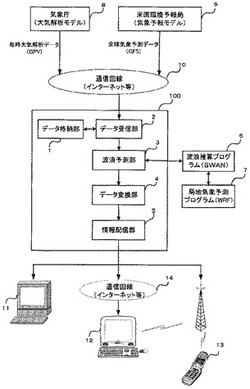
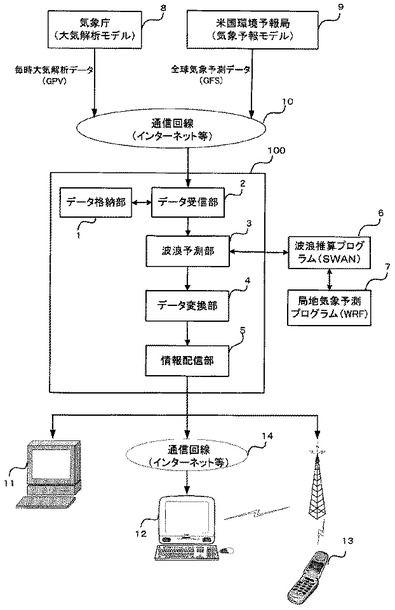
以下、図面を参照しながら本発明のリアルタイム波浪予測システム(以下、「波浪予測システム100」という。)の一実施形態について説明する。図1は、波浪予測システム100及び関連する周辺機器の全体構成を示すものである。本発明のために開発した波浪予測システム100は、データ受信部2、データ格納部1、波浪予測部3、データ変換部4、及び情報配信部5を含む構成である。波浪予測システム100は、気象庁に関連する(財)気象業務支援センターの毎時大気解析モデル8から提供されるデータ(略して「GPVデータ」と称する。)、及びアメリカ環境予報局(NCEP:National Centers for Environmental Prediction)の全球気象予測システム(GFS:Global Forecasting System)9が解析した気象データ(略して「GFSデータ」と称する。)をインターネット等の通信回線10を介してデータ受信部2により受信し、データ格納部1に格納する。
【0017】
波浪予測部3は、デルフト工科大学で開発された第3世代波浪推算モデル5(SWAN:Simulating WAves Nearshore)を用いて波浪予測計算を行う。波浪予測部3は、予測計算のためにデータ格納部1に格納されたGPVデータやGFSデータを用いる。
この全球気象予測システム(GFS)9は、気象データを全球にわたり、緯度方向に768、緯度方向に384に区切ったメッシュ格子点で気象予測解析を実行する。解析結果は、緯度・経度方向にそれぞれ1度間隔の地点(約100kmメッシュ)における3時間毎の384時間先までの予測データとしてWeb上にロードされ、1日4回(00,06,12,18(UTC):協定世界時)更新されるようになっている。そこで、波浪予測システム100の波浪予測部3は、全球気象予測システム(GFS)9から入手できるGFSデータ(気圧、風向・風速、気温、降水量、雲量など)のうちの3時間毎の風向及び風速データを使用する。なお、GFSは太陽放射が熱源となって生じる地球放射、対流、降水、内部重力波を精巧に気象モデルに取り込み、気圧風向・風速、気温、降水量、雲量等の予測データを、NCEPのWebサイトからインターネット回線を通じてダウンロードすることができるようになっている。
【0018】
ところで、波浪予測は、陸上地形や岬などの周辺地形による影響を少なからず受ける。このため、第3世代波浪推算モデル(SWAN)6が、全球気象予報システム(GFS)9で解析されたメッシュ格子点の風予報データをそのまま使用しても、波浪予測値が実際の観測値に一致していると評価できるまでに予測精度を上げることが困難である。そこで、アメリカ大気研究局(NCAR:National Center for Atmospheric Research)によって開発された局地気象予測モデル(WRF:Weather Research Forecasting model)6を用いて、全球気象予報モデル(GFS)9の対象地域をダウンスケールさせて予測精度の向上を図ることが有効である。局地気象予測モデル(WRF)7を用いた波浪予測の場合、地球の熱循環の駆動力として働く対流にも着目することになり、メソスケール(数km〜数千km)で発生する対流現象をとらえた風データを用いて波浪予測の演算を行うことができる。
【0019】
データ変換部4は、波浪推算モデル(SWAN)6を用いて演算された波浪予報データを、アニメーションなどの画像表示に適したデータ形式に変換する。本実施形態の波浪予測システム100は、波浪予測した結果を多くのユーザに共有してもらうことで災害防止やマリンレジャーに役立てることを目指しており、ユーザが理解し易い画像表示になるようデータ配信することが必要である。しかしながら、SWAN5からのデータは、波浪予測の結果を画像表示の形式で短時間に配信できるようになっていない。そこで、データ変換部4により、画像処理時間をできるだけ少なくするのに有効なデータ変換をする。
情報配信部5は、上記データ変換された波浪予報データを、インターネットや専用回線などの通信回線14と接続する情報端末12に送信する。なお、専用回線で特定の情報端末11や、無線通信で携帯端末13などの各種情報端末に送信してもよい。
【0020】
ここで、本波浪予測システム100の具体的な装置構成について説明する。
日々の気象変化は、風や気温、湿度などの複数の物理量による影響を受けるので、その予測も複雑にならざるをえない。一方で、これらの物理量の時間変化は、いくつかの基本的な物理法則によって支配されており、それらの支配方程式を解くことで気象解析が可能になる。一般に、気象モデルを用いた地球環境シミュレーションがそうであるように、気象情報を解析するには超高性能なスーパーコンピュータを準備して、上述した複雑な支配方程式の解を求める。しかし、そのようなスーパーコンピュータは極めて高価であり、国立や政府などが関与する一部の公的機関でしか調達することができないものである。
【0021】
本実施形態では、気象庁8や米国環境予報局9から入手可能な気象解析結果を利用することでスーパーコンピュータを自前で調達することを不要にし、スーパーコンピュータに代わるパソコンシステムとしての Class I Linux Beowulf クラスターコンピュータシステムを採用した。クラスターコンピュータ上でオープンソースの気象予測モデルシステムを実行して波浪解析を行い、任意の地点の風情報および波情報を高精度且つリアルタイムで予測するシステムを実現するものである。なお、以下の理由により、Class I Linux Beowulf クラスターコンピュータシステムを選択した。
1)市販のハードウェアでクラスターコンピュータシステムを組むことができ、Ethernet(登録商標)やその他のネットワークに接続可能である。
2)上述したWRF6やSWAN5を、メモリ分散型の並列計算を行うためのMRI規格を実現したライブラリーであるMPICHを使って並列計算を行うことができる。
3)従来のスーパーコンピュータの価格/パフォーマンス比と比較すると、約3倍〜10倍の向上が見込める。
4)GNUオープンソースライセンス下でのオペレーティングシステムやソフトウェアを利用することが可能である。なお、オペレーティングシステムは、MPICHを備えたFedora Linuxとした。
【0022】
次に、本実施形態の波浪予測システム100による波浪予測の処理内容について図2〜図5のフローチャートを使って詳細に説明する。
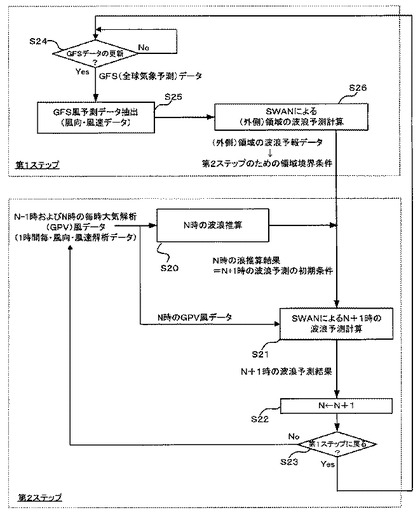
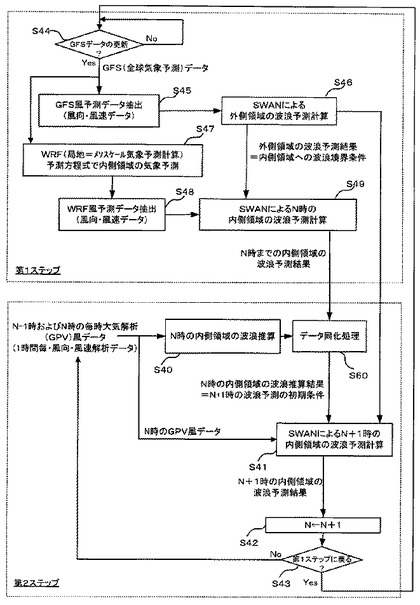
図2に示す処理は、波浪予測部3が、GFSデータの更新があるたびにN時までの波浪予測を行う第1ステップと、第1ステップでの波浪予測を予測対象領域の境界条件としながら、かつ、GPV風データを用いて予測の初期条件を生成し、波浪予報データを毎正時に修正する一連の処理を示している。
【0023】
(1)第1ステップ(外側領域の波浪予測)
波浪予測システム100が、第1ステップで受信するGFSデータには、全球気象予測システム(GFS)で解析された気圧、風向・風速、気温、降水量、雲量などの384時間先までの気象予測データが含まれている。波浪予測システム100のデータ格納部1は、米国環境予報局9からインターネット等を介してダウンロードした上記GFSデータを格納する。波浪予測部3は、このデータ格納部1から、風向及び風速のデータ(以下、「GFS風予測データ」と称する。)を抽出する(ステップ25)。主として、風向や風速が波浪の変化を左右するからである。
【0024】
次に、波浪予測部3は、GFS風予測データを波浪推算プログラム(SWAN)6に入力して、波浪予測の演算を実行する(ステップ26)。GFS風予測データは、地球全体を対象としているので広範囲な領域の予測データである。本実施形態では、この広範囲な領域を「外側領域」と称し、例えば、北緯5〜55度、東経120〜175度の領域、1度(約100km)メッシュで10分間隔の海底地形データ及び0.5度毎のGFS風予測データを基にした演算がなされる範囲である。
【0025】
波浪予測で用いる波浪予測プログラム(SWAN)の具体的な演算式は、以下のように表される。

ここで、(x,y)は位置座標、tは時間、A(σ,θ)はエネルギー密度を相対角周波数σで除した波作用量、θは波向角度である。CxおよびCyは、それぞれ、xおよびy方向の群速度、CσおよびCθは、それぞれ、相対角周波数および波向角に関する特性速度、UおよびVは、それぞれ、xおよびy方向の流れの速度を表す。また、式(1)の右辺のSは、風エネルギーの移流、波の共鳴干渉によるエネルギー移流、水深で決まる砕波によるエネルギー減衰、および白波によるエネルギー減衰を表すソース項である。
【0026】
図2のステップ26では、GFS風予測データが式(1)のソース項Sの中の風によるエネルギー移流項に入力される。そして、演算結果である外側領域の波浪予報データは、第2ステップにおけるステップ21に渡される。
【0027】
(2)第2ステップ(波浪予報データの毎時修正)
次に、第2ステップの処理について説明する。第1ステップで、波浪予測部3が受信するGFSデータは、1日4回(00,06,12,18(UTC))更新されるので、例えば、00時に入手した後、次の更新データを受信する06時までの間、波浪予測部3は第1ステップで求められた第一推定値としての波浪予報データに対して、逐次、修正を施す。つまり、第2ステップは、第1ステップでの波浪予測値の精度をさらに向上する目的で、気象庁の気象業務支援センター8より毎正時から30分以内に提供される風と気温に関して解析された毎時大気解析(GPV)のうちの風データを使って、N時に至るまでの波浪予測値を求める処理を行う。
【0028】
第2ステップの具体的な処理内容を説明する前に、毎時大気解析(GPV)のデータについて説明しておく。現在、地上から上空に向けて電波を発射し、大気中の風の乱れなどによって散乱され戻ってくる電波を受信・処理することで上空の風向風速を測定する観測装置(例えば、ウィンドプロファイラ)が既にある。毎時大気解析GPVの風データ(風向・風速)は、メソスケールで解析した推定値をウィンドプロファイラなどの観測値で修正させている。解析データでありながら実際の観測値で修正処理が行われているために、メソスケールの実際の観測データを取得したことと等価値である。気象庁のドップラーレーダーやアメダスのデータによるウィンドプロファイラを用いた風情報WINDAS(ウィンダス)、或いは降水ナウキャストなどにおいても、実際の観測データを用いた気象予報を行っている。しかし、これは、波浪大気解析で使用されるような10kmメッシュ3時間毎のモデル格子点で解析された値に対して、近隣地点の波浪観測ブイからの波浪観測データ、即ち、“波”データを内挿することで当該モデル格子点の修正及びモデル格子点以外の地点のデータ予測をする。このため、波浪観測ブイの観測データ数が直接的に予測精度に反映し、上述したように既存の全国59ヶ所にあるナウファス波浪観測ブイ数以上の設置を期待できない現状では予測精度の面から自ずと限界が生じている。そこで、本願発明では、“波”データに代わり、毎時大気解析(GPV)で得られる“風”データを使用する。GPVによる風データは広範囲な領域における連続した大気の流れの状態から把握される観測データである。したがって、仮にドップラーレーダーやアメダスで各地点のスポット的な風データがつなぎあわせられてGPV風データが擬似的に生成されたとしても、GPV風データが本来的に有する広範囲な領域内での連続且つ無矛盾なデータ特性が正確に反映されることは不可能であって、GPV風データの代用にならないことは明らかである。むしろ広領域内からでしか把握されない筈の風データの特性を恣意的に生成してしまうので本願が意図する高精度なデータ予測に悪影響を及ぼしかねない。これに対して、GPV風データは上述したようにウィンドプロファイラなどの観測値で修正されており、非常に高精度なデータである。したがって、GPV風データは波浪予測値の高精度化のためには非常に有益なデータである。
【0029】
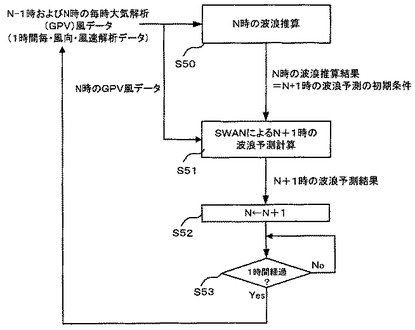
第2ステップにおいて、波浪予測部3は、まず、気象業務支援センター8からのN-1時及びN時のGPV風データを受信すると、N-1〜N時の間の風向及び風速データが線形に変化すると仮定し、このN-1時〜N時の間を線形内挿、即ち直線補間して、N時に至るまでの波浪予測値を求める(ステップ20)。波浪予測部3は、このN時までの波浪予測値をSWAN6に入力する(ステップ21)。
SWAN6による波浪予測の演算式は既に第1ステップのところで示したとおりだが、上記式(1)のような偏微分方程式の数値積分に当たっては、計算対象領域の初期の状態(初期条件)と計算対象領域を囲む境界上での条件(境界条件)が必要である。通常、初期条件は、波がまったく無いという条件を用いて、風による波の発達を計算するが、この方法では安定した計算結果を得られるようになるまでに時間(スピンアップ時間)がかかる。そこで、本願の波浪予測システム100の場合、ステップ20で求めたN時の波浪予測状況を初期条件として用いる。このため、スピンアップ時間が非常に短いという利点がある。しかも、境界条件は、GFSの風データを用いて計算される外側領域の波浪の予測結果を用いるので、外側領域から入射するうねりの条件を波浪計算に導入することができる。
【0030】
このように、波浪予測部3は、ステップ20で求めたN時の波浪予測をN+1時の波浪予測のための初期条件とし、そしてステップ26からの境界条件とともにSWAN6に設定して、更新後の新たなGFSデータを受信するまでの間(ステップ23のNo)、毎正時のたびに波浪予測の修正が繰り返し行われる。更新後の新たなGFSデータを受信する時間の近くになると(ステップ23のYes)、処理は第1ステップに戻って新たなGFSデータを受信し(ステップ24)、上述した処理が繰り返される。
【0031】
なお、式(1)の左辺の第1項は時間発展を記述する時間微分項であるが、時間が進むごとに波作用量Aが更新されることを意味している。波作用量Aの時間変化は、式(1)の右辺のソース項Sに含まれている風エネルギーを外力エネルギーとして発達・減衰するが、そのほかにも波の力学特性に基づくエネルギーの出入りがソース項Sに含まれており、そのエネルギーのやり取りの結果、N+1時の波作用量Aが求められる。そして、計算された波作用量Aから波高、周期、波向等の諸量が求められる。
【0032】
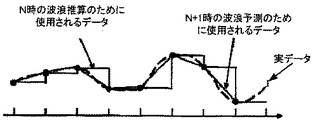
より具体的な一事例で説明すると、2:00の時点で1:00及び2:00のGPV風データを線形内挿して得られる2:00に至るまでの風データを、SWAN6に代入して式(1)に基づき実行する。そして、得られた2:00の計算結果が1時間後である3:00の波浪予測値のための初期条件として適用され、かつ、2:00の時点のGPV風データがその後の1時間は不変であるという条件下で、3:00に至るまでの波浪予測値がSWAN6により求められる。同じように、4:00までの波浪予測は、3:00と4:00でのGPV風データから3:00に至るまでの風データを線形内挿して求め、これを3:00の時点のGPV風データとともにSWAN6に代入することで4:00までの波浪予測値を算出する。このように、5:00までの波浪予測、6:00までの波浪予測が、それぞれに1時間前からのGPV風データと、当該時刻までに予測修正された波浪予報値から推算される。6:00の予測値は、毎正時のたびに実際値に近似するように修正が積み重ねられた最新データに基づいて演算されていることになる。そして、次のGFSデータ更新時刻(例えば、06時)になると、第2ステップを終了して、第1ステップへとリターンする(ステップ23のYes)。
【0033】
本願の第2ステップによれば、毎正時のたびに受信する新たなGPV風データから初期条件を生成し、次の1時間後の波浪予測を行うことが繰り返されることになる。これは、時間の経過に伴い海洋状態が変化し、その結果、数時間前の海洋状況を基に予測していた波浪予報データが実際と大きく乖離することを防止できる。1時間ごとの最新の風データを波浪推算プログラム(SWAN)6に適用した予報データは、後述する検証結果が示すとおり、実際の値と極めて近似していることを確認している。
【0034】
本実施形態によれば、GFSデータの更新があるたびにN時までの波浪予測を第1ステップで行い、これを第2ステップのSWANによる波浪予測における境界条件にし、かつ、毎時大気解析(GPV)の風データを基に補間したN時までの波浪予測値を初期条件にする。したがって、広範囲な海洋全体の気象条件を波浪予測に反映できるとともに、N+1時の波浪予測が、N時という1時間前の安定した波浪状況から計算させることが可能であるため、スピンアップ時間を従来よりも格段に短くさせることができる。
また、本実施形態の場合、初期条件を作成するのにGPVの風データを用いることから、広範囲な領域での連続した大気の流れから把握される観測データが波浪予測に反映することとなり、波浪予測の精度を向上させることができる。
【0035】
次に、図2の第1ステップにおける処理にステップ37〜39を追加した図3の波浪予測について説明する。
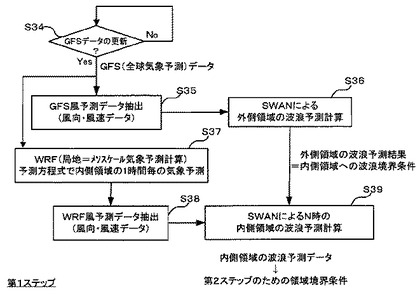
図3に示す本実施形態は、「外側領域の波浪予測」の実行の後に、「内側領域の波浪予測」の演算を行うものである。つまり、外側領域の波浪予測と内側領域の波浪予測という二段階の手順を踏んでいる。
【0036】
外側領域を対象とする予測演算は、処理時間の関係上、メッシュ格子点の間隔は粗くなる傾向があり、これに伴い沿岸域での解析精度は低下しがちである。このため、高精度な波浪予測のためには局地領域を設定し、その領域内でメッシュを細かくした演算が要求される。しかし、広範囲な外側領域の予測が不必要になるというわけではない。例えば、数日後、数週間後に局地領域に到達するような遠く離れた海洋上に熱帯低気圧が発生したことは、外側領域での波浪予測がなされてこそ捉えられるのであって、いきなり特定の局地領域に絞って演算すればよいとは必ずしもならない。局地領域の解析の前提として、広範囲な海洋全体の気象の動きを事前に把握しておくことは予測精度の向上にとって重要である。本実施形態では、このような観点から外側領域及び内側領域という二段階の波浪予測を行う。
【0037】
ステップ37で、波浪予測部3は、アメリカ大気研究局(NCAR)の局地気象予測プログラム(WRF)7を用いてメソスケールの気象予報データを計算する。WRF7は、外側領域の予測で用いられた1度間隔(約100kmメッシュ)のGFSデータを内側領域計算のための初期値・境界値条件として取り込む。内側領域とは、外側領域に含まれる局地領域を指し、本実施形態の場合、例えば北緯24〜47度、東経126〜149度の領域である。そして、予測方程式と呼ばれる6つの方程式と診断方程式、気体の状態方程式を解き、気圧、風向、風速、気温、降水量、雲量などの予測データを約5km〜500m(メソスケール)間隔のメッシュ格子点で算出する(ステップ37)。全球気象予測システム(GFS)のメッシュ間隔と比べて、大幅にダウンスケールした各地点の予測データとなる。
【0038】
波浪予測部3は、WRF7で演算された気象予測データのうち、1時間間隔の風向・風速である風予測データを抽出する(ステップ38)。そして、抽出した風予測データ、及びステップ36で算出した外側領域の波浪予測結果をSWAN6に設定して、内側領域を対象とした波浪予報データを計算する(ステップ39)。
【0039】
本実施形態によれば、GFSの風データを用いて計算された外側領域の波浪予測が、内側領域の波浪予測の境界条件として導入されるので、外側領域から入射するうねり等の状況が反映された内側領域の波浪予報データとなる。したがって、空間的な精度が高いWRF風データに基づく波浪予測を行うことができる。
【0040】
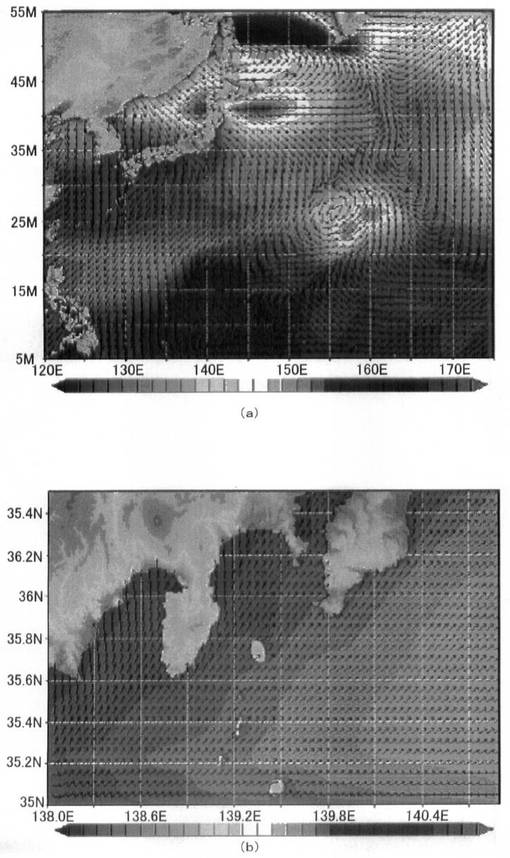
図6(a)は外側領域の波浪予測の結果を示す一例である。日本近海を対象とした1度(約100km)メッシュで波浪解析した。また、同図(b)は、地形が複雑な狭領域の内側領域における波浪予測結果を描画したものである。
【0041】
次に、図4に示す波浪予測について説明する。図4の特徴は、ステップ60が追加されている点である。他のステップについては図2又は図3の処理と重複するので省略し、この追加したステップ60について説明する。
ステップ60は、第1ステップからの波浪予報データと、実際の観測値であるGPV風データとのデータ同化処理を行う。データ同化処理とは、波浪推算プログラムに設定する初期条件や境界条件、さらには他のパラメータの与え方によって、予報データが現実の現象から乖離して著しく不適切になることを防止するために行われる処理である。本願では、境界条件という空間的な精度を考慮した第一推定値としての意味をもつN時の波浪予報が第1ステップより得られ、そして時間的な精度を考慮するための初期条件となるGPV風データを基にしたN時の波浪推算が第2ステップより得られ、これらの値がN+1時の波浪予測に影響を与えることから、両値を融合させることで精度の高い初期条件を作成する。データ同化処理の手法としては、具体的には例えば、第1ステップからの波浪予報値と、第2ステップからのGPV風データを基にした波浪推算値との重み付き平均、或いは単純平均をとって、SWAN6に設定すればよい。なお、データ同化アルゴリズムは、重み付き平均、或いは単純平均に限定するものではなく、アンサンブルカルマンフィルタ、粒子フィルタ、混合カルマンフィルタ、変分法などの様々な同化手法を適用することができる。さらに、全国港湾海洋波浪情報網(ナウファス)による観測データを同化させるようにしてもよい
なお、第1ステップのステップ46で得られた波浪予測結果は、ステップ41でのSWANで境界条件としても用いられる。
【0042】
本実施形態によれば、上述したように、境界条件という空間的な精度を考慮した第一推定値としての意味をもつN時の波浪予報と、時間的な精度を考慮するための初期条件となるGPV風データを基にしたN時の波浪推算とのデータ同化処理を行い、その結果をSWAN演算のための初期条件にすることができる。これにより、高精度の初期条件を用いてN+1時の波浪予測が行われることになり、波浪予測の精度を向上させることができる。
【0043】
次に、図5に示す波浪予測について説明する。この処理は、これまで説明してきた図2〜4の第2ステップの内容に相当する。繰り返しになるが、本処理の特徴は、N-1時及びN時に観測された風データ(波浪に関する直接的な波高データではなく、風データであるという点に注意)によってN時の波浪予測値が再計算される点、その再計算された波浪予測値によりN+1時の波浪予測が修正される点である。このような予測処理は、毎正時の時点の波の変化状況を入力条件として導入するので、計算結果が安定するまでのリードタイムであるスピンアップ時間を短縮し、計算プロセスを高速化することができる。本処理を模式的に表したのが図7である。
【0044】
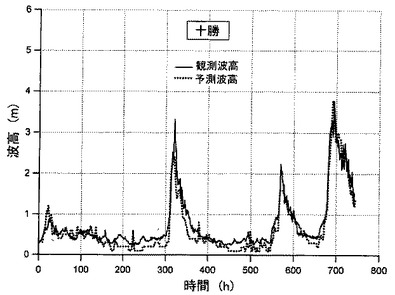
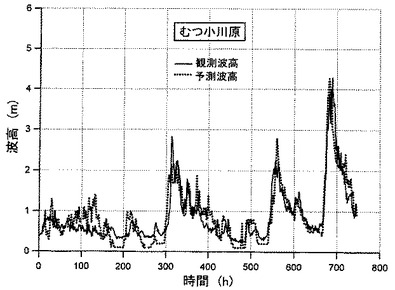
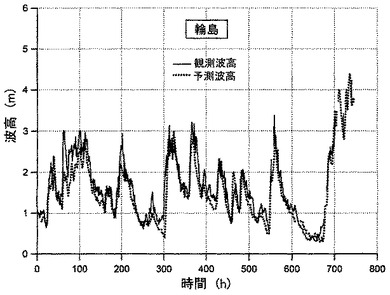
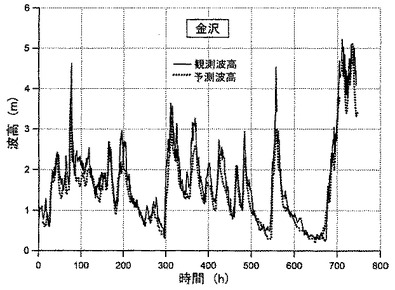
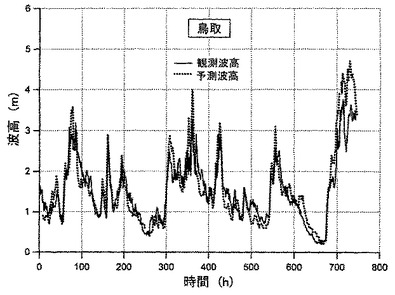
次に、本波浪予測システム100による波浪予測値の評価結果を示す。本波浪予測システム100を用い、図4に示す処理を行って算出した2007年12月1日から31日間の予測結果を、外洋に開いた観測点とみなされる輪島、金沢、鳥取、浜田、紋別、十勝、むつ小川原の7地点のナウファス観測結果と比較・検討した。図8は、上記7地点のうちの5地点における1ヶ月間の波浪予測結果及び観測結果を時系列で示している。上から (a) 十勝, (b) むつ小川原, (c) 輪島,(d)金沢, (e) 鳥取の有義波高データを縦軸に示している。グラフ中の実線が観測結果データであり、破線は予測結果データである。5地点の何れにおいても、1ヶ月間と通じて予測結果と観測結果がほぼ一致しており、本願発明による予測精度が非常に高いことが裏づけられた。
【0045】
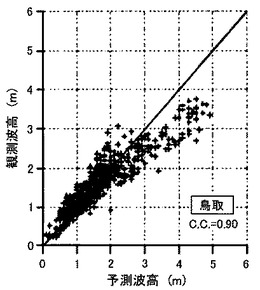
また、図9は、有義波高の予測値を横軸に、観測値を縦軸にプロットすることで、予測値と観測値を直接に対応させて相関性を調べた結果である。具体的な相関係数値を算出すると、十勝(0.97),むつ小川原(0.94),輪島(0.91),金沢(0.89),鳥取(0.90)であった。鳥取の場合、高波高領域において傾き1の直線より予測値側にプロット点が集中していることから、高波高領域で予測値が大きくなる傾向が示された。それ以外の地点の場合は、全般的に観測値側にプロット点が集まっており、予測値が観測値より若干小さな値を示す傾向があった。いずれにしても、全地点で、相関係数の値がほぼ0.90又はそれ以上というように予測値と観測値の対応が良いことがわかり、本願発明が波浪予測の技術として実用化し得ることを確認できた。
【0046】
また、従来のシステムが現時点の気象状況から推測される数時間先の予報を可能な限り実際に近似させてタイムリーに提供することができなかったのに対し、本願の波浪予測システムは、少なくとも毎正時に得られる毎時大気解析(GPV)風データを使ってN+1時の波浪予測が遅滞無く実行できる。つまり、本願の波浪予測システムは、従来の波浪予測が達成し得なかった真のリアルタイム予報を実現する程の高速性を備えている。
【0047】
なお、本実施形態では、波浪予測部(SWAN)6が、外側領域を北緯5〜55度、東経120〜175度の範囲とし、1度(約100km)メッシュで解析を行った結果を示したが、外側領域が本範囲に限定されるものではないし、メッシュ間隔も使用する処理装置の演算性能で任意に設定し得るものである。同様に、内側領域の範囲やメッシュ間隔などが任意の値を取りうるものであることは言うまでもない。
さらに、本実施形態では、データ受信部2が、気象業務支援センターからの毎時大気解析GPV風データ、及び全球気象予測システムが解析したGFSデータを受信する構成であることを示した。そして、波浪予測部3が波浪推算プログラム(SWAN)6及び局地気象予測プログラム(WRF)7を用いて予測演算を実行するものとして説明してきた。これは、現時点で、これらのデータ及びモデルを低コストで入手でき、データ加工し易いこと等を理由に採用したに過ぎない。同等又はそれ以上の高精度なデータを入手し、代替の推算又は予測プログラム(モデル)を用いた場合でも、本願発明の実施を妨げるものではない。
【0048】
なお、必ずしも局地気象予測モデル(WRF)によりダウンスケールした局地気象予測モデル(WRF)を用いて内側領域の波浪予測を求めなければならないというわけではない。図2のフローチャートに示すように、例えば、陸上から遠く離れた外洋や、海底地形の変化が小さい領域等の場合、WRFでダウンスケールすることなく全球気象予報システム(GFS)上のメッシュ格子点による解析が行われるようにしてもよい。
【0049】
また、本実施形態の場合、N-1時〜N時の間を線形内挿して計算することとしたがこれに限定したわけではない。例えば、N-1時及びN時の風データのみならず、N-1時〜N時の間を多項式補間して得られるGPV風データによる波浪予測値を使用してもよい。また、毎正時(1時間ごと)になると、GPV風データを受信し第2ステップを繰り返すように説明したが、毎正時に限定したものではないことは言うまでもない。一定時間の経過後になると第2ステップでの反復が繰り返される一例として挙げたものである。
【0050】
上述してきた本実施形態の波浪予測システム100によれば、波浪ブイなどの波浪観測機器が設置されていない海洋地点においても、言い換えれば、実際の波浪観測機器の存在とは無関係に、これら観測機器から得られるデータを基にした波浪予測と同程度の精度で従来に比べて格段に早い波浪予測を行うことができる。従来のシステムでは、実際の波浪観測機器が存在しない地点での波浪観測は不可能であるか、或いは低精度な予測しかできないという制約があったのに対し、本願の波浪予測システムの場合、あらゆる地点の波浪予測を行える。
【0051】
ところで、全国港湾海洋波浪情報網(ナウファス)が提供する有義波高や有義波周期は、海象計または超音波波高計によって海中超音波信号の送受波を計測し、独立行政法人港湾空港技術研究所の波浪データ処理システムによって演算・処理されるため、砕波などによって海面付近に気泡が混入すると、超音波信号にはノイズが混入し、観測波浪データの解析が出来ない場合がある。このような場合、ナウファスは欠測データの扱いをしていた。欠測データの対処方法として、例えば、海象計や超音波波高計に併設される水圧変動測定センサーの測定データを用いて有義波高・周期を推定することが理論的には可能である。しかしながら、その推定のためには観測点毎の観測機器の特性に応じた換算係数の設定が必要なことから、これまでは、事後の解析時に責任技術者がその都度換算係数の設定を確認しながら、水圧変動記録をとって評価していたに過ぎず、リアルタイムで取得できるデータの範囲は制限があった。これは、超音波信号にノイズが混入しやすく、かつ一層リアルタイム性の波浪情報が要求される高波浪時において不都合な問題として顕在化した。このため、ナウファスには、水圧変動から有義波高・周期をリアルタイムで自動推定するシステムが導入され、超音波信号にノイズが混入した場合に捕捉表示を行う機能が付加されている。ただし、水圧変動記録を用いたデータの自動捕捉は低波浪時には信頼性が低くなる欠点を有するため、有義波高推定値が0.5m未満の場合には行なわれておらず、水圧変動記録にノイズが含まれてしまう場合は依然として欠測データのままである。
【0052】
したがって、本願発明の波浪予測システム100は、ナウファスなどの従来の波浪予測が成しえなかった任意の地点の波浪予測をリアルタイムで行うことを実現する唯一の技術である。本波浪予測システム100によれば、波浪災害発生時、あるいは災害が予想される時点において、波浪がどのような状況になっており、これからどの程度継続するか、どのように変化するか等、現在および数時間先の状況を高精度かつリアルタイムで把握することができる。
【0053】
さらに、本発明の別の目的は、波浪予報を高精度且つリアルタイムで分かり易くユーザに呈示することのできることにある。波浪予報データは、自治体や企業が港湾・海洋工事における海上事故の防止やリスク軽減、海上交通における安全航行の補助といった高波災害の対策のために利用するにとどまらず、一般人のマリンレジャーにおける海浜事故や事故防止又はリスク軽減を図るために活用されることが有用である。そこで、波浪予測システム100で計算した波浪予報データを配信する方法について説明する。
【0054】
波浪予測システム100の情報配信部5は、波浪予測部3から波浪予測情報を受け取ると、インターネットなどの通信回線14を介して或いは無線で任意の情報端末11,12や携帯電話13などに対して波浪予測情報を送信する。例えば、情報端末11,12の各種Webサイト、携帯端末13上のi-mode(登録商標)、EZweb、Yahoo!Keitaiなどインターネットの各種接続サービスにおいて、ユーザの簡易な操作を通じて波浪情報が取得される。
【0055】
解析結果をどのような表示形式で提供するかは、ユーザの波浪情報に対する要求内容に依存する。例えば、常に自分の現在位置或いは今後の移動地点のみの波浪情報が分かればよいというユーザがいる一方で、自分のいる地点を含めた或いは自分の位置とは無関係に、より広領域での波の様子を知りたいというユーザもいる。このため、ユーザの現在位置を自動探知すること、所望の地点をピンポイントで指定したり地図上で指示できること、現時点のみならず一定時間の波の様子の経時変化を視覚的に捉えたいといった要求に応じられるようにすることが望まれる。
【0056】
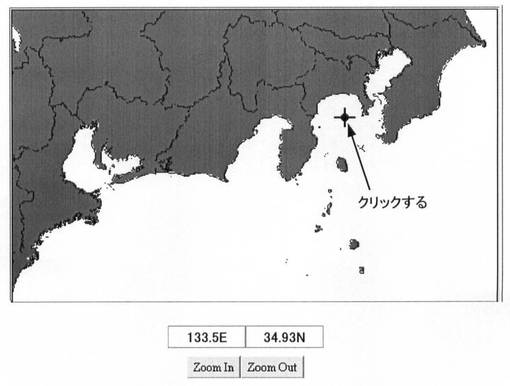
そこで本実施形態の情報配信部5は、全地球測位システム(GPS)付きの携帯電話向けにGPSによるピンポイントエリア用データ配信、及び主に一般のパーソナルコンピュータ向けにユーザの任意指定箇所用データ配信を可能にする処理を行う。また、配信されるデータは、緯度及び経度で特定される位置情報に対応する波浪予報データをテキスト形式で直接検索できるとともに、ユーザが情報を容易に把握できることを考慮して上記いずれのデータ配信においてもアニメーション表示が可能な構成にした。図10は、パーソナルコンピュータ上でユーザが地図上の任意の地点を指定し、当該地点の波浪情報をバーチャル(仮想)ブイとして表示している。このバーチャルブイとは、本発明が、実際の波浪観測機器が設置されていない地点にあたかも当該観測機器が存在し、波浪予測を行っているとみなせることから名付けたものである。
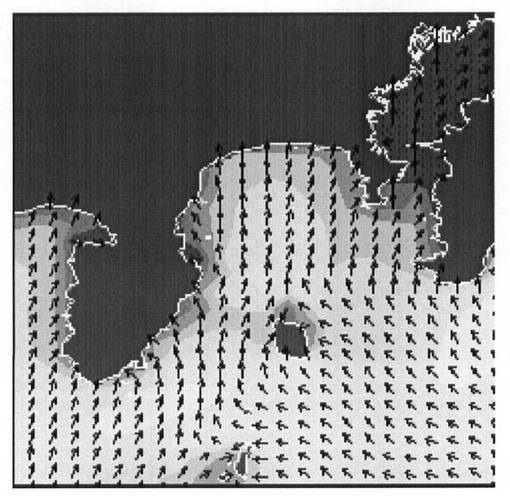
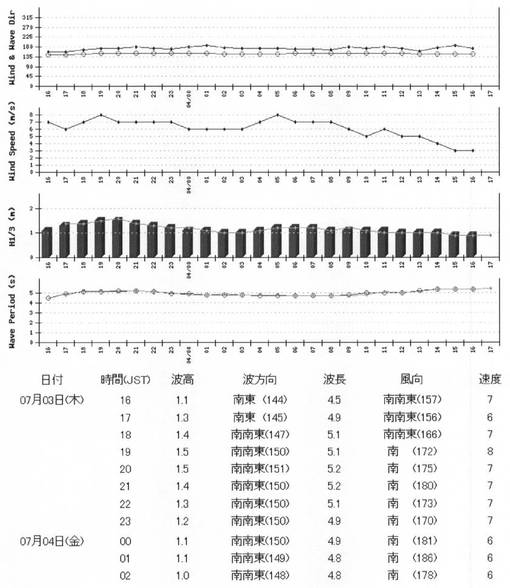
また、図11は、携帯電話又はパーソナルコンピュータ上で解析後の風の向きをアニメーション表示した際の一瞬間を示した例である。さらに、図12は、波の高さ及び周期などを一定期間における経時変化がわかるようにグラフ化した例である。同図下部には、具体的な数値データをあわせて表示している。
【0057】
本願発明の場合、波浪予報の速報性、すなわちリアルタイムにデータを提供する必要がある。このため、本実施形態の波浪予測システム100は、波浪予測データをアニメーションやバーチャルブイで表示するのに要する画像処理時間をできるだけ削減することが要求される。図5又は図2〜4の第2ステップのリアルタイム推算が毎正時に反復されることから、情報配信部5が波浪予報データをテキストデータのままで波浪予測部3から受け取り、且つこれをそのまま利用するとなると、処理時間が長くなり、毎正時ごとに解析した最新の予報情報をアニメーション表示等することができなくなる恐れがある。上述したように、波浪予測システム100は、従来のスーパーコンピュータを使用することなく、市販の低廉なハードウェアによるクラスターコンピュータにより構築しているので、極めて高速な処理プロセッサが搭載されていなくてもリアルタイム性が維持できる短時間の画像処理を実現したい。
【0058】
そこで、画像表示のためのデータ加工処理を行うように工夫を施した。その手順を示すのが図13である。
波浪予測システム100の波浪予測部3は、SWAN6を用いて計算した波浪予測値を、緯度及び経度情報に関連したテキストデータで出力するので、画像描画ソフトウェアプログラムがこのテキストデータを入力し、画像データを生成する必要がある。通常の描画ソフトの場合、描画対象として指定された地点又は領域の緯度・経度に関連付けられた波浪予測テキストデータは、画像描画ソフトウェアプログラムに直接インプットされ、レンダリング処理が行われる。この方法で画像を生成しようとすると、一つ一つの地点の緯度・経度をもつテキストデータがテキストデータファイルから連続して読み出された後に、描画のための処理が繰り返されることになる。したがって、テキストデータファイルは標準的な指定領域で例えば約47MBも要するし、画像処理用のメモリの使用量が非常に大きく且つ連続して使用されることから、波浪予測の1エリア(約165km×330km四方)で1枚の画像生成のために要する所要時間は少なくとも3分を必要とする。しかも波浪予測部3で使用するサーバとは別の専用サーバを準備することになる。そうすると、日本近海のために必要とされる10エリアの画像生成を行うとすれば、30分以上の時間が費やされてしてしまう。これでは、波浪予測部3が毎正時にGPV風データを受信し、波浪予測値の修正を行うために要する時間と合わせると、日本近海を網羅した画像表示を毎正時内に配信することが実際上は不可能となってしまう。本発明はデータ変換部4によるソフトウェア処理の工夫でこの問題に対処している。
【0059】
データ変換部4は、解析機能を有する描画ソフトGrADS(The Grid Analysis and Display System)を採用して描画時間を短縮することを想定している。この描画ソフトは、格子状に配列された4次元データを2次元描画する気象用の可視化ツールであり、データセット内に描画データを格納して準備しておけば、コマンドの入力に従い描画を容易に実現できる。また、GrADSは、通常の描画ソフトには無い解析ツール機能を有するので、例えば組み込み関数の結果を直ちに画像化することができるものの、一方で格子データ以外の任意の書式のデータを扱うことができない。つまり、SWAN6で求めた波浪予測テキストデータは、GrADSの処理で直接あつかうことができず、一旦、テキストデータを格子データに変換する必要がある。従来の波浪又は気象予報システムは、このデータ変換の問題が大きな障壁となって、GrADSを用いたリアルタイム画像生成を行うことができなかった。
【0060】
本願では、テキストデータを格子データへ自動変換する機能を開発し、上述した問題を解決した。コストと処理時間を度外視すれば、テキストデータをGrADS用の格子データに自動変換させる機能を有するシステムを開発することは容易であろうが、本願発明では、毎正時内に画像データをユーザに配信するニーズがあるために、前工程である波浪予測部3の演算後、およそ6〜7分以内にはすべての画像生成処理を終了させるという制約が存在する。そのために、特にテキストデータを格子データに変換するプロセスの処理速度を、限られたハードウェア性能にもかかわらず、可及的に実行する必要がある。そこで、図13に示すとおり、一般的な変換の処理手順とはまったく異なる独自の方法を案出した。
【0061】
図13に示す、テキストデータから格子データへの自動変換処理について説明する。
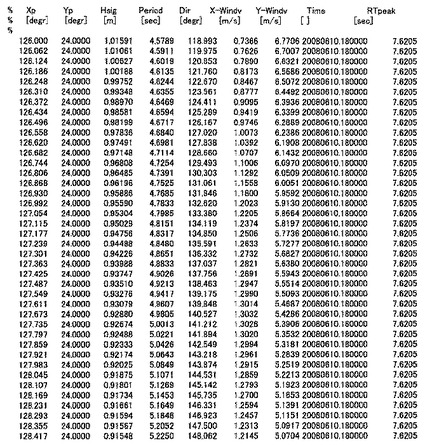
まず、SWANが出力するテキストデータファイルにデータ欠損等がないかをエラーチェックする(ステップ70)。そして、このテキストデータファイルの数のカウントと、ファイル名の付与又は調整を行う。SWANが出力するテキストデータファイルの中身の一例を図14に示す。左から1列目のデータ項目は経度、2列目のデータ項目は緯度をあらわす。図14に示すテキストデータファイルには、緯度が24degreeのデータが格納されているが、例えば、1つ目のテキストデータファイルには21〜30degreeの緯度データに関係するSWAN出力値、2つ目のテキストデータファイルには31〜40degreeの緯度データに関係するSWAN出力値、…というように、SWANが解析して出力するデータが複数のテキストデータファイルに格納されるようになっている。そこで、1つ目のテキストデータファイルのデータを読み込んで、そのテキスト情報(波高、波向、周期)からGrADS用の格子サイズを決定しておく(ステップ71)。
【0062】
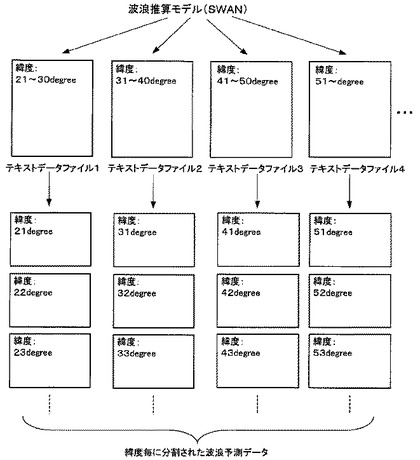
次に、各テキストデータファイル内のデータを緯度毎に分割して、それぞれ個別のバイナリーファイルを作成する(ステップ73)。複数のバイナリーファイルは同一の緯度でまとめられているので、分割されたファイル内のテキストデータを1列ずつ処理していくと、GrADSの或る1つの緯度に関するすべてのテキストが一括して格子データに変換される(ステップ75)。これをステップ72で特定した分割ファイル数の分だけ反復する(ステップ74)。上述したファイル分割の流れを模式的にあらわしたのが図15である。
【0063】
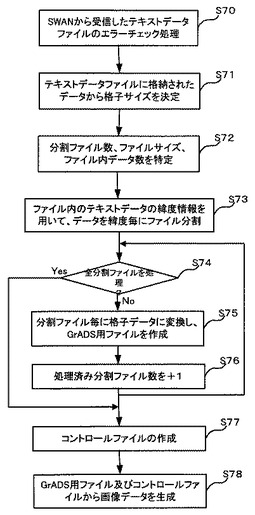
なお、テキストデータファイルは、データの内容や格納順など、一切の属性情報を有していない。そこで、テキストデータファイル内のデータに関する情報は別個のコントロールファイル内に定義しておき(ステップ77)、GrADSはコントロールファイルの情報に基づいてこのテキストデータファイルを読み出して格子データに変換し、描画画像を生成する(ステップ78)。
【0064】
このように、本発明は、SWANによって波浪予測されたテキストデータをGrADSで読めるようにするため、テキストデータファイルを変換する際に、緯度・経度ごとで関連づけられ記述されているファイル内の波浪予測データを、いったん緯度を基準としたデータリストに整理するために緯度毎のファイルに分割することを特徴とする。このような緯度を共通する波浪予測データをもつファイルに整理することで、小口化されたファイルごとに格子データへの変換処理を行うことが可能となり、一回の変換処理に要するメモリの負荷が大幅に削減される。従来は全緯度同時で計算していたところを、小口化された全てのファイルの変換処理が同様な方法で繰り返されるようにループさせると、変換の全工程を通じてメモリ使用量の低い状態が維持され、メモリの処理効率を大幅に向上させることができる。データ変換前のテキストファイル容量47MBは、変換後は12MBのバイナリデータファイル容量となり、およそ25.5%にまで削減される。完成した画像ファイルは、PC向けで35KB、携帯端末向けで12KBにまで容量が削減されることを確認できた。なお、本実施形態では、データを緯度毎でまとめてファイル分割し、格子データの変換を行う場合を説明したが、同一の経度を有するデータでファイル分割しても同様の作用効果を得られる。
【0065】
また、情報配信部5による緯度データ毎のファイルの作成→緯度データ毎の一括計算という一連の処理は、例えば、C言語等で作成した変換プログラムの実行で自動的に行うことが可能である。これにより、波浪予測部3がSWAN6を用いて解析した波浪予報データ、すなわち緯度・経度で配列されたテキストデータが、任意のメッシュ間隔(例えば、2〜5km)の格子データに自動的に変換され、GrADSに適したデータファイルを低工程数かつ迅速に生成することができる。
【0066】
上述した一連のデータ変換の所要時間は、LINUXのOSを搭載するPentium(登録商標)IVプロセッサレベルのパソコン1台で動作させた場合、約165km×330km四方の1エリア(画像1枚)で約30秒以内に終了し、従って日本近海を網羅する10エリアを合計しても最大約5分でユーザに配信することができる。すなわち、上述した画像データを描画する前にソフトウェア処理によるデータ変換処理を行っておくことで、画像生成ソフト用に高性能且つ高価な専用サーバを調達することなく、波浪予測データをユーザにリアルタイムで配信し表示することができる。波浪予測システム100の一部を使用できる範疇、すなわちLINUXのOSを搭載したPentium(登録商標)IVプロセッサレベルのパソコン1台をハードウェアとして準備するだけなので、初期費用及びランニングコストを格段に抑えることが可能となり、多くのユーザに高精度で且つわかりやすい気象情報サービスの提供を実現できる。
【0067】
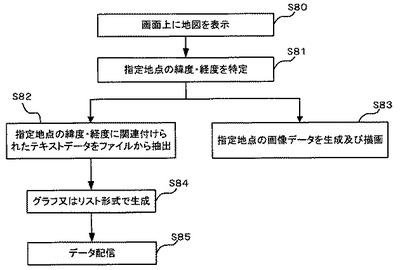
さらに、上述した、画像データから任意地点の情報をグラフで表示したり、テキストで一覧表示する方法について情報配信部が行う処理を以下に説明する。図16はその手順を示したフローチャートである。
まず、情報配信部は、PC又は携帯電話などの表示画面に地図を表示させる(ステップ80)。この段階での表示は、通常は、広範囲な領域を描画しておくのが好ましい。次に、ユーザがこの地図上の任意の箇所をクリック指定することを受けて、当該指定地点の経度及び緯度を特定する(ステップ81)。そして、指定された領域の画像データを生成し、描画する(ステップ83)。画面上には、指定領域及びその周辺領域のみを描画すればよいので、ステップ80での表示スケールよりも拡大したスケール値であるのが普通である。
【0068】
一方で、当該指定された地点の緯度又は経度情報に関連づけられた波浪予測テキストデータをデータファイルから読み出し(ステップ82)、グラフ等を表示する(ステップ84)。具体的には例えば、
(a)波浪予測テキストデータの風向・風速・風向データ値を表示したり、これらのデータの一定時間についての経時的変化をグラフで表示する。
(b)指定された地点が複数であれば、当該複数地点の風向・風速・風向のテキストデータを表示したり、それぞれの地点をリスト形式で表示する。
(c)さらに細分化した格子区間の予報画像を抽出し、表示する。
【0069】
本実施形態の情報配信部5による画像データの変換及びデータ配信によれば、ユーザは画面に表示された地図上の任意の点又は範囲をパソコン上で指定したり、携帯電話が備えるGPS機能で現在位置を検出することで、実際の波浪観測機器の存在とは無関係に任意の地点又は領域について、それらの波高、波向、周期等の波浪データを短時間で描画することができる。この場合、過去から現時点の状況、或いは数時間先の状況を時系列に示すことで、災害発生時或いは災害が予想される時点において現在波浪がどのような状況になっており、これからどの程度継続し、どのように変化するのかをユーザに提供できる。しかも、地図上でアニメーションによって表わすことで、ユーザにわかりやすく表示することもできる。このようなデータ配信及びデータ表示は、従来の波浪予測システムでは実現されていなかったものである。
【0070】
これまでは主に国や自治体等が海上交通や港湾・海洋工事における海上事故の防止のために波浪予測データが特定の方法でデータ提供されていたが、本実施形態の波浪予測システム100により、個人経営の沿岸漁家や、マリンレジャー・マリンスポーツ参加者にも、高精度な波浪予測データを迅速、簡便、且つ低価格で提供することが可能となる。その結果、多くの地域住民が波浪情報を能動的に取得して、海上交通における安全航行の補助、海難事故の防止・軽減などの低減に大きく貢献することができるようになる。
【0071】
なお、本発明の目的は、波浪予測システム100の機能を実現するソフトウェアのプログラムコードを記憶した記憶媒体を、システム或いは装置に供給し、そのシステム或いは装置のコンピュータ(又はCPUやMPU)が記憶媒体に格納されたプログラムコードを読みだして実行することによっても達成される、ことは言うまでもない。
この場合、記憶媒体から読み出されたプログラムコード自体が本実施形態の機能を実現することとなり、そのプログラムコードを記憶した記憶媒体及び当該プログラムコードは本発明を構成することとなる。
プログラムコードを供給するための記憶媒体としては、ROM、フレキシブルディスク、ハードディスク、磁気ディスク、光磁気ディスク、コンパクトディスクROM(CD-ROM)、CD-R、CD-RW、デジタル多機能ROMドライブ(DVD ROM)、磁気テープ、Zipドライブ、フラッシュメモリカード、メモリスティック、揮発性メモリ及び/又は不揮発性のメモリカード等を用いることができる。揮発性メモリは、例えば、ランダムアクセスメモリ(RAM)、シンクロナスRAM(SRAM)、ダイナミックRAM(DRAM)、シンクロナスDRAM(SDRAM)、ダブルデータレートSDRAM(DDR SDRAM)、及びダイレクトRAMバスRAM(DRRAM)を含む。不揮発性メモリは、例えば、読出し専用メモリ(ROM)、プログラム可能読出し専用メモリ(PROM)、電気的プログラム可能読出し専用メモリ(EPROM)、電気的消去可能プログラム可能読出し専用メモリ(EEPROM)、及びこれらに類するものを含む。
【0072】
また、コンピュータが読みだしたプログラムコードを実行することにより、本実施形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼動しているOS等が実際の処理の一部又は全部を行い、その処理によって本実施の形態の機能が実現される場合も含まれる。
さらに、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された拡張機能ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部又は全部を行い、その処理によって本実施形態の機能が実現される場合も含まれる。
【図面の簡単な説明】
【0073】
【図1】本発明による方法を実現する一実施形態としての波浪予測システム及び関連する周辺機器の全体構成図である。
【図2】波浪予測の処理内容を示したフローチャートである。
【図3】波浪予測の処理内容を示したフローチャートである。
【図4】波浪予測の処理内容を示したフローチャートである。
【図5】波浪予測の処理内容を示したフローチャートである。
【図6】外側領域及び内側領域に関する波浪予測の結果の一例を示す図である。
【図7】波浪予測処理の第2ステップの風データ処理の内容を模式的に表した図である。
【図8a】本発明による波浪予測値の評価結果を示すために、十勝の波浪予測結果及び観測結果を示す図である。
【図8b】本発明による波浪予測値の評価結果を示すために、むつ小川原の波浪予測結果及び観測結果を示す図である。
【図8c】本発明による波浪予測値の評価結果を示すために、輪島の波浪予測結果及び観測結果を示す図である。
【図8d】本発明による波浪予測値の評価結果を示すために、金沢の波浪予測結果及び観測結果を示す図である。
【図8e】本発明による波浪予測値の評価結果を示すために、鳥取の波浪予測結果及び観測結果を示す図である。
【図9a】十勝の有義波高に関する予測値及び観測値の比較を示す図である。
【図9b】むつ小川原の有義波高に関する予測値及び観測値の比較を示す図である。
【図9c】輪島の有義波高に関する予測値及び観測値の比較を示す図である。
【図9d】金沢の有義波高に関する予測値及び観測値の比較を示す図である。
【図9e】鳥取の有義波高に関する予測値及び観測値の比較を示す図である。
【図10】波浪予測情報をユーザに提供するインタフェースの一例を示す図である。
【図11】波浪予測情報をユーザに提供するインタフェースの一例を示す図である。
【図12】波浪予測情報をユーザに提供するインタフェースの一例を示す図である。
【図13】画像表示のためのデータ加工処理の手順を示すフローチャートである。
【図14】テキストデータファイルの中身の一例を示す図である。
【図15】テキストデータファイルを分割する処理により分割ファイルが生成される様子を示す図である。
【図16】波浪予測情報をグラフ又は一覧表示等するときの処理手順を示すフローチャートである。
【符号の説明】
【0074】
1 データ格納部
2 データ受信部
3 波浪予測部
4 データ変換部
5 情報配信部
6 波浪推算プログラム(SWAN)
7 局地気象予測プログラム(WRF)
8 大気解析モデル
9 気象予報モデル
10,14 通信回線
【技術分野】
【0001】
本発明は、波浪の状況をリアルタイムに予測し、高波・暴浪災害に対して迅速且つ適確な情報、及び当該情報に基づく指示又は対策を提供するシステムに関するものである。
【背景技術】
【0002】
近年、気象や波浪の観測データを処理し、閲覧できるインフラが整備され、得られたデータを波浪予報のために提供する仕組みが複数の機関を通じて展開されるようになってきた。例えば、気象庁は、波浪予報や、全国12ヶ所ほどの気象庁波浪ブイからの観測データをホームページ上で誰もが自由に検索できる形態で提供している。国土交通省からも同様な情報提供が行われており、例えば、防災情報センターのホームページからは潮位および波高の観測データを閲覧することができたり、国土交通省港湾局の全国港湾海洋波浪情報網(ナウファス)では、波浪ブイを設置した全国52の観測所から送られた有義波実況や周期帯波浪のデータをダウンロードすることもできる。
【0003】
気象・波浪などに関する情報提供において特に考慮しなければならない点が、情報配信のリアルタイム性である。行政は、災害気象・水害事象が刻々と間近に迫り来る地域の早期警戒を行って的確な避難対策を決定し、住民に迅速な指示を出すことが重要である。また、水害や海難事故を未然に防止するには、住民やユーザが主体的になって現況をリアルタイムで把握できるようになっていることが災害の被害を小さくすることにつながる。このような観点で生み出されたシステムの一つが、(財)沿岸技術研究センターによる情報配信システムのカムインズ(COMEINS)であり、全国港湾海洋波浪情報網(ナウファス)の波浪観測情報を気象情報と統合して気象・海象に関する情報をオンライン・リアルタイムで提供している。
なお、非特許文献1は、気象モデルと浪波モデルを用い、波浪を計算する方法の概要と数点の観測値との比較が示されている。
【0004】
【非特許文献1】間瀬ら他4名,GFS-WRF-SWANシステムによる3シーズンの波浪予測とシステムの検証,海洋開発論文集,第22巻,pp.109-114, 2006.
【発明の開示】
【発明が解決しようとする課題】
【0005】
従来のリアルタイム波浪予測技術の場合、波浪予測のための計算と、波浪観測のための観測とがそれぞれ別個のシステムによって行われており、その結果は、それぞれのシステムから独立した波浪情報として一般に閲覧されたり、更なる分析のために提供されるようになっている。つまり、過去に予測した数値を最新の観測値で自動的に補正するというような連携は図られておらず、高い信頼性を担保したリアルタイム波浪予測になっていない。高信頼度のリアルタイム波浪予測とは、得られた予測データをそのつど補正しながら、最新の波浪予測データに更新し続けることである。仮に、波浪予測情報を知りたい一般ユーザが観測データについて独自に判断しなければならないとすると、刻々と変化する災害時の現況把握や予測を適確に行うことはできない。一方で、専門家によりデータ分析がなされ、修正後の予測データが提供されるまで待っていたのでは、これまでと同様に、実際の災害危険への対応を迅速に行うことは難しい。現に、災害の備えや対応の判断が遅れたために過去に繰り返して深刻な被害が起きている。複数のシステムからの気象情報が有機的に連携又は統合され、その結果、高信頼度のリアルタイム波浪予測が実現されなければ、事前の対策で本来防止できる災害の危険性を解消できないことが指摘されている。
【0006】
上記カムインズ(COMEINS)は、国土交通省港湾局とは別組織の気象庁が提供する波浪予測システムにより演算された結果を取り込んで、ナウファスの波浪観測情報と合体させてから独自の処理を行う。しかし、予測値が更新されるのは1日あたり2回でしかなく、オンライン・リアルタイム予報システムというものの、真のリアルタイム予報になっていない。実況観測データを基に小刻みで予報値を修正し、まさに現時点の様子から推測される数時間先の予報を可能な限り実際に近似させてタイムリーに提供するという形態にはなっていない。なお、上記非特許文献1もリアルタイム予報についての記述はない。
【0007】
また、上述した国内最大の波浪観測網である全国港湾海洋波浪情報網(ナウファス)は、観測機器が設置されている全国52ヶ所の観測点に限っては観測データをリアルタイム情報として取得し、緊急時の速やかな状況把握の基本データとして活用することができる体制にはなっている。しかし、52ヶ所の観測点以外の場所については、現況を観測する手段を有していない。この対策として、重要地点とみなせる観測空白地点に、新たな投資によって多数の観測機器を設置することが考えられる。しかしながら、多数の地点に設置した観測機器からのデータを用いてリアルタイムな波浪観測を実現する構想は予算的に厳しく、現実的には不可能といえよう。例えば、独立行政法人防災科学研究所の波浪観測ブイは、相模湾唯一の波浪観測ブイとして1965年より神奈川県平塚沖に設置され、海浜・沿岸災害の軽減に幅広く寄与してきたが、その老朽化が進んだこともあって、独立行政法人整理合理化計画(平成19年12月24日閣議決定)に基づき、平成20年3月末をもって廃止されることとなった。この波浪観測ブイの運用費は、漁業保障費だけで年間4000万円にも達していたといわれている。さらに、観測ブイは観測データ送信システムの故障や、観測ブイの機械的な故障または高波による故障や破損などのリスクが高く、点検・修理費用も発生する。具体的には、精密機器としての観測ブイ1基の年間リース料は約500万円、保守費は約900万円かかり、他にも通信装置・配信装置に数千万円の諸経費が必要である。さらには、収集した各所データを解析し、予測データを計算する波浪処理システムに用いるスーパーコンピュータは、全国の沿岸の解析を行うために莫大なランニングコストを必要としている。
【0008】
したがって、全国52箇所のナウファス観測点や全国12箇所の気象庁波浪計が設置された以外の場所も網羅しながら、いつでもどこでもリアルタイムな波浪観測を実現することは経済上不可能であり、数時間先の状況を把握するための波浪予測をリアルタイムで継続的に行える場所は、自ずと限定されてしまっている。
【0009】
既存観測点以外の場所の現況を知る他の手段としては、既知のデータを基に演算により類推する方法がある。具体的には例えば、既存観測点を結ぶ内側の領域については、周辺の既存観測点から得られる過去のデータ或いはリアルタイム情報を内挿(補間)することによって推測することが挙げられる。しかしながら、この演算によって値を推測する方法にしてもコスト面又は演算時間の制約が大きく、現実の問題解決策には成り得ないままであった。
【0010】
そこで、本発明は、実際に観測データを得ることができる波浪観測ブイの設置場所に限定されることなく、任意の地点に関する波浪予報を高精度且つリアルタイムで分かり易くユーザに呈示することのできる技術を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の波浪予測システムは、第一推定値の気象予報値を観測値で修正した大気解析データと、海洋の波浪状態を予測する波浪推算プログラムとを利用して海洋の波の諸量を予測する波浪予測システムであって、所定の時間間隔で得られる前記大気解析データから風向及び風速データを抽出するデータ受信手段と、前記大気解析データに含まれる風向及び風速データを基に、N時の所定時間(α)前の時点(N-α)からN時の間をデータ補間することによってN時の波浪データを推算し、当該推算データ値をN+α時の波浪予測のための初期条件値として前記波浪推算プログラムに設定して、N+α時の波浪を予測する波浪予測手段とを有し、前記データ受信手段が、更新後の新たな大気解析データの風データを所定時間間隔(α)で受信するたびに、前記波浪予測手段は、当該更新後の風データによるデータ補間に基づき推算した波浪データ値を、次のα時間後の波浪予測の初期条件として前記波浪推算プログラムに再設定して前記所定時間(α)経過後の波浪予測を繰り返すことにより、時間経過に伴う波浪状態の変化予測データに誤差拡大がないようにすることを特徴とする。
【0012】
また、本発明の波浪予測システムの前記データ受信手段は、地球全体の大気の状態変化を数値的に計算し地球規模での気象変化を予測計算した全球気象予報データを更に受信し、前記波浪予測手段は、前記全球気象予報データに含まれる風向及び風速データを前記波浪推算プログラムに入力して演算した広領域波浪予報データを、前記所定時間間隔(α)ごとに繰り返される波浪予測のための領域境界条件として前記波浪推算プログラムに設定することを特徴とする。
【0013】
また、本発明の波浪予測システムの前記波浪予測手段は、前記波浪推算プログラムに対し、前記広領域波浪予報データを前記広領域内の局所領域の境界条件として設定し、さらに、メソスケールの気象変化を予測する局地気象予測プログラムを用いて求めた前記局所領域の風データを初期条件として設定して前記局所領域の波浪予測を行うこと、さらに、前記大気解析データに含まれる風向及び風速データをデータ補間することにより推算されるN時の波浪データと、前記初期条件として設定されるN時の波浪予報データとをデータ同化処理した結果を前記初期条件とすること、さらに、前記波浪予報データを画像データとして表示するためのデータ変換手段をさらに含み、データ変換手段は、前記波浪推算プログラムを用いて推算された波浪予報データを緯度又は経度の値によって分類して、同一な緯度又は経度を有する波浪予報データが1つの単位となるように管理又は記憶媒体に記憶し、当該1つの単位ごとに画像描画ソフトウェア用のデータフォーマットで変換することを特徴とする。
【発明の効果】
【0014】
本発明によれば、第一推定値の気象予報値を観測値で修正した大気解析データに含まれる風向及び風速データを基にデータ補間してN時の波浪予報データを推算すると、これをN+α時の波浪予測のための初期条件値として波浪推算プログラムに設定し、N+α時の波浪を予測する。そして、大気解析データが更新される所定時間間隔(α)ごとに本処理を繰り返し実行するので、時間経過に伴う波浪状態の変化予測データに誤差拡大がなく、これにより、波浪予報データの精度を実際の波浪観測ブイによる観測値と同程度にまで向上させることができる。
【0015】
また、本発明によれば、地球規模での気象変化を予測計算した全球気象予報データや、さらには局地気象データの風データを波浪予測に用いるので、対象とする地域の地形情報を詳細に取り込んで解析した波浪予報データを出力することが可能であり、実際に観測機器が設置されていない地点を含むあらゆる地点の波浪データを精度良く算出することができる。したがって、物理的な観測機器及びその運用に関する高額な費用を削減し、高精度な波浪予報データをユーザに対して安価に提供することが実現される。
【発明を実施するための最良の形態】
【0016】
以下、図面を参照しながら本発明のリアルタイム波浪予測システム(以下、「波浪予測システム100」という。)の一実施形態について説明する。図1は、波浪予測システム100及び関連する周辺機器の全体構成を示すものである。本発明のために開発した波浪予測システム100は、データ受信部2、データ格納部1、波浪予測部3、データ変換部4、及び情報配信部5を含む構成である。波浪予測システム100は、気象庁に関連する(財)気象業務支援センターの毎時大気解析モデル8から提供されるデータ(略して「GPVデータ」と称する。)、及びアメリカ環境予報局(NCEP:National Centers for Environmental Prediction)の全球気象予測システム(GFS:Global Forecasting System)9が解析した気象データ(略して「GFSデータ」と称する。)をインターネット等の通信回線10を介してデータ受信部2により受信し、データ格納部1に格納する。
【0017】
波浪予測部3は、デルフト工科大学で開発された第3世代波浪推算モデル5(SWAN:Simulating WAves Nearshore)を用いて波浪予測計算を行う。波浪予測部3は、予測計算のためにデータ格納部1に格納されたGPVデータやGFSデータを用いる。
この全球気象予測システム(GFS)9は、気象データを全球にわたり、緯度方向に768、緯度方向に384に区切ったメッシュ格子点で気象予測解析を実行する。解析結果は、緯度・経度方向にそれぞれ1度間隔の地点(約100kmメッシュ)における3時間毎の384時間先までの予測データとしてWeb上にロードされ、1日4回(00,06,12,18(UTC):協定世界時)更新されるようになっている。そこで、波浪予測システム100の波浪予測部3は、全球気象予測システム(GFS)9から入手できるGFSデータ(気圧、風向・風速、気温、降水量、雲量など)のうちの3時間毎の風向及び風速データを使用する。なお、GFSは太陽放射が熱源となって生じる地球放射、対流、降水、内部重力波を精巧に気象モデルに取り込み、気圧風向・風速、気温、降水量、雲量等の予測データを、NCEPのWebサイトからインターネット回線を通じてダウンロードすることができるようになっている。
【0018】
ところで、波浪予測は、陸上地形や岬などの周辺地形による影響を少なからず受ける。このため、第3世代波浪推算モデル(SWAN)6が、全球気象予報システム(GFS)9で解析されたメッシュ格子点の風予報データをそのまま使用しても、波浪予測値が実際の観測値に一致していると評価できるまでに予測精度を上げることが困難である。そこで、アメリカ大気研究局(NCAR:National Center for Atmospheric Research)によって開発された局地気象予測モデル(WRF:Weather Research Forecasting model)6を用いて、全球気象予報モデル(GFS)9の対象地域をダウンスケールさせて予測精度の向上を図ることが有効である。局地気象予測モデル(WRF)7を用いた波浪予測の場合、地球の熱循環の駆動力として働く対流にも着目することになり、メソスケール(数km〜数千km)で発生する対流現象をとらえた風データを用いて波浪予測の演算を行うことができる。
【0019】
データ変換部4は、波浪推算モデル(SWAN)6を用いて演算された波浪予報データを、アニメーションなどの画像表示に適したデータ形式に変換する。本実施形態の波浪予測システム100は、波浪予測した結果を多くのユーザに共有してもらうことで災害防止やマリンレジャーに役立てることを目指しており、ユーザが理解し易い画像表示になるようデータ配信することが必要である。しかしながら、SWAN5からのデータは、波浪予測の結果を画像表示の形式で短時間に配信できるようになっていない。そこで、データ変換部4により、画像処理時間をできるだけ少なくするのに有効なデータ変換をする。
情報配信部5は、上記データ変換された波浪予報データを、インターネットや専用回線などの通信回線14と接続する情報端末12に送信する。なお、専用回線で特定の情報端末11や、無線通信で携帯端末13などの各種情報端末に送信してもよい。
【0020】
ここで、本波浪予測システム100の具体的な装置構成について説明する。
日々の気象変化は、風や気温、湿度などの複数の物理量による影響を受けるので、その予測も複雑にならざるをえない。一方で、これらの物理量の時間変化は、いくつかの基本的な物理法則によって支配されており、それらの支配方程式を解くことで気象解析が可能になる。一般に、気象モデルを用いた地球環境シミュレーションがそうであるように、気象情報を解析するには超高性能なスーパーコンピュータを準備して、上述した複雑な支配方程式の解を求める。しかし、そのようなスーパーコンピュータは極めて高価であり、国立や政府などが関与する一部の公的機関でしか調達することができないものである。
【0021】
本実施形態では、気象庁8や米国環境予報局9から入手可能な気象解析結果を利用することでスーパーコンピュータを自前で調達することを不要にし、スーパーコンピュータに代わるパソコンシステムとしての Class I Linux Beowulf クラスターコンピュータシステムを採用した。クラスターコンピュータ上でオープンソースの気象予測モデルシステムを実行して波浪解析を行い、任意の地点の風情報および波情報を高精度且つリアルタイムで予測するシステムを実現するものである。なお、以下の理由により、Class I Linux Beowulf クラスターコンピュータシステムを選択した。
1)市販のハードウェアでクラスターコンピュータシステムを組むことができ、Ethernet(登録商標)やその他のネットワークに接続可能である。
2)上述したWRF6やSWAN5を、メモリ分散型の並列計算を行うためのMRI規格を実現したライブラリーであるMPICHを使って並列計算を行うことができる。
3)従来のスーパーコンピュータの価格/パフォーマンス比と比較すると、約3倍〜10倍の向上が見込める。
4)GNUオープンソースライセンス下でのオペレーティングシステムやソフトウェアを利用することが可能である。なお、オペレーティングシステムは、MPICHを備えたFedora Linuxとした。
【0022】
次に、本実施形態の波浪予測システム100による波浪予測の処理内容について図2〜図5のフローチャートを使って詳細に説明する。
図2に示す処理は、波浪予測部3が、GFSデータの更新があるたびにN時までの波浪予測を行う第1ステップと、第1ステップでの波浪予測を予測対象領域の境界条件としながら、かつ、GPV風データを用いて予測の初期条件を生成し、波浪予報データを毎正時に修正する一連の処理を示している。
【0023】
(1)第1ステップ(外側領域の波浪予測)
波浪予測システム100が、第1ステップで受信するGFSデータには、全球気象予測システム(GFS)で解析された気圧、風向・風速、気温、降水量、雲量などの384時間先までの気象予測データが含まれている。波浪予測システム100のデータ格納部1は、米国環境予報局9からインターネット等を介してダウンロードした上記GFSデータを格納する。波浪予測部3は、このデータ格納部1から、風向及び風速のデータ(以下、「GFS風予測データ」と称する。)を抽出する(ステップ25)。主として、風向や風速が波浪の変化を左右するからである。
【0024】
次に、波浪予測部3は、GFS風予測データを波浪推算プログラム(SWAN)6に入力して、波浪予測の演算を実行する(ステップ26)。GFS風予測データは、地球全体を対象としているので広範囲な領域の予測データである。本実施形態では、この広範囲な領域を「外側領域」と称し、例えば、北緯5〜55度、東経120〜175度の領域、1度(約100km)メッシュで10分間隔の海底地形データ及び0.5度毎のGFS風予測データを基にした演算がなされる範囲である。
【0025】
波浪予測で用いる波浪予測プログラム(SWAN)の具体的な演算式は、以下のように表される。
ここで、(x,y)は位置座標、tは時間、A(σ,θ)はエネルギー密度を相対角周波数σで除した波作用量、θは波向角度である。CxおよびCyは、それぞれ、xおよびy方向の群速度、CσおよびCθは、それぞれ、相対角周波数および波向角に関する特性速度、UおよびVは、それぞれ、xおよびy方向の流れの速度を表す。また、式(1)の右辺のSは、風エネルギーの移流、波の共鳴干渉によるエネルギー移流、水深で決まる砕波によるエネルギー減衰、および白波によるエネルギー減衰を表すソース項である。
【0026】
図2のステップ26では、GFS風予測データが式(1)のソース項Sの中の風によるエネルギー移流項に入力される。そして、演算結果である外側領域の波浪予報データは、第2ステップにおけるステップ21に渡される。
【0027】
(2)第2ステップ(波浪予報データの毎時修正)
次に、第2ステップの処理について説明する。第1ステップで、波浪予測部3が受信するGFSデータは、1日4回(00,06,12,18(UTC))更新されるので、例えば、00時に入手した後、次の更新データを受信する06時までの間、波浪予測部3は第1ステップで求められた第一推定値としての波浪予報データに対して、逐次、修正を施す。つまり、第2ステップは、第1ステップでの波浪予測値の精度をさらに向上する目的で、気象庁の気象業務支援センター8より毎正時から30分以内に提供される風と気温に関して解析された毎時大気解析(GPV)のうちの風データを使って、N時に至るまでの波浪予測値を求める処理を行う。
【0028】
第2ステップの具体的な処理内容を説明する前に、毎時大気解析(GPV)のデータについて説明しておく。現在、地上から上空に向けて電波を発射し、大気中の風の乱れなどによって散乱され戻ってくる電波を受信・処理することで上空の風向風速を測定する観測装置(例えば、ウィンドプロファイラ)が既にある。毎時大気解析GPVの風データ(風向・風速)は、メソスケールで解析した推定値をウィンドプロファイラなどの観測値で修正させている。解析データでありながら実際の観測値で修正処理が行われているために、メソスケールの実際の観測データを取得したことと等価値である。気象庁のドップラーレーダーやアメダスのデータによるウィンドプロファイラを用いた風情報WINDAS(ウィンダス)、或いは降水ナウキャストなどにおいても、実際の観測データを用いた気象予報を行っている。しかし、これは、波浪大気解析で使用されるような10kmメッシュ3時間毎のモデル格子点で解析された値に対して、近隣地点の波浪観測ブイからの波浪観測データ、即ち、“波”データを内挿することで当該モデル格子点の修正及びモデル格子点以外の地点のデータ予測をする。このため、波浪観測ブイの観測データ数が直接的に予測精度に反映し、上述したように既存の全国59ヶ所にあるナウファス波浪観測ブイ数以上の設置を期待できない現状では予測精度の面から自ずと限界が生じている。そこで、本願発明では、“波”データに代わり、毎時大気解析(GPV)で得られる“風”データを使用する。GPVによる風データは広範囲な領域における連続した大気の流れの状態から把握される観測データである。したがって、仮にドップラーレーダーやアメダスで各地点のスポット的な風データがつなぎあわせられてGPV風データが擬似的に生成されたとしても、GPV風データが本来的に有する広範囲な領域内での連続且つ無矛盾なデータ特性が正確に反映されることは不可能であって、GPV風データの代用にならないことは明らかである。むしろ広領域内からでしか把握されない筈の風データの特性を恣意的に生成してしまうので本願が意図する高精度なデータ予測に悪影響を及ぼしかねない。これに対して、GPV風データは上述したようにウィンドプロファイラなどの観測値で修正されており、非常に高精度なデータである。したがって、GPV風データは波浪予測値の高精度化のためには非常に有益なデータである。
【0029】
第2ステップにおいて、波浪予測部3は、まず、気象業務支援センター8からのN-1時及びN時のGPV風データを受信すると、N-1〜N時の間の風向及び風速データが線形に変化すると仮定し、このN-1時〜N時の間を線形内挿、即ち直線補間して、N時に至るまでの波浪予測値を求める(ステップ20)。波浪予測部3は、このN時までの波浪予測値をSWAN6に入力する(ステップ21)。
SWAN6による波浪予測の演算式は既に第1ステップのところで示したとおりだが、上記式(1)のような偏微分方程式の数値積分に当たっては、計算対象領域の初期の状態(初期条件)と計算対象領域を囲む境界上での条件(境界条件)が必要である。通常、初期条件は、波がまったく無いという条件を用いて、風による波の発達を計算するが、この方法では安定した計算結果を得られるようになるまでに時間(スピンアップ時間)がかかる。そこで、本願の波浪予測システム100の場合、ステップ20で求めたN時の波浪予測状況を初期条件として用いる。このため、スピンアップ時間が非常に短いという利点がある。しかも、境界条件は、GFSの風データを用いて計算される外側領域の波浪の予測結果を用いるので、外側領域から入射するうねりの条件を波浪計算に導入することができる。
【0030】
このように、波浪予測部3は、ステップ20で求めたN時の波浪予測をN+1時の波浪予測のための初期条件とし、そしてステップ26からの境界条件とともにSWAN6に設定して、更新後の新たなGFSデータを受信するまでの間(ステップ23のNo)、毎正時のたびに波浪予測の修正が繰り返し行われる。更新後の新たなGFSデータを受信する時間の近くになると(ステップ23のYes)、処理は第1ステップに戻って新たなGFSデータを受信し(ステップ24)、上述した処理が繰り返される。
【0031】
なお、式(1)の左辺の第1項は時間発展を記述する時間微分項であるが、時間が進むごとに波作用量Aが更新されることを意味している。波作用量Aの時間変化は、式(1)の右辺のソース項Sに含まれている風エネルギーを外力エネルギーとして発達・減衰するが、そのほかにも波の力学特性に基づくエネルギーの出入りがソース項Sに含まれており、そのエネルギーのやり取りの結果、N+1時の波作用量Aが求められる。そして、計算された波作用量Aから波高、周期、波向等の諸量が求められる。
【0032】
より具体的な一事例で説明すると、2:00の時点で1:00及び2:00のGPV風データを線形内挿して得られる2:00に至るまでの風データを、SWAN6に代入して式(1)に基づき実行する。そして、得られた2:00の計算結果が1時間後である3:00の波浪予測値のための初期条件として適用され、かつ、2:00の時点のGPV風データがその後の1時間は不変であるという条件下で、3:00に至るまでの波浪予測値がSWAN6により求められる。同じように、4:00までの波浪予測は、3:00と4:00でのGPV風データから3:00に至るまでの風データを線形内挿して求め、これを3:00の時点のGPV風データとともにSWAN6に代入することで4:00までの波浪予測値を算出する。このように、5:00までの波浪予測、6:00までの波浪予測が、それぞれに1時間前からのGPV風データと、当該時刻までに予測修正された波浪予報値から推算される。6:00の予測値は、毎正時のたびに実際値に近似するように修正が積み重ねられた最新データに基づいて演算されていることになる。そして、次のGFSデータ更新時刻(例えば、06時)になると、第2ステップを終了して、第1ステップへとリターンする(ステップ23のYes)。
【0033】
本願の第2ステップによれば、毎正時のたびに受信する新たなGPV風データから初期条件を生成し、次の1時間後の波浪予測を行うことが繰り返されることになる。これは、時間の経過に伴い海洋状態が変化し、その結果、数時間前の海洋状況を基に予測していた波浪予報データが実際と大きく乖離することを防止できる。1時間ごとの最新の風データを波浪推算プログラム(SWAN)6に適用した予報データは、後述する検証結果が示すとおり、実際の値と極めて近似していることを確認している。
【0034】
本実施形態によれば、GFSデータの更新があるたびにN時までの波浪予測を第1ステップで行い、これを第2ステップのSWANによる波浪予測における境界条件にし、かつ、毎時大気解析(GPV)の風データを基に補間したN時までの波浪予測値を初期条件にする。したがって、広範囲な海洋全体の気象条件を波浪予測に反映できるとともに、N+1時の波浪予測が、N時という1時間前の安定した波浪状況から計算させることが可能であるため、スピンアップ時間を従来よりも格段に短くさせることができる。
また、本実施形態の場合、初期条件を作成するのにGPVの風データを用いることから、広範囲な領域での連続した大気の流れから把握される観測データが波浪予測に反映することとなり、波浪予測の精度を向上させることができる。
【0035】
次に、図2の第1ステップにおける処理にステップ37〜39を追加した図3の波浪予測について説明する。
図3に示す本実施形態は、「外側領域の波浪予測」の実行の後に、「内側領域の波浪予測」の演算を行うものである。つまり、外側領域の波浪予測と内側領域の波浪予測という二段階の手順を踏んでいる。
【0036】
外側領域を対象とする予測演算は、処理時間の関係上、メッシュ格子点の間隔は粗くなる傾向があり、これに伴い沿岸域での解析精度は低下しがちである。このため、高精度な波浪予測のためには局地領域を設定し、その領域内でメッシュを細かくした演算が要求される。しかし、広範囲な外側領域の予測が不必要になるというわけではない。例えば、数日後、数週間後に局地領域に到達するような遠く離れた海洋上に熱帯低気圧が発生したことは、外側領域での波浪予測がなされてこそ捉えられるのであって、いきなり特定の局地領域に絞って演算すればよいとは必ずしもならない。局地領域の解析の前提として、広範囲な海洋全体の気象の動きを事前に把握しておくことは予測精度の向上にとって重要である。本実施形態では、このような観点から外側領域及び内側領域という二段階の波浪予測を行う。
【0037】
ステップ37で、波浪予測部3は、アメリカ大気研究局(NCAR)の局地気象予測プログラム(WRF)7を用いてメソスケールの気象予報データを計算する。WRF7は、外側領域の予測で用いられた1度間隔(約100kmメッシュ)のGFSデータを内側領域計算のための初期値・境界値条件として取り込む。内側領域とは、外側領域に含まれる局地領域を指し、本実施形態の場合、例えば北緯24〜47度、東経126〜149度の領域である。そして、予測方程式と呼ばれる6つの方程式と診断方程式、気体の状態方程式を解き、気圧、風向、風速、気温、降水量、雲量などの予測データを約5km〜500m(メソスケール)間隔のメッシュ格子点で算出する(ステップ37)。全球気象予測システム(GFS)のメッシュ間隔と比べて、大幅にダウンスケールした各地点の予測データとなる。
【0038】
波浪予測部3は、WRF7で演算された気象予測データのうち、1時間間隔の風向・風速である風予測データを抽出する(ステップ38)。そして、抽出した風予測データ、及びステップ36で算出した外側領域の波浪予測結果をSWAN6に設定して、内側領域を対象とした波浪予報データを計算する(ステップ39)。
【0039】
本実施形態によれば、GFSの風データを用いて計算された外側領域の波浪予測が、内側領域の波浪予測の境界条件として導入されるので、外側領域から入射するうねり等の状況が反映された内側領域の波浪予報データとなる。したがって、空間的な精度が高いWRF風データに基づく波浪予測を行うことができる。
【0040】
図6(a)は外側領域の波浪予測の結果を示す一例である。日本近海を対象とした1度(約100km)メッシュで波浪解析した。また、同図(b)は、地形が複雑な狭領域の内側領域における波浪予測結果を描画したものである。
【0041】
次に、図4に示す波浪予測について説明する。図4の特徴は、ステップ60が追加されている点である。他のステップについては図2又は図3の処理と重複するので省略し、この追加したステップ60について説明する。
ステップ60は、第1ステップからの波浪予報データと、実際の観測値であるGPV風データとのデータ同化処理を行う。データ同化処理とは、波浪推算プログラムに設定する初期条件や境界条件、さらには他のパラメータの与え方によって、予報データが現実の現象から乖離して著しく不適切になることを防止するために行われる処理である。本願では、境界条件という空間的な精度を考慮した第一推定値としての意味をもつN時の波浪予報が第1ステップより得られ、そして時間的な精度を考慮するための初期条件となるGPV風データを基にしたN時の波浪推算が第2ステップより得られ、これらの値がN+1時の波浪予測に影響を与えることから、両値を融合させることで精度の高い初期条件を作成する。データ同化処理の手法としては、具体的には例えば、第1ステップからの波浪予報値と、第2ステップからのGPV風データを基にした波浪推算値との重み付き平均、或いは単純平均をとって、SWAN6に設定すればよい。なお、データ同化アルゴリズムは、重み付き平均、或いは単純平均に限定するものではなく、アンサンブルカルマンフィルタ、粒子フィルタ、混合カルマンフィルタ、変分法などの様々な同化手法を適用することができる。さらに、全国港湾海洋波浪情報網(ナウファス)による観測データを同化させるようにしてもよい
なお、第1ステップのステップ46で得られた波浪予測結果は、ステップ41でのSWANで境界条件としても用いられる。
【0042】
本実施形態によれば、上述したように、境界条件という空間的な精度を考慮した第一推定値としての意味をもつN時の波浪予報と、時間的な精度を考慮するための初期条件となるGPV風データを基にしたN時の波浪推算とのデータ同化処理を行い、その結果をSWAN演算のための初期条件にすることができる。これにより、高精度の初期条件を用いてN+1時の波浪予測が行われることになり、波浪予測の精度を向上させることができる。
【0043】
次に、図5に示す波浪予測について説明する。この処理は、これまで説明してきた図2〜4の第2ステップの内容に相当する。繰り返しになるが、本処理の特徴は、N-1時及びN時に観測された風データ(波浪に関する直接的な波高データではなく、風データであるという点に注意)によってN時の波浪予測値が再計算される点、その再計算された波浪予測値によりN+1時の波浪予測が修正される点である。このような予測処理は、毎正時の時点の波の変化状況を入力条件として導入するので、計算結果が安定するまでのリードタイムであるスピンアップ時間を短縮し、計算プロセスを高速化することができる。本処理を模式的に表したのが図7である。
【0044】
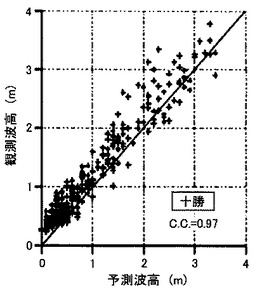
次に、本波浪予測システム100による波浪予測値の評価結果を示す。本波浪予測システム100を用い、図4に示す処理を行って算出した2007年12月1日から31日間の予測結果を、外洋に開いた観測点とみなされる輪島、金沢、鳥取、浜田、紋別、十勝、むつ小川原の7地点のナウファス観測結果と比較・検討した。図8は、上記7地点のうちの5地点における1ヶ月間の波浪予測結果及び観測結果を時系列で示している。上から (a) 十勝, (b) むつ小川原, (c) 輪島,(d)金沢, (e) 鳥取の有義波高データを縦軸に示している。グラフ中の実線が観測結果データであり、破線は予測結果データである。5地点の何れにおいても、1ヶ月間と通じて予測結果と観測結果がほぼ一致しており、本願発明による予測精度が非常に高いことが裏づけられた。
【0045】
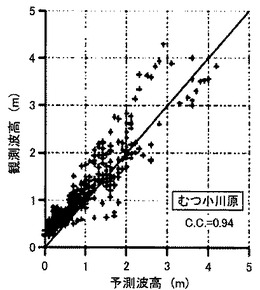
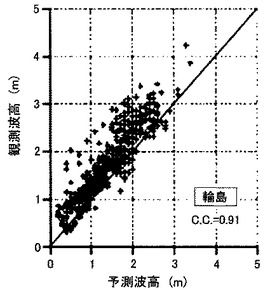
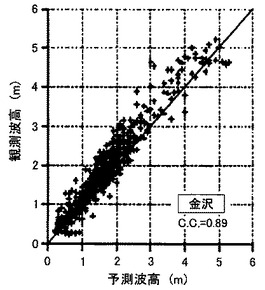
また、図9は、有義波高の予測値を横軸に、観測値を縦軸にプロットすることで、予測値と観測値を直接に対応させて相関性を調べた結果である。具体的な相関係数値を算出すると、十勝(0.97),むつ小川原(0.94),輪島(0.91),金沢(0.89),鳥取(0.90)であった。鳥取の場合、高波高領域において傾き1の直線より予測値側にプロット点が集中していることから、高波高領域で予測値が大きくなる傾向が示された。それ以外の地点の場合は、全般的に観測値側にプロット点が集まっており、予測値が観測値より若干小さな値を示す傾向があった。いずれにしても、全地点で、相関係数の値がほぼ0.90又はそれ以上というように予測値と観測値の対応が良いことがわかり、本願発明が波浪予測の技術として実用化し得ることを確認できた。
【0046】
また、従来のシステムが現時点の気象状況から推測される数時間先の予報を可能な限り実際に近似させてタイムリーに提供することができなかったのに対し、本願の波浪予測システムは、少なくとも毎正時に得られる毎時大気解析(GPV)風データを使ってN+1時の波浪予測が遅滞無く実行できる。つまり、本願の波浪予測システムは、従来の波浪予測が達成し得なかった真のリアルタイム予報を実現する程の高速性を備えている。
【0047】
なお、本実施形態では、波浪予測部(SWAN)6が、外側領域を北緯5〜55度、東経120〜175度の範囲とし、1度(約100km)メッシュで解析を行った結果を示したが、外側領域が本範囲に限定されるものではないし、メッシュ間隔も使用する処理装置の演算性能で任意に設定し得るものである。同様に、内側領域の範囲やメッシュ間隔などが任意の値を取りうるものであることは言うまでもない。
さらに、本実施形態では、データ受信部2が、気象業務支援センターからの毎時大気解析GPV風データ、及び全球気象予測システムが解析したGFSデータを受信する構成であることを示した。そして、波浪予測部3が波浪推算プログラム(SWAN)6及び局地気象予測プログラム(WRF)7を用いて予測演算を実行するものとして説明してきた。これは、現時点で、これらのデータ及びモデルを低コストで入手でき、データ加工し易いこと等を理由に採用したに過ぎない。同等又はそれ以上の高精度なデータを入手し、代替の推算又は予測プログラム(モデル)を用いた場合でも、本願発明の実施を妨げるものではない。
【0048】
なお、必ずしも局地気象予測モデル(WRF)によりダウンスケールした局地気象予測モデル(WRF)を用いて内側領域の波浪予測を求めなければならないというわけではない。図2のフローチャートに示すように、例えば、陸上から遠く離れた外洋や、海底地形の変化が小さい領域等の場合、WRFでダウンスケールすることなく全球気象予報システム(GFS)上のメッシュ格子点による解析が行われるようにしてもよい。
【0049】
また、本実施形態の場合、N-1時〜N時の間を線形内挿して計算することとしたがこれに限定したわけではない。例えば、N-1時及びN時の風データのみならず、N-1時〜N時の間を多項式補間して得られるGPV風データによる波浪予測値を使用してもよい。また、毎正時(1時間ごと)になると、GPV風データを受信し第2ステップを繰り返すように説明したが、毎正時に限定したものではないことは言うまでもない。一定時間の経過後になると第2ステップでの反復が繰り返される一例として挙げたものである。
【0050】
上述してきた本実施形態の波浪予測システム100によれば、波浪ブイなどの波浪観測機器が設置されていない海洋地点においても、言い換えれば、実際の波浪観測機器の存在とは無関係に、これら観測機器から得られるデータを基にした波浪予測と同程度の精度で従来に比べて格段に早い波浪予測を行うことができる。従来のシステムでは、実際の波浪観測機器が存在しない地点での波浪観測は不可能であるか、或いは低精度な予測しかできないという制約があったのに対し、本願の波浪予測システムの場合、あらゆる地点の波浪予測を行える。
【0051】
ところで、全国港湾海洋波浪情報網(ナウファス)が提供する有義波高や有義波周期は、海象計または超音波波高計によって海中超音波信号の送受波を計測し、独立行政法人港湾空港技術研究所の波浪データ処理システムによって演算・処理されるため、砕波などによって海面付近に気泡が混入すると、超音波信号にはノイズが混入し、観測波浪データの解析が出来ない場合がある。このような場合、ナウファスは欠測データの扱いをしていた。欠測データの対処方法として、例えば、海象計や超音波波高計に併設される水圧変動測定センサーの測定データを用いて有義波高・周期を推定することが理論的には可能である。しかしながら、その推定のためには観測点毎の観測機器の特性に応じた換算係数の設定が必要なことから、これまでは、事後の解析時に責任技術者がその都度換算係数の設定を確認しながら、水圧変動記録をとって評価していたに過ぎず、リアルタイムで取得できるデータの範囲は制限があった。これは、超音波信号にノイズが混入しやすく、かつ一層リアルタイム性の波浪情報が要求される高波浪時において不都合な問題として顕在化した。このため、ナウファスには、水圧変動から有義波高・周期をリアルタイムで自動推定するシステムが導入され、超音波信号にノイズが混入した場合に捕捉表示を行う機能が付加されている。ただし、水圧変動記録を用いたデータの自動捕捉は低波浪時には信頼性が低くなる欠点を有するため、有義波高推定値が0.5m未満の場合には行なわれておらず、水圧変動記録にノイズが含まれてしまう場合は依然として欠測データのままである。
【0052】
したがって、本願発明の波浪予測システム100は、ナウファスなどの従来の波浪予測が成しえなかった任意の地点の波浪予測をリアルタイムで行うことを実現する唯一の技術である。本波浪予測システム100によれば、波浪災害発生時、あるいは災害が予想される時点において、波浪がどのような状況になっており、これからどの程度継続するか、どのように変化するか等、現在および数時間先の状況を高精度かつリアルタイムで把握することができる。
【0053】
さらに、本発明の別の目的は、波浪予報を高精度且つリアルタイムで分かり易くユーザに呈示することのできることにある。波浪予報データは、自治体や企業が港湾・海洋工事における海上事故の防止やリスク軽減、海上交通における安全航行の補助といった高波災害の対策のために利用するにとどまらず、一般人のマリンレジャーにおける海浜事故や事故防止又はリスク軽減を図るために活用されることが有用である。そこで、波浪予測システム100で計算した波浪予報データを配信する方法について説明する。
【0054】
波浪予測システム100の情報配信部5は、波浪予測部3から波浪予測情報を受け取ると、インターネットなどの通信回線14を介して或いは無線で任意の情報端末11,12や携帯電話13などに対して波浪予測情報を送信する。例えば、情報端末11,12の各種Webサイト、携帯端末13上のi-mode(登録商標)、EZweb、Yahoo!Keitaiなどインターネットの各種接続サービスにおいて、ユーザの簡易な操作を通じて波浪情報が取得される。
【0055】
解析結果をどのような表示形式で提供するかは、ユーザの波浪情報に対する要求内容に依存する。例えば、常に自分の現在位置或いは今後の移動地点のみの波浪情報が分かればよいというユーザがいる一方で、自分のいる地点を含めた或いは自分の位置とは無関係に、より広領域での波の様子を知りたいというユーザもいる。このため、ユーザの現在位置を自動探知すること、所望の地点をピンポイントで指定したり地図上で指示できること、現時点のみならず一定時間の波の様子の経時変化を視覚的に捉えたいといった要求に応じられるようにすることが望まれる。
【0056】
そこで本実施形態の情報配信部5は、全地球測位システム(GPS)付きの携帯電話向けにGPSによるピンポイントエリア用データ配信、及び主に一般のパーソナルコンピュータ向けにユーザの任意指定箇所用データ配信を可能にする処理を行う。また、配信されるデータは、緯度及び経度で特定される位置情報に対応する波浪予報データをテキスト形式で直接検索できるとともに、ユーザが情報を容易に把握できることを考慮して上記いずれのデータ配信においてもアニメーション表示が可能な構成にした。図10は、パーソナルコンピュータ上でユーザが地図上の任意の地点を指定し、当該地点の波浪情報をバーチャル(仮想)ブイとして表示している。このバーチャルブイとは、本発明が、実際の波浪観測機器が設置されていない地点にあたかも当該観測機器が存在し、波浪予測を行っているとみなせることから名付けたものである。
また、図11は、携帯電話又はパーソナルコンピュータ上で解析後の風の向きをアニメーション表示した際の一瞬間を示した例である。さらに、図12は、波の高さ及び周期などを一定期間における経時変化がわかるようにグラフ化した例である。同図下部には、具体的な数値データをあわせて表示している。
【0057】
本願発明の場合、波浪予報の速報性、すなわちリアルタイムにデータを提供する必要がある。このため、本実施形態の波浪予測システム100は、波浪予測データをアニメーションやバーチャルブイで表示するのに要する画像処理時間をできるだけ削減することが要求される。図5又は図2〜4の第2ステップのリアルタイム推算が毎正時に反復されることから、情報配信部5が波浪予報データをテキストデータのままで波浪予測部3から受け取り、且つこれをそのまま利用するとなると、処理時間が長くなり、毎正時ごとに解析した最新の予報情報をアニメーション表示等することができなくなる恐れがある。上述したように、波浪予測システム100は、従来のスーパーコンピュータを使用することなく、市販の低廉なハードウェアによるクラスターコンピュータにより構築しているので、極めて高速な処理プロセッサが搭載されていなくてもリアルタイム性が維持できる短時間の画像処理を実現したい。
【0058】
そこで、画像表示のためのデータ加工処理を行うように工夫を施した。その手順を示すのが図13である。
波浪予測システム100の波浪予測部3は、SWAN6を用いて計算した波浪予測値を、緯度及び経度情報に関連したテキストデータで出力するので、画像描画ソフトウェアプログラムがこのテキストデータを入力し、画像データを生成する必要がある。通常の描画ソフトの場合、描画対象として指定された地点又は領域の緯度・経度に関連付けられた波浪予測テキストデータは、画像描画ソフトウェアプログラムに直接インプットされ、レンダリング処理が行われる。この方法で画像を生成しようとすると、一つ一つの地点の緯度・経度をもつテキストデータがテキストデータファイルから連続して読み出された後に、描画のための処理が繰り返されることになる。したがって、テキストデータファイルは標準的な指定領域で例えば約47MBも要するし、画像処理用のメモリの使用量が非常に大きく且つ連続して使用されることから、波浪予測の1エリア(約165km×330km四方)で1枚の画像生成のために要する所要時間は少なくとも3分を必要とする。しかも波浪予測部3で使用するサーバとは別の専用サーバを準備することになる。そうすると、日本近海のために必要とされる10エリアの画像生成を行うとすれば、30分以上の時間が費やされてしてしまう。これでは、波浪予測部3が毎正時にGPV風データを受信し、波浪予測値の修正を行うために要する時間と合わせると、日本近海を網羅した画像表示を毎正時内に配信することが実際上は不可能となってしまう。本発明はデータ変換部4によるソフトウェア処理の工夫でこの問題に対処している。
【0059】
データ変換部4は、解析機能を有する描画ソフトGrADS(The Grid Analysis and Display System)を採用して描画時間を短縮することを想定している。この描画ソフトは、格子状に配列された4次元データを2次元描画する気象用の可視化ツールであり、データセット内に描画データを格納して準備しておけば、コマンドの入力に従い描画を容易に実現できる。また、GrADSは、通常の描画ソフトには無い解析ツール機能を有するので、例えば組み込み関数の結果を直ちに画像化することができるものの、一方で格子データ以外の任意の書式のデータを扱うことができない。つまり、SWAN6で求めた波浪予測テキストデータは、GrADSの処理で直接あつかうことができず、一旦、テキストデータを格子データに変換する必要がある。従来の波浪又は気象予報システムは、このデータ変換の問題が大きな障壁となって、GrADSを用いたリアルタイム画像生成を行うことができなかった。
【0060】
本願では、テキストデータを格子データへ自動変換する機能を開発し、上述した問題を解決した。コストと処理時間を度外視すれば、テキストデータをGrADS用の格子データに自動変換させる機能を有するシステムを開発することは容易であろうが、本願発明では、毎正時内に画像データをユーザに配信するニーズがあるために、前工程である波浪予測部3の演算後、およそ6〜7分以内にはすべての画像生成処理を終了させるという制約が存在する。そのために、特にテキストデータを格子データに変換するプロセスの処理速度を、限られたハードウェア性能にもかかわらず、可及的に実行する必要がある。そこで、図13に示すとおり、一般的な変換の処理手順とはまったく異なる独自の方法を案出した。
【0061】
図13に示す、テキストデータから格子データへの自動変換処理について説明する。
まず、SWANが出力するテキストデータファイルにデータ欠損等がないかをエラーチェックする(ステップ70)。そして、このテキストデータファイルの数のカウントと、ファイル名の付与又は調整を行う。SWANが出力するテキストデータファイルの中身の一例を図14に示す。左から1列目のデータ項目は経度、2列目のデータ項目は緯度をあらわす。図14に示すテキストデータファイルには、緯度が24degreeのデータが格納されているが、例えば、1つ目のテキストデータファイルには21〜30degreeの緯度データに関係するSWAN出力値、2つ目のテキストデータファイルには31〜40degreeの緯度データに関係するSWAN出力値、…というように、SWANが解析して出力するデータが複数のテキストデータファイルに格納されるようになっている。そこで、1つ目のテキストデータファイルのデータを読み込んで、そのテキスト情報(波高、波向、周期)からGrADS用の格子サイズを決定しておく(ステップ71)。
【0062】
次に、各テキストデータファイル内のデータを緯度毎に分割して、それぞれ個別のバイナリーファイルを作成する(ステップ73)。複数のバイナリーファイルは同一の緯度でまとめられているので、分割されたファイル内のテキストデータを1列ずつ処理していくと、GrADSの或る1つの緯度に関するすべてのテキストが一括して格子データに変換される(ステップ75)。これをステップ72で特定した分割ファイル数の分だけ反復する(ステップ74)。上述したファイル分割の流れを模式的にあらわしたのが図15である。
【0063】
なお、テキストデータファイルは、データの内容や格納順など、一切の属性情報を有していない。そこで、テキストデータファイル内のデータに関する情報は別個のコントロールファイル内に定義しておき(ステップ77)、GrADSはコントロールファイルの情報に基づいてこのテキストデータファイルを読み出して格子データに変換し、描画画像を生成する(ステップ78)。
【0064】
このように、本発明は、SWANによって波浪予測されたテキストデータをGrADSで読めるようにするため、テキストデータファイルを変換する際に、緯度・経度ごとで関連づけられ記述されているファイル内の波浪予測データを、いったん緯度を基準としたデータリストに整理するために緯度毎のファイルに分割することを特徴とする。このような緯度を共通する波浪予測データをもつファイルに整理することで、小口化されたファイルごとに格子データへの変換処理を行うことが可能となり、一回の変換処理に要するメモリの負荷が大幅に削減される。従来は全緯度同時で計算していたところを、小口化された全てのファイルの変換処理が同様な方法で繰り返されるようにループさせると、変換の全工程を通じてメモリ使用量の低い状態が維持され、メモリの処理効率を大幅に向上させることができる。データ変換前のテキストファイル容量47MBは、変換後は12MBのバイナリデータファイル容量となり、およそ25.5%にまで削減される。完成した画像ファイルは、PC向けで35KB、携帯端末向けで12KBにまで容量が削減されることを確認できた。なお、本実施形態では、データを緯度毎でまとめてファイル分割し、格子データの変換を行う場合を説明したが、同一の経度を有するデータでファイル分割しても同様の作用効果を得られる。
【0065】
また、情報配信部5による緯度データ毎のファイルの作成→緯度データ毎の一括計算という一連の処理は、例えば、C言語等で作成した変換プログラムの実行で自動的に行うことが可能である。これにより、波浪予測部3がSWAN6を用いて解析した波浪予報データ、すなわち緯度・経度で配列されたテキストデータが、任意のメッシュ間隔(例えば、2〜5km)の格子データに自動的に変換され、GrADSに適したデータファイルを低工程数かつ迅速に生成することができる。
【0066】
上述した一連のデータ変換の所要時間は、LINUXのOSを搭載するPentium(登録商標)IVプロセッサレベルのパソコン1台で動作させた場合、約165km×330km四方の1エリア(画像1枚)で約30秒以内に終了し、従って日本近海を網羅する10エリアを合計しても最大約5分でユーザに配信することができる。すなわち、上述した画像データを描画する前にソフトウェア処理によるデータ変換処理を行っておくことで、画像生成ソフト用に高性能且つ高価な専用サーバを調達することなく、波浪予測データをユーザにリアルタイムで配信し表示することができる。波浪予測システム100の一部を使用できる範疇、すなわちLINUXのOSを搭載したPentium(登録商標)IVプロセッサレベルのパソコン1台をハードウェアとして準備するだけなので、初期費用及びランニングコストを格段に抑えることが可能となり、多くのユーザに高精度で且つわかりやすい気象情報サービスの提供を実現できる。
【0067】
さらに、上述した、画像データから任意地点の情報をグラフで表示したり、テキストで一覧表示する方法について情報配信部が行う処理を以下に説明する。図16はその手順を示したフローチャートである。
まず、情報配信部は、PC又は携帯電話などの表示画面に地図を表示させる(ステップ80)。この段階での表示は、通常は、広範囲な領域を描画しておくのが好ましい。次に、ユーザがこの地図上の任意の箇所をクリック指定することを受けて、当該指定地点の経度及び緯度を特定する(ステップ81)。そして、指定された領域の画像データを生成し、描画する(ステップ83)。画面上には、指定領域及びその周辺領域のみを描画すればよいので、ステップ80での表示スケールよりも拡大したスケール値であるのが普通である。
【0068】
一方で、当該指定された地点の緯度又は経度情報に関連づけられた波浪予測テキストデータをデータファイルから読み出し(ステップ82)、グラフ等を表示する(ステップ84)。具体的には例えば、
(a)波浪予測テキストデータの風向・風速・風向データ値を表示したり、これらのデータの一定時間についての経時的変化をグラフで表示する。
(b)指定された地点が複数であれば、当該複数地点の風向・風速・風向のテキストデータを表示したり、それぞれの地点をリスト形式で表示する。
(c)さらに細分化した格子区間の予報画像を抽出し、表示する。
【0069】
本実施形態の情報配信部5による画像データの変換及びデータ配信によれば、ユーザは画面に表示された地図上の任意の点又は範囲をパソコン上で指定したり、携帯電話が備えるGPS機能で現在位置を検出することで、実際の波浪観測機器の存在とは無関係に任意の地点又は領域について、それらの波高、波向、周期等の波浪データを短時間で描画することができる。この場合、過去から現時点の状況、或いは数時間先の状況を時系列に示すことで、災害発生時或いは災害が予想される時点において現在波浪がどのような状況になっており、これからどの程度継続し、どのように変化するのかをユーザに提供できる。しかも、地図上でアニメーションによって表わすことで、ユーザにわかりやすく表示することもできる。このようなデータ配信及びデータ表示は、従来の波浪予測システムでは実現されていなかったものである。
【0070】
これまでは主に国や自治体等が海上交通や港湾・海洋工事における海上事故の防止のために波浪予測データが特定の方法でデータ提供されていたが、本実施形態の波浪予測システム100により、個人経営の沿岸漁家や、マリンレジャー・マリンスポーツ参加者にも、高精度な波浪予測データを迅速、簡便、且つ低価格で提供することが可能となる。その結果、多くの地域住民が波浪情報を能動的に取得して、海上交通における安全航行の補助、海難事故の防止・軽減などの低減に大きく貢献することができるようになる。
【0071】
なお、本発明の目的は、波浪予測システム100の機能を実現するソフトウェアのプログラムコードを記憶した記憶媒体を、システム或いは装置に供給し、そのシステム或いは装置のコンピュータ(又はCPUやMPU)が記憶媒体に格納されたプログラムコードを読みだして実行することによっても達成される、ことは言うまでもない。
この場合、記憶媒体から読み出されたプログラムコード自体が本実施形態の機能を実現することとなり、そのプログラムコードを記憶した記憶媒体及び当該プログラムコードは本発明を構成することとなる。
プログラムコードを供給するための記憶媒体としては、ROM、フレキシブルディスク、ハードディスク、磁気ディスク、光磁気ディスク、コンパクトディスクROM(CD-ROM)、CD-R、CD-RW、デジタル多機能ROMドライブ(DVD ROM)、磁気テープ、Zipドライブ、フラッシュメモリカード、メモリスティック、揮発性メモリ及び/又は不揮発性のメモリカード等を用いることができる。揮発性メモリは、例えば、ランダムアクセスメモリ(RAM)、シンクロナスRAM(SRAM)、ダイナミックRAM(DRAM)、シンクロナスDRAM(SDRAM)、ダブルデータレートSDRAM(DDR SDRAM)、及びダイレクトRAMバスRAM(DRRAM)を含む。不揮発性メモリは、例えば、読出し専用メモリ(ROM)、プログラム可能読出し専用メモリ(PROM)、電気的プログラム可能読出し専用メモリ(EPROM)、電気的消去可能プログラム可能読出し専用メモリ(EEPROM)、及びこれらに類するものを含む。
【0072】
また、コンピュータが読みだしたプログラムコードを実行することにより、本実施形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼動しているOS等が実際の処理の一部又は全部を行い、その処理によって本実施の形態の機能が実現される場合も含まれる。
さらに、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された拡張機能ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部又は全部を行い、その処理によって本実施形態の機能が実現される場合も含まれる。
【図面の簡単な説明】
【0073】
【図1】本発明による方法を実現する一実施形態としての波浪予測システム及び関連する周辺機器の全体構成図である。
【図2】波浪予測の処理内容を示したフローチャートである。
【図3】波浪予測の処理内容を示したフローチャートである。
【図4】波浪予測の処理内容を示したフローチャートである。
【図5】波浪予測の処理内容を示したフローチャートである。
【図6】外側領域及び内側領域に関する波浪予測の結果の一例を示す図である。
【図7】波浪予測処理の第2ステップの風データ処理の内容を模式的に表した図である。
【図8a】本発明による波浪予測値の評価結果を示すために、十勝の波浪予測結果及び観測結果を示す図である。
【図8b】本発明による波浪予測値の評価結果を示すために、むつ小川原の波浪予測結果及び観測結果を示す図である。
【図8c】本発明による波浪予測値の評価結果を示すために、輪島の波浪予測結果及び観測結果を示す図である。
【図8d】本発明による波浪予測値の評価結果を示すために、金沢の波浪予測結果及び観測結果を示す図である。
【図8e】本発明による波浪予測値の評価結果を示すために、鳥取の波浪予測結果及び観測結果を示す図である。
【図9a】十勝の有義波高に関する予測値及び観測値の比較を示す図である。
【図9b】むつ小川原の有義波高に関する予測値及び観測値の比較を示す図である。
【図9c】輪島の有義波高に関する予測値及び観測値の比較を示す図である。
【図9d】金沢の有義波高に関する予測値及び観測値の比較を示す図である。
【図9e】鳥取の有義波高に関する予測値及び観測値の比較を示す図である。
【図10】波浪予測情報をユーザに提供するインタフェースの一例を示す図である。
【図11】波浪予測情報をユーザに提供するインタフェースの一例を示す図である。
【図12】波浪予測情報をユーザに提供するインタフェースの一例を示す図である。
【図13】画像表示のためのデータ加工処理の手順を示すフローチャートである。
【図14】テキストデータファイルの中身の一例を示す図である。
【図15】テキストデータファイルを分割する処理により分割ファイルが生成される様子を示す図である。
【図16】波浪予測情報をグラフ又は一覧表示等するときの処理手順を示すフローチャートである。
【符号の説明】
【0074】
1 データ格納部
2 データ受信部
3 波浪予測部
4 データ変換部
5 情報配信部
6 波浪推算プログラム(SWAN)
7 局地気象予測プログラム(WRF)
8 大気解析モデル
9 気象予報モデル
10,14 通信回線
【特許請求の範囲】
【請求項1】
第一推定値の気象予報値を観測値で修正した大気解析データと、海洋の波浪状態を予測する波浪推算プログラムとを利用して海洋の波の諸量を予測する波浪予測システムであって、
所定の時間間隔で得られる前記大気解析データから風向及び風速データを抽出するデータ受信手段と、
前記大気解析データに含まれる風向及び風速データを基に、N時の所定時間(α)前の時点(N-α)からN時の間をデータ補間することによってN時の波浪データを推算し、当該推算データ値をN+α時の波浪予測のための初期条件値として前記波浪推算プログラムに設定して、N+α時の波浪を予測する波浪予測手段とを有し、
前記データ受信手段が、更新後の新たな大気解析データの風データを所定時間間隔(α)で受信するたびに、前記波浪予測手段は、当該更新後の風データによるデータ補間に基づき推算した波浪データ値を、次のα時間後の波浪予測の初期条件として前記波浪推算プログラムに再設定して前記所定時間(α)経過後の波浪予測を繰り返すことにより、時間経過に伴う波浪状態の変化予測データに誤差拡大がないようにすることを特徴とする、波浪予測システム。
【請求項2】
前記データ受信手段は、地球全体の大気の状態変化を数値的に計算し地球規模での気象変化を予測計算した全球気象予報データを更に受信し、
前記波浪予測手段は、前記全球気象予報データに含まれる風向及び風速データを前記波浪推算プログラムに入力して演算した広領域波浪予報データを、前記所定時間間隔(α)ごとに繰り返される波浪予測のための領域境界条件として前記波浪推算プログラムに設定する、請求項1に記載の波浪予測システム。
【請求項3】
前記波浪予測手段は、前記波浪推算プログラムに対し、
前記広領域波浪予報データを前記広領域内の局所領域の境界条件として設定し、さらに、メソスケールの気象変化を予測する局地気象予測プログラムを用いて求めた前記局所領域の風データを初期条件として設定して前記局所領域の波浪予測を行う、請求項2に記載の波浪予測システム。
【請求項4】
前記大気解析データに含まれる風向及び風速データをデータ補間することにより推算されるN時の波浪データと、前記初期条件として設定されるN時の波浪予報データとをデータ同化処理した結果を前記初期条件とする、請求項2又は3に記載の波浪予測システム。
【請求項5】
前記波浪予報データを画像データとして表示するためのデータ変換手段をさらに含み、
データ変換手段は、前記波浪推算プログラムを用いて推算された波浪予報データを緯度又は経度の値によって分類して、同一な緯度又は経度を有する波浪予報データが1つの単位となるように管理又は記憶媒体に記憶し、当該1つの単位ごとに画像描画ソフトウェア用のデータフォーマットで変換する、請求項1〜4の何れにも対応できるデータ変換システム。
【請求項1】
第一推定値の気象予報値を観測値で修正した大気解析データと、海洋の波浪状態を予測する波浪推算プログラムとを利用して海洋の波の諸量を予測する波浪予測システムであって、
所定の時間間隔で得られる前記大気解析データから風向及び風速データを抽出するデータ受信手段と、
前記大気解析データに含まれる風向及び風速データを基に、N時の所定時間(α)前の時点(N-α)からN時の間をデータ補間することによってN時の波浪データを推算し、当該推算データ値をN+α時の波浪予測のための初期条件値として前記波浪推算プログラムに設定して、N+α時の波浪を予測する波浪予測手段とを有し、
前記データ受信手段が、更新後の新たな大気解析データの風データを所定時間間隔(α)で受信するたびに、前記波浪予測手段は、当該更新後の風データによるデータ補間に基づき推算した波浪データ値を、次のα時間後の波浪予測の初期条件として前記波浪推算プログラムに再設定して前記所定時間(α)経過後の波浪予測を繰り返すことにより、時間経過に伴う波浪状態の変化予測データに誤差拡大がないようにすることを特徴とする、波浪予測システム。
【請求項2】
前記データ受信手段は、地球全体の大気の状態変化を数値的に計算し地球規模での気象変化を予測計算した全球気象予報データを更に受信し、
前記波浪予測手段は、前記全球気象予報データに含まれる風向及び風速データを前記波浪推算プログラムに入力して演算した広領域波浪予報データを、前記所定時間間隔(α)ごとに繰り返される波浪予測のための領域境界条件として前記波浪推算プログラムに設定する、請求項1に記載の波浪予測システム。
【請求項3】
前記波浪予測手段は、前記波浪推算プログラムに対し、
前記広領域波浪予報データを前記広領域内の局所領域の境界条件として設定し、さらに、メソスケールの気象変化を予測する局地気象予測プログラムを用いて求めた前記局所領域の風データを初期条件として設定して前記局所領域の波浪予測を行う、請求項2に記載の波浪予測システム。
【請求項4】
前記大気解析データに含まれる風向及び風速データをデータ補間することにより推算されるN時の波浪データと、前記初期条件として設定されるN時の波浪予報データとをデータ同化処理した結果を前記初期条件とする、請求項2又は3に記載の波浪予測システム。
【請求項5】
前記波浪予報データを画像データとして表示するためのデータ変換手段をさらに含み、
データ変換手段は、前記波浪推算プログラムを用いて推算された波浪予報データを緯度又は経度の値によって分類して、同一な緯度又は経度を有する波浪予報データが1つの単位となるように管理又は記憶媒体に記憶し、当該1つの単位ごとに画像描画ソフトウェア用のデータフォーマットで変換する、請求項1〜4の何れにも対応できるデータ変換システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図7】
【図8a】
【図8b】
【図8c】
【図8d】
【図8e】
【図9a】
【図9b】
【図9c】
【図9d】
【図9e】
【図13】
【図14】
【図15】
【図16】
【図6】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図7】
【図8a】
【図8b】
【図8c】
【図8d】
【図8e】
【図9a】
【図9b】
【図9c】
【図9d】
【図9e】
【図13】
【図14】
【図15】
【図16】
【図6】
【図10】
【図11】
【図12】
【公開番号】特開2010−54460(P2010−54460A)
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【出願番号】特願2008−222205(P2008−222205)
【出願日】平成20年8月29日(2008.8.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Linux
2.EZweb
【出願人】(504132272)国立大学法人京都大学 (1,269)
【出願人】(500069046)株式会社サーフレジェンド (1)
【公開日】平成22年3月11日(2010.3.11)
【国際特許分類】
【出願日】平成20年8月29日(2008.8.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Linux
2.EZweb
【出願人】(504132272)国立大学法人京都大学 (1,269)
【出願人】(500069046)株式会社サーフレジェンド (1)
[ Back to top ]