
多段式ロケット誘導装置、多段式ロケット誘導プログラム、多段式ロケット誘導方法および多段式ロケット誘導システム
【課題】空中発射ロケットを目標地点に誘導することを目的とする。
【解決手段】予測演算部220は航法装置からロケットの現在の位置ベクトルと現在の速度ベクトルと推力加速度ベクトルとを入力する。予測演算部220は現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと現在時刻と現段燃焼終了時刻と、現段推力加速度プロファイルとに基づいて現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと現段燃焼終了時刻と最終段燃焼終了時刻と最終段推力加速度プロファイルとに基づいて最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する。誘導演算部230は最終段燃焼終了時刻の軌道の予測値と軌道の目標値とを比較し、軌道の予測値と軌道の目標値との差に基づいて新たな推力方向の角度を算出してロケット制御装置に出力する。
【解決手段】予測演算部220は航法装置からロケットの現在の位置ベクトルと現在の速度ベクトルと推力加速度ベクトルとを入力する。予測演算部220は現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと現在時刻と現段燃焼終了時刻と、現段推力加速度プロファイルとに基づいて現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと現段燃焼終了時刻と最終段燃焼終了時刻と最終段推力加速度プロファイルとに基づいて最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する。誘導演算部230は最終段燃焼終了時刻の軌道の予測値と軌道の目標値とを比較し、軌道の予測値と軌道の目標値との差に基づいて新たな推力方向の角度を算出してロケット制御装置に出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、多段式ロケットを誘導する多段式ロケット誘導装置、多段式ロケット誘導プログラム、多段式ロケット誘導方法および多段式ロケット誘導システムに関するものである。
【背景技術】
【0002】
近年、小型衛星の打上げ需要の高まりに伴って空中発射システムが注目されている。
空中発射システムは、飛行体(飛行機など)に搭載したロケットを空中で発射するシステムであり、ロケットを地上から発射する地上発射システムに比べて発射地点の自由度が高い。
【0003】
地上発射システムでは、安全上の理由で飛行経路に制約をあたえるための中間の目標地点を設けることがある。ロケットは中間の目標地点を経由して最終的な目標地点に誘導される。
一方、空中発射システムでは、安全な地点からロケットを発射することができるため中間の目標地点を設ける必要が無く、ロケットを発射したときから最終的な目標地点に誘導することができる。
【0004】
中間の目標地点を必要としない場合、最終的な目標地点への誘導だけを考慮すればよいため、検討すべきパラメータの数が減り、パラメータの検討を行うためのミッション解析期間を短縮することができる。
【0005】
ロケットの種類には、液体燃料を推進剤として用いる液体ロケット(液体燃料ロケットともいう)と、固体燃料を推進剤として用いる固体ロケット(固体燃料ロケットともいう)とが存在する。
【0006】
液体ロケットには、液体燃料の燃焼を止めて推力を停止させることができるという長所がある反面、液体燃料の注入に時間がかかるため発射整備作業に長い時間を要するという短所がある。
一方、固体ロケットの場合、固体燃料の装填に液体燃料ほどの時間はかからないため発射整備作業に要する時間を短縮することができる。但し、固体燃料の燃焼を途中で止めることはできない。
【0007】
上記のように、空中発射システム(または中間の目標地点を要しない場合の地上発射システム)や固体ロケットを使用することにより、ミッション解析期間や発射整備作業に要する時間が短く、緊急の打ち上げ要請にもタイムリーに応えられるという即応性が得られる。
【先行技術文献】
【非特許文献】
【0008】
【非特許文献1】松田,朝隈,山本,池田:空中発射ロケットの誘導研究,第54回宇宙科学技術連合講演会講演集,JSASS−2010−4319,2010.
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、例えば、空中発射システム(または中間の目標地点を要しない場合の地上発射システム)で発射する固体ロケットを正確に目標地点に誘導できるようにすることを目的とする。
【課題を解決するための手段】
【0010】
本発明の多段式ロケット誘導装置は、
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する。
前記多段式ロケット誘導装置は、
前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する誘導演算部とを備える。
【0011】
前記予測演算部は、
前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、次段のロケットエンジンが固体燃料を燃焼し始める予定時刻として予め記憶する次段燃焼開始時刻と、に基づいて前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルと、前記次段燃焼終了時刻と、前記最終段燃焼終了時刻と、前記次段燃焼終了時刻までの推力加速度の予測値を示す次段推力加速度プロファイルと、前記最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する。
【0012】
前記予測演算部は、
前記ロケット制御装置が前記多段式ロケットの推力方向の角度を前記新たな推力方向の角度に変更した後、前記航法装置から新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルとを入力し、前記新たな現在の位置ベクトルと前記新たな現在の速度ベクトルと新たな現在時刻と前記現段燃焼終了時刻と前記現段推力加速度プロファイルとを用いて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを新たに算出する。
【0013】
前記予測演算部は、前記最終段燃焼終了時刻の軌道の予測値を算出し、
前記誘導演算部は、予測値と目標値との差に基づいて、前記多段式ロケットの新たな推力方向の角度を算出する。
【0014】
本発明の多段式ロケット誘導プログラムは、
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する多段式ロケット誘導装置を機能させる。
前記多段式ロケット誘導プログラムは、
前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する誘導演算部として前記多段式ロケット誘導装置を機能させる。
【0015】
前記予測演算部は、
前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、次段のロケットエンジンが固体燃料を燃焼し始める予定時刻として予め記憶する次段燃焼開始時刻と、に基づいて前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルと、前記次段燃焼終了時刻と、前記最終段燃焼終了時刻と、前記次段燃焼終了時刻までの推力加速度の予測値を示す次段推力加速度プロファイルと、前記最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する。
【0016】
前記予測演算部は、
前記ロケット制御装置が前記多段式ロケットの推力方向の角度を前記新たな推力方向の角度に変更した後、前記航法装置から新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルとを入力し、前記新たな現在の位置ベクトルと前記新たな現在の速度ベクトルと新たな現在時刻と前記現段燃焼終了時刻と前記現段推力加速度プロファイルとを用いて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを新たに算出する。
【0017】
前記予測演算部は、前記最終段燃焼終了時刻の軌道の予測値を算出し、
前記誘導演算部は、予測値と目標値との差に基づいて、前記多段式ロケットの新たな推力方向の角度を算出する。
【0018】
本発明の多段式ロケット誘導方法は、
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する多段式ロケット誘導装置によって実行する。
前記多段式ロケット誘導方法において、
予測演算部が、前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出し、
誘導演算部が、前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する。
【0019】
本発明の多段式ロケット誘導システムは、
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置と、
前記多段式ロケットの推力方向を制御するロケット制御装置と、
前記多段式ロケットを誘導する多段式ロケット誘導装置とを備える。
前記多段式ロケット誘導装置は、
前記航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記ロケット制御装置に出力する誘導演算部とを備える。
【発明の効果】
【0020】
本発明によれば、例えば、空中発射システム(または中間の目標地点を要しない場合の地上発射システム)で発射する固体ロケットを正確に目標地点に誘導することができる。
【図面の簡単な説明】
【0021】
【図1】実施の形態1における多段式ロケット誘導システム100の構成図。
【図2】実施の形態1における多段式ロケット誘導システム100による3段式ロケット誘導処理を示すフローチャート。
【図3】実施の形態1における2段誘導演算処理(S120)を示すフローチャート。
【図4】実施の形態1におけるコースト誘導演算処理(S130)を示すフローチャート。
【図5】実施の形態1における3段誘導演算処理(S140)を示すフローチャート。
【図6】実施の形態1における軌道要素の説明図。
【図7】実施の形態1における軌道要素の説明図。
【図8】実施の形態1における多段式ロケット誘導システム100で用いる座標系の一例を示す図。
【図9】実施の形態1におけるロケットのピッチ姿勢角θを定義する図。
【図10】実施の形態1における2段誘導をシミュレーションした際のパラメータを示す表。
【図11】実施の形態1におけるコースト誘導をシミュレーションした際のパラメータを示す表。
【図12】実施の形態1における3段誘導をシミュレーションした際のパラメータを示す表。
【図13】実施の形態1におけるシミュレーションパターンを示す表。
【図14】実施の形態1における誘導アルゴリズムのシミュレーション結果(円軌道)を示すグラフ。
【図15】実施の形態1における誘導アルゴリズムのシミュレーション結果(楕円軌道)を示すグラフ。
【図16】実施の形態1におけるロケット誘導装置200のハードウェア資源の一例を示す図。
【発明を実施するための形態】
【0022】
実施の形態1.
多段式ロケットを目標軌道に誘導するシステムの形態について説明する。
【0023】
図1は、実施の形態1における多段式ロケット誘導システム100の構成図である。
実施の形態1における多段式ロケット誘導システム100の構成について、図1に基づいて説明する。
【0024】
多段式ロケット誘導システム100は、固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導するシステムである。
例えば、多段式ロケット誘導システム100は多段式ロケットに搭載される。但し、多段式ロケット誘導システム100の構成の少なくとも一部を多段式ロケットの外部(例えば、地上の施設)に設けても構わない。
【0025】
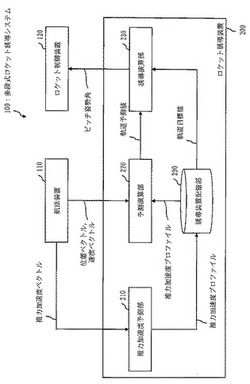
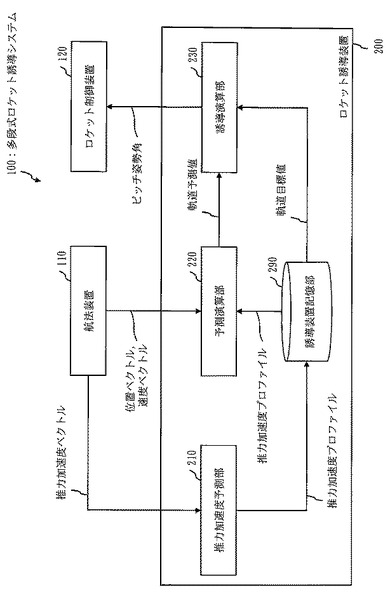
多段式ロケット誘導システム100は、航法装置110と、ロケット制御装置120と、ロケット誘導装置200とを備える。
【0026】
航法装置110は、多段式ロケットの位置ベクトルと速度ベクトルと加速度ベクトル(推力加速度ベクトル)とを航法演算によって計測する装置である。
例えば、航法装置110は慣性計測装置(IMU)とも呼ばれ、ジャイロと加速度計とを備える。航法装置110は、ジャイロによって計測される3軸方向の角速度と加速度計によって計測される3軸方向の加速度(加速度ベクトル)とを積分して3軸方向の速度(速度ベクトル)の変化量と3軸方向の位置(位置ベクトル)の変化量とを算出する。航法装置110は、速度ベクトルの変化量を前回の速度ベクトルに加算して現在の速度ベクトルを算出し、位置ベクトルの変化量を前回の位置ベクトルに加算して現在の位置ベクトルを算出する。
【0027】
ロケット制御装置120は、多段式ロケットの推力方向(ピッチ姿勢角)を制御する装置である。
例えば、ロケット制御装置120は、多段式ロケットの機体やロケットエンジンの噴射向きを制御して多段式ロケットの推力方向を制御する。
【0028】
ロケット誘導装置200(多段式ロケット誘導装置の一例)は、多段式ロケットを誘導するための演算を行う装置(コンピュータ)である。
【0029】
ロケット誘導装置200は、推力加速度予測部210と、予測演算部220と、誘導演算部230と、誘導装置記憶部290とを備える。
【0030】
推力加速度予測部210は、航法装置110によって計測された推力加速度ベクトルに基づいて推力加速度プロファイルを更新する。
推力加速度プロファイルは、ロケットエンジンの各時刻(経過時間)の推力加速度の予測値を示すデータである。例えば、推力加速度プロファイルは、各段のロケットエンジンが固体燃料を燃焼し始める予定時刻(推力加速度がゼロから上昇する時刻)や各段のロケットエンジンが固体燃料を燃焼し終わる予定時刻(推力加速度がゼロになる時刻)を示す。
【0031】
予測演算部220は、航法装置110から多段式ロケットの現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、誘導装置記憶部290から各段の推力加速度プロファイルを取得する。
予測演算部220は、現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる現段燃焼終了時刻と、現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出する。
予測演算部220は、算出した現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる最終段燃焼終了時刻と、最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて最終段燃焼終了時刻の軌道の予測値(軌道予測値)を積分計算によって算出する。
【0032】
例えば、予測演算部220は、以下のように最終段燃焼終了時刻の軌道の予測値を算出する。
予測演算部220は、現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、現段燃焼終了時刻と、次段のロケットエンジンが固体燃料を燃焼し始める次段燃焼開始時刻と、に基づいて次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出する。
予測演算部220は、算出した次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルと、次段燃焼終了時刻と、最終段燃焼終了時刻と、次段燃焼終了時刻までの推力加速度の予測値を示す次段推力加速度プロファイルと、最終段推力加速度プロファイルと、に基づいて最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する。
【0033】
予測演算部220は、ロケット制御装置120が多段式ロケットの推力方向の角度を新たな推力方向の角度に変更した後、航法装置110から新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルとを入力する。また、予測演算部220は、誘導装置記憶部290から新たな現段推力加速度プロファイルを入力する。 予測演算部220は、新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルと新たな現在時刻と現段燃焼終了時刻と現段推力加速度プロファイルとを用いて現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを新たに算出し、最終段燃焼終了時刻の軌道の予測値を新たに算出する。
【0034】
例えば、予測演算部220は、最終段燃焼終了時刻の軌道の予測値として近地点高度の予測値と遠地点高度の予測値とを算出する。
【0035】
誘導演算部230は、予測演算部220によって算出された最終段燃焼終了時刻の軌道の予測値(軌道予測値)と所定の軌道の目標値(軌道目標値)とを比較する。
誘導演算部230は、最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値との差に基づいて多段式ロケットの新たな推力方向の角度(ピッチ姿勢角)を算出する。
誘導演算部230は、算出した多段式ロケットの新たな推力方向の角度をロケット制御装置120に出力する。
【0036】
例えば、誘導演算部230は、近地点高度の予測値と近地点高度の目標値との差と、遠地点高度の予測値と遠地点高度の目標値との差とに基づいて、多段式ロケットの新たな推力方向の角度を算出する。
【0037】
誘導装置記憶部290は、ロケット誘導装置200で使用するデータを記憶する。
推力加速度プロファイル、位置ベクトル、速度ベクトル、推力加速度ベクトル、軌道予測値、軌道目標値およびピッチ姿勢角は、誘導装置記憶部290に記憶するデータの一例である。
【0038】
以下、多段式ロケット誘導システム100が3段式ロケット(多段式ロケットの一例)を誘導する場合について説明する。
但し、多段式ロケット誘導システム100が誘導する多段式ロケットは2段式ロケットであっても4段以上の多段式ロケットであっても構わない。
【0039】
図2は、実施の形態1における多段式ロケット誘導システム100による3段式ロケット誘導処理を示すフローチャートである。
実施の形態1における多段式ロケット誘導システム100による3段式ロケット誘導処理(多段式ロケット誘導方法、多段式ロケット誘導プログラムの一例)について、図2に基づいて説明する。
【0040】
以下、3段式ロケット(多段式ロケットの一例)を単に「ロケット」という。
以下、第n段(n:1以上の整数)のロケットエンジンが固体燃料を燃焼しているときに行うロケットの誘導を「n段誘導」という。
また、前段のロケットエンジンが固体燃料を燃焼し終わって切り離されてから次段のロケットエンジンが固体燃料を燃焼し始めるまでのロケットの誘導、特に、2段誘導の終了時から3段誘導の開始時までのロケットの誘導を「コースト誘導」という。
【0041】
図2に示す3段式ロケット誘導処理では2段誘導以降の処理を説明する。
図示省略する1段誘導(1段誘導の終了時から2段誘導の開始時までのコースト誘導を含む)において、多段式ロケット誘導システム100は、所定の誘導処理(例えば、従来の誘導処理)によってロケットのヨー姿勢角(方位角)を調整してロケットを目標の軌道面に誘導する。目標の軌道面は、目標の軌道(円または楕円)を含んだ平面である。
多段式ロケット誘導システム100は、図2に示す2段誘導以降の処理によってロケットのピッチ姿勢角を調整してロケットを目標の軌道に誘導する。
【0042】
多段式ロケット誘導システム100は、図2に示す3段式ロケット誘導処理を3段の燃焼が終了するまで周期的(例えば、1または2秒毎)に実行する。
つまり、多段式ロケット誘導システム100は、ロケットのピッチ姿勢角(推力方向)を周期的に正しい角度に調整する。
【0043】
S110において、予測演算部220は、現在の誘導が2段誘導とコースト誘導と3段誘導とのいずれであるかを判定する。
現在の誘導がいずれの誘導であるかを示すデータはロケットエンジンの切り離し時や固体燃料の燃焼開始時に誘導装置記憶部290に記憶されるものとする。
現在の誘導が2段誘導である場合、S120に進む。
現在の誘導がコースト誘導である場合、S130に進む。
現在の誘導が3段誘導である場合、S140に進む。
【0044】
S120において、予測演算部220は、後述する2段誘導予測演算処理によって最終段(3段)の燃焼終了時の軌道予測値(例えば、近地点高度や遠地点高度の予測値)を算出する。
S120の後、S150に進む。
【0045】
S130において、予測演算部220は、後述するコースト誘導予測演算処理によって最終段(3段)の燃焼終了時の軌道予測値を算出する。
S130の後、S150に進む。
【0046】
S140において、予測演算部220は、後述する3段誘導予測演算処理によって最終段(3段)の燃焼終了時の軌道予測値を算出する。
S140の後、S150に進む。
【0047】
S150において、誘導演算部230は、S120、S130またはS140で算出された軌道予測値と、誘導装置記憶部290に予め記憶する軌道目標値との値差を算出する。例えば、誘導演算部230は、各軌道要素の目標値と予測値との差を二乗して合計した二乗和を軌道予測値と軌道目標値との値差として算出する。
S150の後、S151に進む。
【0048】
S151において、誘導演算部230は、S150で算出した軌道予測値と軌道目標値との値差と、誘導装置記憶部290に予め記憶する誘導閾値とを比較する。
軌道予測値と軌道目標値との値差が誘導閾値未満である場合、ロケットは目標の軌道に向けて正しく誘導されているため、今回の周期の3段式ロケット誘導処理を終了する。
軌道予測値と軌道目標値との値差が誘導閾値以上である場合、S160に進む。
【0049】
S160において、誘導演算部230は、S150で算出した軌道予測値と軌道目標値との値差に基づいてロケットの新たな独立変数を算出する。
独立変数とは、例えばピッチ姿勢角、後述するステアリング係数、最終段燃焼開始時刻である。
【0050】
例えば、誘導演算部230は、以下のようにロケットの新たな独立変数を算出する。
【0051】
誘導演算部230は、以下の関係式(1)を用いて独立変数を更新する更新量を表す更新量ベクトルΔCを算出する。つまり、誘導演算部230は、感度行列Jの疑似逆行列に軌道目標値と軌道予測値との値差を表す誤差ベクトルΔyを乗じて更新量ベクトルΔCを算出する。感度行列Jは、軌道予測値を独立変数で偏微分して得られるヤコビ行列である。
【0052】
誘導演算部230は、関係式(1)を用いて算出した更新量ベクトルΔCが表す独立変数の更新量を現在の独立変数に加算して新たな独立変数を算出する。
誘導演算部230のうちS120およびS140は、新たな独立変数のうちステアリング係数を式(2)に設定し、時間変数tに現在時刻から現段燃焼終了時刻までの時間および3段燃焼開始時刻から3段燃焼終了時刻までの時間を代入して式(2)を計算する。
【0053】
式(2)は、ロケットの新たなピッチ姿勢角θのタンジェント値tanθを計算するための時間変数tの2次式である。式(2)を「2次タンジェント則」という。
【0054】
誘導演算部230は、式(2)の代わりに式(3)を用いても構わない。
式(3)は、ロケットの新たなピッチ姿勢角θのタンジェント値tanθを計算するための時間変数tの1次式である。式(3)を「リニアタンジェント則」という。
【0055】
例えば、誘導演算部230は、2段誘導時には2次タンジェント則を用い、3段誘導時にはリニアタンジェント則を用いる。
但し、誘導演算部230は、2段誘導時および3段誘導時に2次タンジェント則とリニアタンジェント則とのどちらを用いてもよい。
【0056】
【数1】

【0057】
S160の後、S110に戻り、軌道目標値と軌道予測値との値差が誘導閾値未満に収束するまでS110からS160の処理を繰り返す。
【0058】
図2に示した3段式ロケット誘導処理を3段の燃焼が終了するまで周期的に繰り返すことにより、ロケットを目標の軌道に誘導することができる。
【0059】
図3は、実施の形態1における2段誘導演算処理(S120)を示すフローチャートである。
実施の形態1における2段誘導演算処理(S120)について、図3に基づいて説明する。
【0060】
S121において、推力加速度予測部210は、航法装置110からロケットの現在の加速度ベクトル(推力加速度ベクトル)を取得し、取得した現在の加速度ベクトルに基づいて所定の更新処理によって2段推力加速度プロファイルを更新する。
【0061】
また、予測演算部220は、航法装置110からロケットの現在の位置ベクトルと速度ベクトルとを入力する。さらに、予測演算部220は、2段の固体燃料の燃焼が終了する2段燃焼終了時刻と、現在時刻から2段燃焼終了時刻までの各時刻の推力加速度とを推力加速度プロファイルから取得する。
予測演算部220は、現在の位置ベクトルと、現在の速度ベクトルと、現在時刻と、2段燃焼終了時刻と、現在時刻から2段燃焼終了時刻までの各時刻の推力加速度と、を入力にして所定の予測演算関数を演算し、2段燃焼終了時刻の位置ベクトルと速度ベクトルとを算出する。
【0062】
予測演算関数の演算において、予測演算部220は、現在時刻から2段燃焼終了時刻まで推力加速度の積分計算を行い、現在時刻から2段燃焼終了時刻までの速度ベクトルと位置ベクトルとの変位量を算出する。さらに、予測演算部220は、速度ベクトルの変位量を現在の速度ベクトルに加算して2段燃焼終了時刻の速度ベクトルを算出し、位置ベクトルの変位量を現在の位置ベクトルに加算して2段燃焼終了時刻の位置ベクトルを算出する。
S121の後、S122に進む。
【0063】
S122において、2段燃焼終了時刻から3段燃焼開始時刻までの間はいずれのロケットエンジンも稼働していないため、各時刻の推力加速度はゼロである。
予測演算部220は、2段燃焼終了時刻の位置ベクトルと、2段燃焼終了時刻の速度ベクトルと、現在時刻と、3段燃焼開始時刻と、を入力にして予測演算関数を演算する。予測演算関数の演算において、予測演算部220は、S121と同様に積分計算によって3段燃焼開始時刻の位置ベクトルと速度ベクトルとを算出する。
S122の後、S123に進む。
【0064】
S123において、予測演算部220は、3段の固体燃料の燃焼が終了する3段燃焼終了時刻と、3段燃焼開始時刻から3段燃焼終了時刻までの各時刻の推力加速度とを推力加速度プロファイルから取得する。
予測演算部220は、3段燃焼開始時刻の位置ベクトルと、3段燃焼開始時刻の速度ベクトルと、現在時刻と、3段燃焼終了時刻と、3段燃焼開始時刻から3段燃焼終了時刻までの各時刻の推力加速度と、を入力にして予測演算関数を演算する。予測演算関数の演算において、予測演算部220は、S121と同様に積分計算によって3段燃焼終了時刻の位置ベクトルと速度ベクトルとを算出する。
【0065】
さらに、予測演算部220は、例えば3段燃焼終了時刻の位置ベクトルと速度ベクトルとに基づいて軌道要素の予測値(軌道要素予測値)を算出する。
軌道要素および軌道要素予測値の算出方法については別途説明する。
S123により、2段誘導演算処理(S120)は終了する。
【0066】
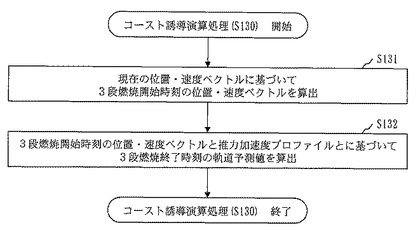
図4は、実施の形態1におけるコースト誘導演算処理(S130)を示すフローチャートである。
実施の形態1におけるコースト誘導演算処理(S130)について、図4に基づいて説明する。
【0067】
S131において、予測演算部220は、航法装置110からロケットの現在の位置ベクトルと速度ベクトルとを入力する。現在時刻から3段燃焼開始時刻までの間はいずれのロケットエンジンも稼働していないため、各時刻の推力加速度はゼロである。
予測演算部220は、現在の位置ベクトルと、現在の速度ベクトルと、現在時刻と、3段燃焼開始時刻と、を入力にして予測演算関数を演算する。予測演算関数の演算において、予測演算部220は、図3のS121と同様に積分計算によって3段燃焼開始時刻の位置ベクトルと速度ベクトルとを算出する。
S131の後、S132に進む。
【0068】
S132において、予測演算部220は、3段の固体燃料の燃焼が終了する3段燃焼終了時刻と、3段燃焼開始時刻から3段燃焼終了時刻までの各時刻の推力加速度とを推力加速度プロファイルから取得する。
予測演算部220は、3段燃焼開始時刻の位置ベクトルと、3段燃焼開始時刻の速度ベクトルと、現在時刻と、3段燃焼終了時刻と、3段燃焼開始時刻から3段燃焼終了時刻までの各時刻の推力加速度と、を入力にして予測演算関数を演算する。予測演算関数の演算において、予測演算部220は、図3のS121と同様に積分計算によって3段燃焼終了時刻の位置ベクトルと速度ベクトルとを算出する。
【0069】
さらに、予測演算部220は、例えば3段燃焼終了時刻の位置ベクトルと速度ベクトルとに基づいて軌道要素予測値を算出する。
軌道要素予測値の算出方法については別途説明する。
S132により、コースト誘導演算処理(S130)は終了する。
【0070】
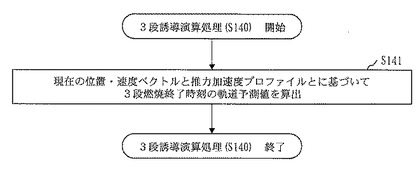
図5は、実施の形態1における3段誘導演算処理(S140)を示すフローチャートである。
実施の形態1における3段誘導演算処理(S140)について、図5に基づいて説明する。
【0071】
S141において、推力加速度予測部210は、航法装置110からロケットの現在の加速度ベクトル(推力加速度ベクトル)を取得し、取得した現在の加速度ベクトルに基づいて所定の更新処理によって3段推力加速度プロファイルを更新する。
【0072】
また、予測演算部220は、航法装置110からロケットの現在の位置ベクトルと速度ベクトルとを入力する。さらに、予測演算部220は、3段の固体燃料の燃焼が終了する3段燃焼終了時刻と、現在時刻から3段燃焼終了時刻までの各時刻の推力加速度とを推力加速度プロファイルから取得する。
予測演算部220は、現在の位置ベクトルと、現在の速度ベクトルと、現在時刻と、3段燃焼終了時刻と、現在時刻から3段燃焼終了時刻までの各時刻の推力加速度と、を入力にして予測演算関数を演算する。予測演算関数の演算において、予測演算部220は、図3のS121と同様に積分計算によって3段燃焼終了時刻の位置ベクトルと速度ベクトルとを算出する。
【0073】
さらに、予測演算部220は、例えば3段燃焼終了時刻の位置ベクトルと速度ベクトルとに基づいて軌道要素予測値を算出する。
軌道要素予測値の算出方法については別途説明する。
S141により、3段誘導演算処理(S140)は終了する。
【0074】
図6、図7は、実施の形態1における軌道要素の説明図である。
実施の形態1における軌道要素について、図6、図7に基づいて説明する。
【0075】
軌道要素は、軌道の大きさを表す項目である。
軌道要素として、近地点高度、遠地点高度、軌道長半径、軌道傾斜角、近地点引数、真近点離角、などが挙げられる。これらの軌道要素について以下に説明する。
ロケット誘導装置200は例えば1つまたは複数の軌道要素を用いる。
【0076】
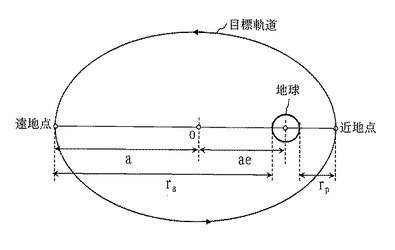
目標軌道は、地球の重心を焦点とする楕円軌道(または円軌道)である。目標軌道内でのロケットの進行方向を矢印で記す。
近地点は目標軌道内で地球重心から最も近い点であり、地球重心から近地点までの距離を近地点半径という。「近地点高度rp」は近地点半径から地球の赤道半径を引いた距離である。
遠地点は目標軌道内で地球重心から最も遠い点であり、地球重心から遠地点までの距離を遠地点半径という。「遠地点高度ra」は遠地点半径から地球の赤道半径を引いた距離である。
【0077】
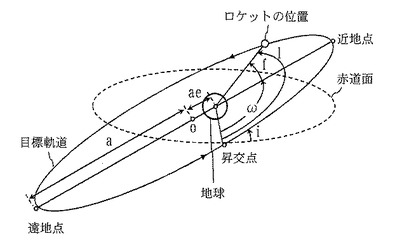
「軌道長半径a」は目標軌道の中心oから遠地点までの距離である。
「軌道傾斜角i」は目標軌道と地球の赤道面とが成す角度である。
【0078】
昇交点は目標軌道と地球の赤道面とが交わる点(地球の南半球から北半球への通過点)である。
「近地点引数ω」は昇交点から近地点までの角度(ロケットの進行方向側の角度)である。
【0079】
「真近点離角f」は近地点からロケットの位置までの角度(ロケットの進行方向側の角度)である。
【0080】
また、目標軌道の中心oから地球重心までの距離aeの軌道長半径aに対する比率を離心率eといい、昇交点からロケットの位置までの角度(ロケットの進行方向側の角度)を緯度引数lという。
【0081】
以下に、位置ベクトルrと速度ベクトルvとに基づいて各軌道要素の予測値(軌道要素予測値)を算出する算出式を以下に示す。
【0082】
【数2】
【0083】
【数3】
【0084】
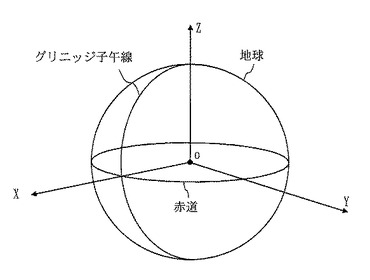
図8は、実施の形態1における多段式ロケット誘導システム100で用いる座標系の一例を示す図である。
図8に示すように、例えば、地球中心(または地球重心)を座標系の「原点o」とし、原点oからグリニッジ子午線と赤道との交点を通る方向を「X軸方向」とし、北極方向(北方向)を「Z軸方向」とし、Z軸とX軸とに直交し右手系を成す方向を「Y軸方向」とする。
【0085】
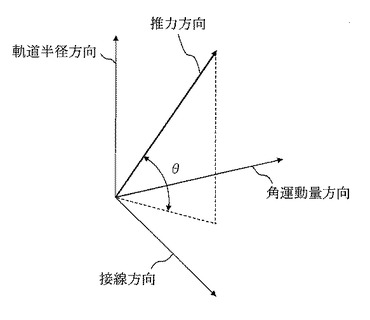
図9は、実施の形態1におけるロケットのピッチ姿勢角θを定義する図である。
図9に示すように、ロケットのピッチ角θは接線方向と角運動量方向とを含んだ平面に対して推力方向が成す角度である。ロケットのピッチ姿勢角θが表す方向は、ロケットの推力方向とみなすことができる。
接線方向は「(位置ベクトル×速度ベクトル)×位置ベクトル」(「×」は外積を表す)で定義される方向である。
軌道半径方向は位置ベクトルの向きに相当する方向である。
角運動量方向は接線方向と軌道半径方向とに対して垂直な方向であり、「位置ベクトル×速度ベクトル」(「×」は外積を表す)で定義される。
【0086】
次に、図2から図4で説明した多段式ロケットの誘導アルゴリズムをシミュレーションした結果について説明する。
【0087】
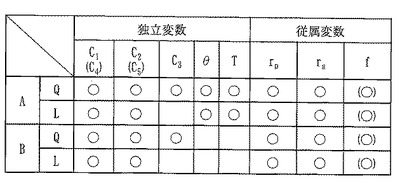
図10は、実施の形態1における2段誘導をシミュレーションした際のパラメータを示す表である。
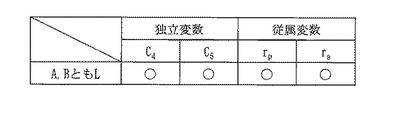
図11は、実施の形態1におけるコースト誘導をシミュレーションした際のパラメータを示す表である。
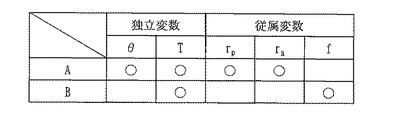
図12は、実施の形態1における3段誘導をシミュレーションした際のパラメータを示す表である。
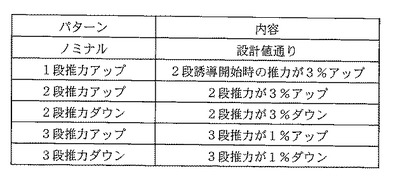
図13は、実施の形態1におけるシミュレーションパターンを示す表である。
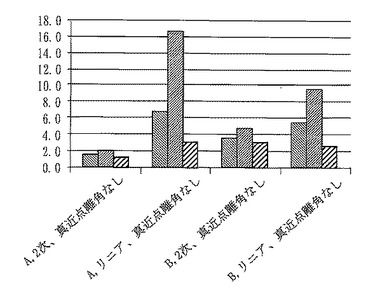
図14は、実施の形態1における誘導アルゴリズムのシミュレーション結果(円軌道)を示すグラフである。
図15は、実施の形態1における誘導アルゴリズムのシミュレーション結果(楕円軌道)を示すグラフである。
【0088】
図10から図12においてシミュレーションで使用したパラメータを「○」で記す。
図10から図15に示す各記号の意味は以下の通りである。
「A」は実施の形態1における誘導アルゴリズム(中間目標値を設定せずに全段を統合したロジック)を意味する。
「B」は従来の誘導アルゴリズム(各段毎に中間目標値を設定するロジック)を意味する。
「Q」は2次タンジェント則を意味する。
「L」はリニアタンジェント則を意味する。
「CX」はステアリング係数を意味する。
「θ」は3段燃焼中のロケットのピッチ姿勢角を示す。
「T」は図10においては2段燃焼終了時刻から3段燃焼開始時刻までの時間を示し、図11においては現在時刻から3段燃焼開始時刻までの時間を示す。
「rp」は近地点高度を示す。
「ra」は遠地点高度を示す。
「f」は真近点離角を示す。
【0089】
図10において、Aの従属変数(rp,ra,f)は3段燃焼終了時刻の値であり、Bの従属変数は2段燃焼終了時刻の値である。また、真近点離角fは楕円軌道のシミュレーションでは含め、円軌道のシミュレーションでは含めない。
図11において、近地点高度rpと遠地点高度raとは3段燃焼終了時刻の値であり、真近点離角fは3段燃焼開始時刻の値である。
図12において、従属変数(rp,ra)は3段燃焼終了時刻の値である。
【0090】
図13に示す6パターンのシミュレーション結果のRSS(Root Summed Square)値を図14、15に示す。
図14は、目標の円軌道(500×500キロメートル)に対する近地点高度、遠地点高度および軌道長半径の誤差(単位:キロメートル)を示している。
図15は、目標の円軌道(500×250キロメートル)に対する近地点高度、遠地点高度および軌道長半径の誤差(単位:キロメートル)を示している。
【0091】
図14、図15に示すように、実施の形態1における誘導アルゴリズム「A」と2次タンジェント則「2次」との組み合わせが最も誤差が小さく、ロケットを正確に目標軌道に誘導することができる。
実施の形態1における誘導アルゴリズム「A」とリニアタンジェント則「リニア」との組み合わせで誤差が大きいケースがあるが、これは、この組み合せでは、誘導アルゴリズム「A」と2次タンジェント則「2次」との組み合わせに比べてロバスト性が落ちるため、精度が悪くなったケースがあったためである。
【0092】
図16は、実施の形態1におけるロケット誘導装置200のハードウェア資源の一例を示す図である。
図16において、ロケット誘導装置200は、CPU911(Central Processing Unit)を備えている。CPU911は、バス912を介してROM913、RAM914、通信ボード915と接続され、これらのハードウェアデバイスを制御する。通信ボード915は、有線または無線でネットワークに接続している。
【0093】
ROMまたはRAMには、OS(オペレーティングシステム)、プログラム群、ファイル群が記憶されている。
【0094】
プログラム群には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラム(例えば、多段式ロケット誘導プログラム)は、CPU911により読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0095】
ファイル群には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0096】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
フローチャートなどに基づいて説明する実施の形態の処理はCPU911やその他のハードウェアを用いて実行される。
【0097】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0098】
実施の形態1において、多段式ロケットを目標軌道に誘導するシステムについて説明した。
実施の形態1により、固体燃料を用いる多段式ロケットを中間の目標地点を経由せずに高い精度で目標軌道に誘導することができる。また、固体燃料を用いることにより発射整備作業の時間を短縮し、中間の目標地点を設定しないことによりミッション解析期間を短縮することができる。
つまり、実施の形態1により、緊急の打ち上げ要請にもタイムリーに応えられるという即応性を有した上で、多段式ロケットを目標軌道に高い精度で誘導することができる。
【0099】
実施の形態1では3段式ロケットを例に挙げて説明したが、2段式ロケットまたは4段以上の多段式ロケットを誘導しても構わない。誘導方法は3段式ロケットと同様である。
実施の形態1では2段誘導以降でロケットのピッチ姿勢角(推力方向)を調整するアルゴリズムを例に挙げて説明したが、1段誘導時や1段誘導の終了時から2段誘導の開始時までのコースト誘導時においてもロケットのピッチ姿勢角を調整しても構わない。調整方法は2段誘導時や2段誘導の終了時から3段誘導の開始時までのコースト誘導時と同様である。
【符号の説明】
【0100】
100 多段式ロケット誘導システム、110 航法装置、120 ロケット制御装置、200 ロケット誘導装置、210 推力加速度予測部、220 予測演算部、230 誘導演算部、290 誘導装置記憶部、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード。
【技術分野】
【0001】
本発明は、多段式ロケットを誘導する多段式ロケット誘導装置、多段式ロケット誘導プログラム、多段式ロケット誘導方法および多段式ロケット誘導システムに関するものである。
【背景技術】
【0002】
近年、小型衛星の打上げ需要の高まりに伴って空中発射システムが注目されている。
空中発射システムは、飛行体(飛行機など)に搭載したロケットを空中で発射するシステムであり、ロケットを地上から発射する地上発射システムに比べて発射地点の自由度が高い。
【0003】
地上発射システムでは、安全上の理由で飛行経路に制約をあたえるための中間の目標地点を設けることがある。ロケットは中間の目標地点を経由して最終的な目標地点に誘導される。
一方、空中発射システムでは、安全な地点からロケットを発射することができるため中間の目標地点を設ける必要が無く、ロケットを発射したときから最終的な目標地点に誘導することができる。
【0004】
中間の目標地点を必要としない場合、最終的な目標地点への誘導だけを考慮すればよいため、検討すべきパラメータの数が減り、パラメータの検討を行うためのミッション解析期間を短縮することができる。
【0005】
ロケットの種類には、液体燃料を推進剤として用いる液体ロケット(液体燃料ロケットともいう)と、固体燃料を推進剤として用いる固体ロケット(固体燃料ロケットともいう)とが存在する。
【0006】
液体ロケットには、液体燃料の燃焼を止めて推力を停止させることができるという長所がある反面、液体燃料の注入に時間がかかるため発射整備作業に長い時間を要するという短所がある。
一方、固体ロケットの場合、固体燃料の装填に液体燃料ほどの時間はかからないため発射整備作業に要する時間を短縮することができる。但し、固体燃料の燃焼を途中で止めることはできない。
【0007】
上記のように、空中発射システム(または中間の目標地点を要しない場合の地上発射システム)や固体ロケットを使用することにより、ミッション解析期間や発射整備作業に要する時間が短く、緊急の打ち上げ要請にもタイムリーに応えられるという即応性が得られる。
【先行技術文献】
【非特許文献】
【0008】
【非特許文献1】松田,朝隈,山本,池田:空中発射ロケットの誘導研究,第54回宇宙科学技術連合講演会講演集,JSASS−2010−4319,2010.
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、例えば、空中発射システム(または中間の目標地点を要しない場合の地上発射システム)で発射する固体ロケットを正確に目標地点に誘導できるようにすることを目的とする。
【課題を解決するための手段】
【0010】
本発明の多段式ロケット誘導装置は、
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する。
前記多段式ロケット誘導装置は、
前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する誘導演算部とを備える。
【0011】
前記予測演算部は、
前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、次段のロケットエンジンが固体燃料を燃焼し始める予定時刻として予め記憶する次段燃焼開始時刻と、に基づいて前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルと、前記次段燃焼終了時刻と、前記最終段燃焼終了時刻と、前記次段燃焼終了時刻までの推力加速度の予測値を示す次段推力加速度プロファイルと、前記最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する。
【0012】
前記予測演算部は、
前記ロケット制御装置が前記多段式ロケットの推力方向の角度を前記新たな推力方向の角度に変更した後、前記航法装置から新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルとを入力し、前記新たな現在の位置ベクトルと前記新たな現在の速度ベクトルと新たな現在時刻と前記現段燃焼終了時刻と前記現段推力加速度プロファイルとを用いて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを新たに算出する。
【0013】
前記予測演算部は、前記最終段燃焼終了時刻の軌道の予測値を算出し、
前記誘導演算部は、予測値と目標値との差に基づいて、前記多段式ロケットの新たな推力方向の角度を算出する。
【0014】
本発明の多段式ロケット誘導プログラムは、
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する多段式ロケット誘導装置を機能させる。
前記多段式ロケット誘導プログラムは、
前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する誘導演算部として前記多段式ロケット誘導装置を機能させる。
【0015】
前記予測演算部は、
前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、次段のロケットエンジンが固体燃料を燃焼し始める予定時刻として予め記憶する次段燃焼開始時刻と、に基づいて前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルと、前記次段燃焼終了時刻と、前記最終段燃焼終了時刻と、前記次段燃焼終了時刻までの推力加速度の予測値を示す次段推力加速度プロファイルと、前記最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する。
【0016】
前記予測演算部は、
前記ロケット制御装置が前記多段式ロケットの推力方向の角度を前記新たな推力方向の角度に変更した後、前記航法装置から新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルとを入力し、前記新たな現在の位置ベクトルと前記新たな現在の速度ベクトルと新たな現在時刻と前記現段燃焼終了時刻と前記現段推力加速度プロファイルとを用いて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを新たに算出する。
【0017】
前記予測演算部は、前記最終段燃焼終了時刻の軌道の予測値を算出し、
前記誘導演算部は、予測値と目標値との差に基づいて、前記多段式ロケットの新たな推力方向の角度を算出する。
【0018】
本発明の多段式ロケット誘導方法は、
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する多段式ロケット誘導装置によって実行する。
前記多段式ロケット誘導方法において、
予測演算部が、前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出し、
誘導演算部が、前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する。
【0019】
本発明の多段式ロケット誘導システムは、
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置と、
前記多段式ロケットの推力方向を制御するロケット制御装置と、
前記多段式ロケットを誘導する多段式ロケット誘導装置とを備える。
前記多段式ロケット誘導装置は、
前記航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記ロケット制御装置に出力する誘導演算部とを備える。
【発明の効果】
【0020】
本発明によれば、例えば、空中発射システム(または中間の目標地点を要しない場合の地上発射システム)で発射する固体ロケットを正確に目標地点に誘導することができる。
【図面の簡単な説明】
【0021】
【図1】実施の形態1における多段式ロケット誘導システム100の構成図。
【図2】実施の形態1における多段式ロケット誘導システム100による3段式ロケット誘導処理を示すフローチャート。
【図3】実施の形態1における2段誘導演算処理(S120)を示すフローチャート。
【図4】実施の形態1におけるコースト誘導演算処理(S130)を示すフローチャート。
【図5】実施の形態1における3段誘導演算処理(S140)を示すフローチャート。
【図6】実施の形態1における軌道要素の説明図。
【図7】実施の形態1における軌道要素の説明図。
【図8】実施の形態1における多段式ロケット誘導システム100で用いる座標系の一例を示す図。
【図9】実施の形態1におけるロケットのピッチ姿勢角θを定義する図。
【図10】実施の形態1における2段誘導をシミュレーションした際のパラメータを示す表。
【図11】実施の形態1におけるコースト誘導をシミュレーションした際のパラメータを示す表。
【図12】実施の形態1における3段誘導をシミュレーションした際のパラメータを示す表。
【図13】実施の形態1におけるシミュレーションパターンを示す表。
【図14】実施の形態1における誘導アルゴリズムのシミュレーション結果(円軌道)を示すグラフ。
【図15】実施の形態1における誘導アルゴリズムのシミュレーション結果(楕円軌道)を示すグラフ。
【図16】実施の形態1におけるロケット誘導装置200のハードウェア資源の一例を示す図。
【発明を実施するための形態】
【0022】
実施の形態1.
多段式ロケットを目標軌道に誘導するシステムの形態について説明する。
【0023】
図1は、実施の形態1における多段式ロケット誘導システム100の構成図である。
実施の形態1における多段式ロケット誘導システム100の構成について、図1に基づいて説明する。
【0024】
多段式ロケット誘導システム100は、固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導するシステムである。
例えば、多段式ロケット誘導システム100は多段式ロケットに搭載される。但し、多段式ロケット誘導システム100の構成の少なくとも一部を多段式ロケットの外部(例えば、地上の施設)に設けても構わない。
【0025】
多段式ロケット誘導システム100は、航法装置110と、ロケット制御装置120と、ロケット誘導装置200とを備える。
【0026】
航法装置110は、多段式ロケットの位置ベクトルと速度ベクトルと加速度ベクトル(推力加速度ベクトル)とを航法演算によって計測する装置である。
例えば、航法装置110は慣性計測装置(IMU)とも呼ばれ、ジャイロと加速度計とを備える。航法装置110は、ジャイロによって計測される3軸方向の角速度と加速度計によって計測される3軸方向の加速度(加速度ベクトル)とを積分して3軸方向の速度(速度ベクトル)の変化量と3軸方向の位置(位置ベクトル)の変化量とを算出する。航法装置110は、速度ベクトルの変化量を前回の速度ベクトルに加算して現在の速度ベクトルを算出し、位置ベクトルの変化量を前回の位置ベクトルに加算して現在の位置ベクトルを算出する。
【0027】
ロケット制御装置120は、多段式ロケットの推力方向(ピッチ姿勢角)を制御する装置である。
例えば、ロケット制御装置120は、多段式ロケットの機体やロケットエンジンの噴射向きを制御して多段式ロケットの推力方向を制御する。
【0028】
ロケット誘導装置200(多段式ロケット誘導装置の一例)は、多段式ロケットを誘導するための演算を行う装置(コンピュータ)である。
【0029】
ロケット誘導装置200は、推力加速度予測部210と、予測演算部220と、誘導演算部230と、誘導装置記憶部290とを備える。
【0030】
推力加速度予測部210は、航法装置110によって計測された推力加速度ベクトルに基づいて推力加速度プロファイルを更新する。
推力加速度プロファイルは、ロケットエンジンの各時刻(経過時間)の推力加速度の予測値を示すデータである。例えば、推力加速度プロファイルは、各段のロケットエンジンが固体燃料を燃焼し始める予定時刻(推力加速度がゼロから上昇する時刻)や各段のロケットエンジンが固体燃料を燃焼し終わる予定時刻(推力加速度がゼロになる時刻)を示す。
【0031】
予測演算部220は、航法装置110から多段式ロケットの現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、誘導装置記憶部290から各段の推力加速度プロファイルを取得する。
予測演算部220は、現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる現段燃焼終了時刻と、現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出する。
予測演算部220は、算出した現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる最終段燃焼終了時刻と、最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて最終段燃焼終了時刻の軌道の予測値(軌道予測値)を積分計算によって算出する。
【0032】
例えば、予測演算部220は、以下のように最終段燃焼終了時刻の軌道の予測値を算出する。
予測演算部220は、現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、現段燃焼終了時刻と、次段のロケットエンジンが固体燃料を燃焼し始める次段燃焼開始時刻と、に基づいて次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出する。
予測演算部220は、算出した次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルと、次段燃焼終了時刻と、最終段燃焼終了時刻と、次段燃焼終了時刻までの推力加速度の予測値を示す次段推力加速度プロファイルと、最終段推力加速度プロファイルと、に基づいて最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する。
【0033】
予測演算部220は、ロケット制御装置120が多段式ロケットの推力方向の角度を新たな推力方向の角度に変更した後、航法装置110から新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルとを入力する。また、予測演算部220は、誘導装置記憶部290から新たな現段推力加速度プロファイルを入力する。 予測演算部220は、新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルと新たな現在時刻と現段燃焼終了時刻と現段推力加速度プロファイルとを用いて現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを新たに算出し、最終段燃焼終了時刻の軌道の予測値を新たに算出する。
【0034】
例えば、予測演算部220は、最終段燃焼終了時刻の軌道の予測値として近地点高度の予測値と遠地点高度の予測値とを算出する。
【0035】
誘導演算部230は、予測演算部220によって算出された最終段燃焼終了時刻の軌道の予測値(軌道予測値)と所定の軌道の目標値(軌道目標値)とを比較する。
誘導演算部230は、最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値との差に基づいて多段式ロケットの新たな推力方向の角度(ピッチ姿勢角)を算出する。
誘導演算部230は、算出した多段式ロケットの新たな推力方向の角度をロケット制御装置120に出力する。
【0036】
例えば、誘導演算部230は、近地点高度の予測値と近地点高度の目標値との差と、遠地点高度の予測値と遠地点高度の目標値との差とに基づいて、多段式ロケットの新たな推力方向の角度を算出する。
【0037】
誘導装置記憶部290は、ロケット誘導装置200で使用するデータを記憶する。
推力加速度プロファイル、位置ベクトル、速度ベクトル、推力加速度ベクトル、軌道予測値、軌道目標値およびピッチ姿勢角は、誘導装置記憶部290に記憶するデータの一例である。
【0038】
以下、多段式ロケット誘導システム100が3段式ロケット(多段式ロケットの一例)を誘導する場合について説明する。
但し、多段式ロケット誘導システム100が誘導する多段式ロケットは2段式ロケットであっても4段以上の多段式ロケットであっても構わない。
【0039】
図2は、実施の形態1における多段式ロケット誘導システム100による3段式ロケット誘導処理を示すフローチャートである。
実施の形態1における多段式ロケット誘導システム100による3段式ロケット誘導処理(多段式ロケット誘導方法、多段式ロケット誘導プログラムの一例)について、図2に基づいて説明する。
【0040】
以下、3段式ロケット(多段式ロケットの一例)を単に「ロケット」という。
以下、第n段(n:1以上の整数)のロケットエンジンが固体燃料を燃焼しているときに行うロケットの誘導を「n段誘導」という。
また、前段のロケットエンジンが固体燃料を燃焼し終わって切り離されてから次段のロケットエンジンが固体燃料を燃焼し始めるまでのロケットの誘導、特に、2段誘導の終了時から3段誘導の開始時までのロケットの誘導を「コースト誘導」という。
【0041】
図2に示す3段式ロケット誘導処理では2段誘導以降の処理を説明する。
図示省略する1段誘導(1段誘導の終了時から2段誘導の開始時までのコースト誘導を含む)において、多段式ロケット誘導システム100は、所定の誘導処理(例えば、従来の誘導処理)によってロケットのヨー姿勢角(方位角)を調整してロケットを目標の軌道面に誘導する。目標の軌道面は、目標の軌道(円または楕円)を含んだ平面である。
多段式ロケット誘導システム100は、図2に示す2段誘導以降の処理によってロケットのピッチ姿勢角を調整してロケットを目標の軌道に誘導する。
【0042】
多段式ロケット誘導システム100は、図2に示す3段式ロケット誘導処理を3段の燃焼が終了するまで周期的(例えば、1または2秒毎)に実行する。
つまり、多段式ロケット誘導システム100は、ロケットのピッチ姿勢角(推力方向)を周期的に正しい角度に調整する。
【0043】
S110において、予測演算部220は、現在の誘導が2段誘導とコースト誘導と3段誘導とのいずれであるかを判定する。
現在の誘導がいずれの誘導であるかを示すデータはロケットエンジンの切り離し時や固体燃料の燃焼開始時に誘導装置記憶部290に記憶されるものとする。
現在の誘導が2段誘導である場合、S120に進む。
現在の誘導がコースト誘導である場合、S130に進む。
現在の誘導が3段誘導である場合、S140に進む。
【0044】
S120において、予測演算部220は、後述する2段誘導予測演算処理によって最終段(3段)の燃焼終了時の軌道予測値(例えば、近地点高度や遠地点高度の予測値)を算出する。
S120の後、S150に進む。
【0045】
S130において、予測演算部220は、後述するコースト誘導予測演算処理によって最終段(3段)の燃焼終了時の軌道予測値を算出する。
S130の後、S150に進む。
【0046】
S140において、予測演算部220は、後述する3段誘導予測演算処理によって最終段(3段)の燃焼終了時の軌道予測値を算出する。
S140の後、S150に進む。
【0047】
S150において、誘導演算部230は、S120、S130またはS140で算出された軌道予測値と、誘導装置記憶部290に予め記憶する軌道目標値との値差を算出する。例えば、誘導演算部230は、各軌道要素の目標値と予測値との差を二乗して合計した二乗和を軌道予測値と軌道目標値との値差として算出する。
S150の後、S151に進む。
【0048】
S151において、誘導演算部230は、S150で算出した軌道予測値と軌道目標値との値差と、誘導装置記憶部290に予め記憶する誘導閾値とを比較する。
軌道予測値と軌道目標値との値差が誘導閾値未満である場合、ロケットは目標の軌道に向けて正しく誘導されているため、今回の周期の3段式ロケット誘導処理を終了する。
軌道予測値と軌道目標値との値差が誘導閾値以上である場合、S160に進む。
【0049】
S160において、誘導演算部230は、S150で算出した軌道予測値と軌道目標値との値差に基づいてロケットの新たな独立変数を算出する。
独立変数とは、例えばピッチ姿勢角、後述するステアリング係数、最終段燃焼開始時刻である。
【0050】
例えば、誘導演算部230は、以下のようにロケットの新たな独立変数を算出する。
【0051】
誘導演算部230は、以下の関係式(1)を用いて独立変数を更新する更新量を表す更新量ベクトルΔCを算出する。つまり、誘導演算部230は、感度行列Jの疑似逆行列に軌道目標値と軌道予測値との値差を表す誤差ベクトルΔyを乗じて更新量ベクトルΔCを算出する。感度行列Jは、軌道予測値を独立変数で偏微分して得られるヤコビ行列である。
【0052】
誘導演算部230は、関係式(1)を用いて算出した更新量ベクトルΔCが表す独立変数の更新量を現在の独立変数に加算して新たな独立変数を算出する。
誘導演算部230のうちS120およびS140は、新たな独立変数のうちステアリング係数を式(2)に設定し、時間変数tに現在時刻から現段燃焼終了時刻までの時間および3段燃焼開始時刻から3段燃焼終了時刻までの時間を代入して式(2)を計算する。
【0053】
式(2)は、ロケットの新たなピッチ姿勢角θのタンジェント値tanθを計算するための時間変数tの2次式である。式(2)を「2次タンジェント則」という。
【0054】
誘導演算部230は、式(2)の代わりに式(3)を用いても構わない。
式(3)は、ロケットの新たなピッチ姿勢角θのタンジェント値tanθを計算するための時間変数tの1次式である。式(3)を「リニアタンジェント則」という。
【0055】
例えば、誘導演算部230は、2段誘導時には2次タンジェント則を用い、3段誘導時にはリニアタンジェント則を用いる。
但し、誘導演算部230は、2段誘導時および3段誘導時に2次タンジェント則とリニアタンジェント則とのどちらを用いてもよい。
【0056】
【数1】
【0057】
S160の後、S110に戻り、軌道目標値と軌道予測値との値差が誘導閾値未満に収束するまでS110からS160の処理を繰り返す。
【0058】
図2に示した3段式ロケット誘導処理を3段の燃焼が終了するまで周期的に繰り返すことにより、ロケットを目標の軌道に誘導することができる。
【0059】
図3は、実施の形態1における2段誘導演算処理(S120)を示すフローチャートである。
実施の形態1における2段誘導演算処理(S120)について、図3に基づいて説明する。
【0060】
S121において、推力加速度予測部210は、航法装置110からロケットの現在の加速度ベクトル(推力加速度ベクトル)を取得し、取得した現在の加速度ベクトルに基づいて所定の更新処理によって2段推力加速度プロファイルを更新する。
【0061】
また、予測演算部220は、航法装置110からロケットの現在の位置ベクトルと速度ベクトルとを入力する。さらに、予測演算部220は、2段の固体燃料の燃焼が終了する2段燃焼終了時刻と、現在時刻から2段燃焼終了時刻までの各時刻の推力加速度とを推力加速度プロファイルから取得する。
予測演算部220は、現在の位置ベクトルと、現在の速度ベクトルと、現在時刻と、2段燃焼終了時刻と、現在時刻から2段燃焼終了時刻までの各時刻の推力加速度と、を入力にして所定の予測演算関数を演算し、2段燃焼終了時刻の位置ベクトルと速度ベクトルとを算出する。
【0062】
予測演算関数の演算において、予測演算部220は、現在時刻から2段燃焼終了時刻まで推力加速度の積分計算を行い、現在時刻から2段燃焼終了時刻までの速度ベクトルと位置ベクトルとの変位量を算出する。さらに、予測演算部220は、速度ベクトルの変位量を現在の速度ベクトルに加算して2段燃焼終了時刻の速度ベクトルを算出し、位置ベクトルの変位量を現在の位置ベクトルに加算して2段燃焼終了時刻の位置ベクトルを算出する。
S121の後、S122に進む。
【0063】
S122において、2段燃焼終了時刻から3段燃焼開始時刻までの間はいずれのロケットエンジンも稼働していないため、各時刻の推力加速度はゼロである。
予測演算部220は、2段燃焼終了時刻の位置ベクトルと、2段燃焼終了時刻の速度ベクトルと、現在時刻と、3段燃焼開始時刻と、を入力にして予測演算関数を演算する。予測演算関数の演算において、予測演算部220は、S121と同様に積分計算によって3段燃焼開始時刻の位置ベクトルと速度ベクトルとを算出する。
S122の後、S123に進む。
【0064】
S123において、予測演算部220は、3段の固体燃料の燃焼が終了する3段燃焼終了時刻と、3段燃焼開始時刻から3段燃焼終了時刻までの各時刻の推力加速度とを推力加速度プロファイルから取得する。
予測演算部220は、3段燃焼開始時刻の位置ベクトルと、3段燃焼開始時刻の速度ベクトルと、現在時刻と、3段燃焼終了時刻と、3段燃焼開始時刻から3段燃焼終了時刻までの各時刻の推力加速度と、を入力にして予測演算関数を演算する。予測演算関数の演算において、予測演算部220は、S121と同様に積分計算によって3段燃焼終了時刻の位置ベクトルと速度ベクトルとを算出する。
【0065】
さらに、予測演算部220は、例えば3段燃焼終了時刻の位置ベクトルと速度ベクトルとに基づいて軌道要素の予測値(軌道要素予測値)を算出する。
軌道要素および軌道要素予測値の算出方法については別途説明する。
S123により、2段誘導演算処理(S120)は終了する。
【0066】
図4は、実施の形態1におけるコースト誘導演算処理(S130)を示すフローチャートである。
実施の形態1におけるコースト誘導演算処理(S130)について、図4に基づいて説明する。
【0067】
S131において、予測演算部220は、航法装置110からロケットの現在の位置ベクトルと速度ベクトルとを入力する。現在時刻から3段燃焼開始時刻までの間はいずれのロケットエンジンも稼働していないため、各時刻の推力加速度はゼロである。
予測演算部220は、現在の位置ベクトルと、現在の速度ベクトルと、現在時刻と、3段燃焼開始時刻と、を入力にして予測演算関数を演算する。予測演算関数の演算において、予測演算部220は、図3のS121と同様に積分計算によって3段燃焼開始時刻の位置ベクトルと速度ベクトルとを算出する。
S131の後、S132に進む。
【0068】
S132において、予測演算部220は、3段の固体燃料の燃焼が終了する3段燃焼終了時刻と、3段燃焼開始時刻から3段燃焼終了時刻までの各時刻の推力加速度とを推力加速度プロファイルから取得する。
予測演算部220は、3段燃焼開始時刻の位置ベクトルと、3段燃焼開始時刻の速度ベクトルと、現在時刻と、3段燃焼終了時刻と、3段燃焼開始時刻から3段燃焼終了時刻までの各時刻の推力加速度と、を入力にして予測演算関数を演算する。予測演算関数の演算において、予測演算部220は、図3のS121と同様に積分計算によって3段燃焼終了時刻の位置ベクトルと速度ベクトルとを算出する。
【0069】
さらに、予測演算部220は、例えば3段燃焼終了時刻の位置ベクトルと速度ベクトルとに基づいて軌道要素予測値を算出する。
軌道要素予測値の算出方法については別途説明する。
S132により、コースト誘導演算処理(S130)は終了する。
【0070】
図5は、実施の形態1における3段誘導演算処理(S140)を示すフローチャートである。
実施の形態1における3段誘導演算処理(S140)について、図5に基づいて説明する。
【0071】
S141において、推力加速度予測部210は、航法装置110からロケットの現在の加速度ベクトル(推力加速度ベクトル)を取得し、取得した現在の加速度ベクトルに基づいて所定の更新処理によって3段推力加速度プロファイルを更新する。
【0072】
また、予測演算部220は、航法装置110からロケットの現在の位置ベクトルと速度ベクトルとを入力する。さらに、予測演算部220は、3段の固体燃料の燃焼が終了する3段燃焼終了時刻と、現在時刻から3段燃焼終了時刻までの各時刻の推力加速度とを推力加速度プロファイルから取得する。
予測演算部220は、現在の位置ベクトルと、現在の速度ベクトルと、現在時刻と、3段燃焼終了時刻と、現在時刻から3段燃焼終了時刻までの各時刻の推力加速度と、を入力にして予測演算関数を演算する。予測演算関数の演算において、予測演算部220は、図3のS121と同様に積分計算によって3段燃焼終了時刻の位置ベクトルと速度ベクトルとを算出する。
【0073】
さらに、予測演算部220は、例えば3段燃焼終了時刻の位置ベクトルと速度ベクトルとに基づいて軌道要素予測値を算出する。
軌道要素予測値の算出方法については別途説明する。
S141により、3段誘導演算処理(S140)は終了する。
【0074】
図6、図7は、実施の形態1における軌道要素の説明図である。
実施の形態1における軌道要素について、図6、図7に基づいて説明する。
【0075】
軌道要素は、軌道の大きさを表す項目である。
軌道要素として、近地点高度、遠地点高度、軌道長半径、軌道傾斜角、近地点引数、真近点離角、などが挙げられる。これらの軌道要素について以下に説明する。
ロケット誘導装置200は例えば1つまたは複数の軌道要素を用いる。
【0076】
目標軌道は、地球の重心を焦点とする楕円軌道(または円軌道)である。目標軌道内でのロケットの進行方向を矢印で記す。
近地点は目標軌道内で地球重心から最も近い点であり、地球重心から近地点までの距離を近地点半径という。「近地点高度rp」は近地点半径から地球の赤道半径を引いた距離である。
遠地点は目標軌道内で地球重心から最も遠い点であり、地球重心から遠地点までの距離を遠地点半径という。「遠地点高度ra」は遠地点半径から地球の赤道半径を引いた距離である。
【0077】
「軌道長半径a」は目標軌道の中心oから遠地点までの距離である。
「軌道傾斜角i」は目標軌道と地球の赤道面とが成す角度である。
【0078】
昇交点は目標軌道と地球の赤道面とが交わる点(地球の南半球から北半球への通過点)である。
「近地点引数ω」は昇交点から近地点までの角度(ロケットの進行方向側の角度)である。
【0079】
「真近点離角f」は近地点からロケットの位置までの角度(ロケットの進行方向側の角度)である。
【0080】
また、目標軌道の中心oから地球重心までの距離aeの軌道長半径aに対する比率を離心率eといい、昇交点からロケットの位置までの角度(ロケットの進行方向側の角度)を緯度引数lという。
【0081】
以下に、位置ベクトルrと速度ベクトルvとに基づいて各軌道要素の予測値(軌道要素予測値)を算出する算出式を以下に示す。
【0082】
【数2】
【0083】
【数3】
【0084】
図8は、実施の形態1における多段式ロケット誘導システム100で用いる座標系の一例を示す図である。
図8に示すように、例えば、地球中心(または地球重心)を座標系の「原点o」とし、原点oからグリニッジ子午線と赤道との交点を通る方向を「X軸方向」とし、北極方向(北方向)を「Z軸方向」とし、Z軸とX軸とに直交し右手系を成す方向を「Y軸方向」とする。
【0085】
図9は、実施の形態1におけるロケットのピッチ姿勢角θを定義する図である。
図9に示すように、ロケットのピッチ角θは接線方向と角運動量方向とを含んだ平面に対して推力方向が成す角度である。ロケットのピッチ姿勢角θが表す方向は、ロケットの推力方向とみなすことができる。
接線方向は「(位置ベクトル×速度ベクトル)×位置ベクトル」(「×」は外積を表す)で定義される方向である。
軌道半径方向は位置ベクトルの向きに相当する方向である。
角運動量方向は接線方向と軌道半径方向とに対して垂直な方向であり、「位置ベクトル×速度ベクトル」(「×」は外積を表す)で定義される。
【0086】
次に、図2から図4で説明した多段式ロケットの誘導アルゴリズムをシミュレーションした結果について説明する。
【0087】
図10は、実施の形態1における2段誘導をシミュレーションした際のパラメータを示す表である。
図11は、実施の形態1におけるコースト誘導をシミュレーションした際のパラメータを示す表である。
図12は、実施の形態1における3段誘導をシミュレーションした際のパラメータを示す表である。
図13は、実施の形態1におけるシミュレーションパターンを示す表である。
図14は、実施の形態1における誘導アルゴリズムのシミュレーション結果(円軌道)を示すグラフである。
図15は、実施の形態1における誘導アルゴリズムのシミュレーション結果(楕円軌道)を示すグラフである。
【0088】
図10から図12においてシミュレーションで使用したパラメータを「○」で記す。
図10から図15に示す各記号の意味は以下の通りである。
「A」は実施の形態1における誘導アルゴリズム(中間目標値を設定せずに全段を統合したロジック)を意味する。
「B」は従来の誘導アルゴリズム(各段毎に中間目標値を設定するロジック)を意味する。
「Q」は2次タンジェント則を意味する。
「L」はリニアタンジェント則を意味する。
「CX」はステアリング係数を意味する。
「θ」は3段燃焼中のロケットのピッチ姿勢角を示す。
「T」は図10においては2段燃焼終了時刻から3段燃焼開始時刻までの時間を示し、図11においては現在時刻から3段燃焼開始時刻までの時間を示す。
「rp」は近地点高度を示す。
「ra」は遠地点高度を示す。
「f」は真近点離角を示す。
【0089】
図10において、Aの従属変数(rp,ra,f)は3段燃焼終了時刻の値であり、Bの従属変数は2段燃焼終了時刻の値である。また、真近点離角fは楕円軌道のシミュレーションでは含め、円軌道のシミュレーションでは含めない。
図11において、近地点高度rpと遠地点高度raとは3段燃焼終了時刻の値であり、真近点離角fは3段燃焼開始時刻の値である。
図12において、従属変数(rp,ra)は3段燃焼終了時刻の値である。
【0090】
図13に示す6パターンのシミュレーション結果のRSS(Root Summed Square)値を図14、15に示す。
図14は、目標の円軌道(500×500キロメートル)に対する近地点高度、遠地点高度および軌道長半径の誤差(単位:キロメートル)を示している。
図15は、目標の円軌道(500×250キロメートル)に対する近地点高度、遠地点高度および軌道長半径の誤差(単位:キロメートル)を示している。
【0091】
図14、図15に示すように、実施の形態1における誘導アルゴリズム「A」と2次タンジェント則「2次」との組み合わせが最も誤差が小さく、ロケットを正確に目標軌道に誘導することができる。
実施の形態1における誘導アルゴリズム「A」とリニアタンジェント則「リニア」との組み合わせで誤差が大きいケースがあるが、これは、この組み合せでは、誘導アルゴリズム「A」と2次タンジェント則「2次」との組み合わせに比べてロバスト性が落ちるため、精度が悪くなったケースがあったためである。
【0092】
図16は、実施の形態1におけるロケット誘導装置200のハードウェア資源の一例を示す図である。
図16において、ロケット誘導装置200は、CPU911(Central Processing Unit)を備えている。CPU911は、バス912を介してROM913、RAM914、通信ボード915と接続され、これらのハードウェアデバイスを制御する。通信ボード915は、有線または無線でネットワークに接続している。
【0093】
ROMまたはRAMには、OS(オペレーティングシステム)、プログラム群、ファイル群が記憶されている。
【0094】
プログラム群には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラム(例えば、多段式ロケット誘導プログラム)は、CPU911により読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0095】
ファイル群には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0096】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
フローチャートなどに基づいて説明する実施の形態の処理はCPU911やその他のハードウェアを用いて実行される。
【0097】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0098】
実施の形態1において、多段式ロケットを目標軌道に誘導するシステムについて説明した。
実施の形態1により、固体燃料を用いる多段式ロケットを中間の目標地点を経由せずに高い精度で目標軌道に誘導することができる。また、固体燃料を用いることにより発射整備作業の時間を短縮し、中間の目標地点を設定しないことによりミッション解析期間を短縮することができる。
つまり、実施の形態1により、緊急の打ち上げ要請にもタイムリーに応えられるという即応性を有した上で、多段式ロケットを目標軌道に高い精度で誘導することができる。
【0099】
実施の形態1では3段式ロケットを例に挙げて説明したが、2段式ロケットまたは4段以上の多段式ロケットを誘導しても構わない。誘導方法は3段式ロケットと同様である。
実施の形態1では2段誘導以降でロケットのピッチ姿勢角(推力方向)を調整するアルゴリズムを例に挙げて説明したが、1段誘導時や1段誘導の終了時から2段誘導の開始時までのコースト誘導時においてもロケットのピッチ姿勢角を調整しても構わない。調整方法は2段誘導時や2段誘導の終了時から3段誘導の開始時までのコースト誘導時と同様である。
【符号の説明】
【0100】
100 多段式ロケット誘導システム、110 航法装置、120 ロケット制御装置、200 ロケット誘導装置、210 推力加速度予測部、220 予測演算部、230 誘導演算部、290 誘導装置記憶部、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード。
【特許請求の範囲】
【請求項1】
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する多段式ロケット誘導装置において、
前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する誘導演算部と
を備えることを特徴とする多段式ロケット誘導装置。
【請求項2】
前記予測演算部は、
前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、次段のロケットエンジンが固体燃料を燃焼し始める予定時刻として予め記憶する次段燃焼開始時刻と、に基づいて前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルと、前記次段燃焼終了時刻と、前記最終段燃焼終了時刻と、前記次段燃焼終了時刻までの推力加速度の予測値を示す次段推力加速度プロファイルと、前記最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する
ことを特徴とする請求項1記載の多段式ロケット誘導装置。
【請求項3】
前記予測演算部は、
前記ロケット制御装置が前記多段式ロケットの推力方向の角度を前記新たな推力方向の角度に変更した後、前記航法装置から新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルとを入力し、前記新たな現在の位置ベクトルと前記新たな現在の速度ベクトルと新たな現在時刻と前記現段燃焼終了時刻と現段推力加速度プロファイルとを用いて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを新たに算出する
ことを特徴とする請求項1または請求項2記載の多段式ロケット誘導装置。
【請求項4】
前記予測演算部は、前記最終段燃焼終了時刻の軌道の予測値を算出し、
前記誘導演算部は、予測値と目標値との差に基づいて、前記多段式ロケットの新たな推力方向の角度を算出する
ことを特徴とする請求項1から請求項3いずれかに記載の多段式ロケット誘導装置。
【請求項5】
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する多段式ロケット誘導装置を機能させる多段式ロケット誘導プログラムであって、
前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルとに基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルとに基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する誘導演算部として前記多段式ロケット誘導装置を機能させる
ことを特徴とする多段式ロケット誘導プログラム。
【請求項6】
前記予測演算部は、
前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、次段のロケットエンジンが固体燃料を燃焼し始める予定時刻として予め記憶する次段燃焼開始時刻と、に基づいて前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルと、前記次段燃焼終了時刻と、前記最終段燃焼終了時刻と、前記次段燃焼終了時刻までの推力加速度の予測値を示す次段推力加速度プロファイルと、前記最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する
ことを特徴とする請求項5記載の多段式ロケット誘導プログラム。
【請求項7】
前記予測演算部は、
前記ロケット制御装置が前記多段式ロケットの推力方向の角度を前記新たな推力方向の角度に変更した後、前記航法装置から新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルとを入力し、前記新たな現在の位置ベクトルと前記新たな現在の速度ベクトルと新たな現在時刻と前記現段燃焼終了時刻と前記現段推力加速度プロファイルとを用いて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを新たに算出する
ことを特徴とする請求項5または請求項6記載の多段式ロケット誘導プログラム。
【請求項8】
前記予測演算部は、前記最終段燃焼終了時刻の軌道の予測値を算出し、
前記誘導演算部は、予測値との目標値との差に基づいて、前記多段式ロケットの新たな推力方向の角度を算出する
ことを特徴とする請求項5から請求項7いずれかに記載の多段式ロケット誘導プログラム。
【請求項9】
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する多段式ロケット誘導装置によって実行する多段式ロケット誘導方法において、
予測演算部が、前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルとに基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルとに基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出し、
誘導演算部が、前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する
ことを特徴とする多段式ロケット誘導方法。
【請求項10】
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置と、
前記多段式ロケットの推力方向を制御するロケット制御装置と、
前記多段式ロケットを誘導する多段式ロケット誘導装置と、を備える多段式ロケット誘導システムにおいて、
前記多段式ロケット誘導装置は、
前記航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルとに基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルとに基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記ロケット制御装置に出力する誘導演算部とを備えることを特徴とする多段式ロケット誘導システム。
【請求項1】
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する多段式ロケット誘導装置において、
前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルと、に基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する誘導演算部と
を備えることを特徴とする多段式ロケット誘導装置。
【請求項2】
前記予測演算部は、
前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、次段のロケットエンジンが固体燃料を燃焼し始める予定時刻として予め記憶する次段燃焼開始時刻と、に基づいて前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルと、前記次段燃焼終了時刻と、前記最終段燃焼終了時刻と、前記次段燃焼終了時刻までの推力加速度の予測値を示す次段推力加速度プロファイルと、前記最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する
ことを特徴とする請求項1記載の多段式ロケット誘導装置。
【請求項3】
前記予測演算部は、
前記ロケット制御装置が前記多段式ロケットの推力方向の角度を前記新たな推力方向の角度に変更した後、前記航法装置から新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルとを入力し、前記新たな現在の位置ベクトルと前記新たな現在の速度ベクトルと新たな現在時刻と前記現段燃焼終了時刻と現段推力加速度プロファイルとを用いて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを新たに算出する
ことを特徴とする請求項1または請求項2記載の多段式ロケット誘導装置。
【請求項4】
前記予測演算部は、前記最終段燃焼終了時刻の軌道の予測値を算出し、
前記誘導演算部は、予測値と目標値との差に基づいて、前記多段式ロケットの新たな推力方向の角度を算出する
ことを特徴とする請求項1から請求項3いずれかに記載の多段式ロケット誘導装置。
【請求項5】
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する多段式ロケット誘導装置を機能させる多段式ロケット誘導プログラムであって、
前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルとに基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルとに基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する誘導演算部として前記多段式ロケット誘導装置を機能させる
ことを特徴とする多段式ロケット誘導プログラム。
【請求項6】
前記予測演算部は、
前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、次段のロケットエンジンが固体燃料を燃焼し始める予定時刻として予め記憶する次段燃焼開始時刻と、に基づいて前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記次段燃焼開始時刻の予測位置ベクトルと予測速度ベクトルと、前記次段燃焼終了時刻と、前記最終段燃焼終了時刻と、前記次段燃焼終了時刻までの推力加速度の予測値を示す次段推力加速度プロファイルと、前記最終段推力加速度プロファイルと、に基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する
ことを特徴とする請求項5記載の多段式ロケット誘導プログラム。
【請求項7】
前記予測演算部は、
前記ロケット制御装置が前記多段式ロケットの推力方向の角度を前記新たな推力方向の角度に変更した後、前記航法装置から新たな現在の位置ベクトルと新たな現在の速度ベクトルと新たな現在の推力加速度ベクトルとを入力し、前記新たな現在の位置ベクトルと前記新たな現在の速度ベクトルと新たな現在時刻と前記現段燃焼終了時刻と前記現段推力加速度プロファイルとを用いて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを新たに算出する
ことを特徴とする請求項5または請求項6記載の多段式ロケット誘導プログラム。
【請求項8】
前記予測演算部は、前記最終段燃焼終了時刻の軌道の予測値を算出し、
前記誘導演算部は、予測値との目標値との差に基づいて、前記多段式ロケットの新たな推力方向の角度を算出する
ことを特徴とする請求項5から請求項7いずれかに記載の多段式ロケット誘導プログラム。
【請求項9】
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットを誘導する多段式ロケット誘導装置によって実行する多段式ロケット誘導方法において、
予測演算部が、前記多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルとに基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルとに基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出し、
誘導演算部が、前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記多段式ロケットの推力方向を制御するロケット制御装置に出力する
ことを特徴とする多段式ロケット誘導方法。
【請求項10】
固体燃料を燃焼して推力を得るロケットエンジンを複数段搭載した多段式ロケットの位置ベクトルと速度ベクトルと推力加速度ベクトルとを計測する航法装置と、
前記多段式ロケットの推力方向を制御するロケット制御装置と、
前記多段式ロケットを誘導する多段式ロケット誘導装置と、を備える多段式ロケット誘導システムにおいて、
前記多段式ロケット誘導装置は、
前記航法装置から現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルとを入力し、入力した現在の位置ベクトルと現在の速度ベクトルと現在の推力加速度ベクトルと、現在時刻と、推力を得ている現段のロケットエンジンが現段の固体燃料を燃焼し終わる予定時刻として予め記憶する現段燃焼終了時刻と、前記現段燃焼終了時刻までの推力加速度の予測値を示す現段推力加速度プロファイルとに基づいて前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルとを積分計算によって算出し、算出した前記現段燃焼終了時刻の予測位置ベクトルと予測速度ベクトルと、前記現段燃焼終了時刻と、最終段のロケットエンジンが最終段の固体燃料を燃焼し終わる予定時刻として予め記憶する最終段燃焼終了時刻と、前記最終段燃焼終了時刻までの推力加速度の予測値を示す最終段推力加速度プロファイルとに基づいて前記最終段燃焼終了時刻の軌道の予測値を積分計算によって算出する予測演算部と、
前記予測演算部によって算出された前記最終段燃焼終了時刻の軌道の予測値と所定の軌道の目標値とを比較し、前記最終段燃焼終了時刻の軌道の予測値と前記所定の軌道の目標値との差に基づいて前記多段式ロケットの新たな推力方向の角度を算出し、算出した前記多段式ロケットの新たな推力方向の角度を前記ロケット制御装置に出力する誘導演算部とを備えることを特徴とする多段式ロケット誘導システム。
【図1】

【図2】

【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−107584(P2013−107584A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−256242(P2011−256242)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(591102095)三菱スペース・ソフトウエア株式会社 (148)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(591102095)三菱スペース・ソフトウエア株式会社 (148)
[ Back to top ]