
平行回転翼を利用した流体機械
【課題】鳥の羽ばたき運動をピッチング回転翼に置換えた飛行機の提供。
【解決手段】鳥の羽ばたき工程を複数の要素翼に置き換え、左右軸の周りに回転する円筒の稜線上に配置した。その際、各要素翼は、歯車機構により、公転しながら同じ角度自転して戻され、基本的に平行回転する。さらに、各要素翼は周期的な遥動を加えられて、失速を防きながら揚力と推力を発生する。この原理の最大のネックは回転翼によって惹起されるピッチング回転の制御の難しさであった。その解決策として、回転翼の中央に、前後に貫流する空気流を偏向させる静止翼を設けた。回転翼の駆動反力は水平尾翼の外側にもうけた外側翼によってバランスを取らせた。最近の著しく進歩した制御技術を用いれば、敢えてやや複雑なままに鳥を模擬したこの飛行機は、鳥の持つ様々な飛行を可能にする。
【解決手段】鳥の羽ばたき工程を複数の要素翼に置き換え、左右軸の周りに回転する円筒の稜線上に配置した。その際、各要素翼は、歯車機構により、公転しながら同じ角度自転して戻され、基本的に平行回転する。さらに、各要素翼は周期的な遥動を加えられて、失速を防きながら揚力と推力を発生する。この原理の最大のネックは回転翼によって惹起されるピッチング回転の制御の難しさであった。その解決策として、回転翼の中央に、前後に貫流する空気流を偏向させる静止翼を設けた。回転翼の駆動反力は水平尾翼の外側にもうけた外側翼によってバランスを取らせた。最近の著しく進歩した制御技術を用いれば、敢えてやや複雑なままに鳥を模擬したこの飛行機は、鳥の持つ様々な飛行を可能にする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、平行回転翼を利用した流体機械に関するものである。
【背景技術】
【0002】
人類は、鳥の飛行術の研究から舞い上がりを得意とするヘリコプターと滑空を得意とする飛行機を実用化してきたが、鳥のように舞い上がり、そのまま滑空に移れる飛行機はまだ実用化されていない。
【0003】
鳥類と哺乳類は共に爬虫類から進化したため骨格が良く似ているが、鳥類は省ける機能を徹底的に退化させながら飛ぶための機能を高度に、且つ、多様に進化させてきた。
【0004】
実際、鳥の持つ機構には飛ぶために進化させたと思われる哺乳類との違いが多く見られる。特に、羽根でできた翼を羽ばたく機構は自然が作り出した最高傑作の一つであるが、かなり複雑である。従って、鳥をあるがままに模擬してゆくと、その飛行機は限りなく複雑な機構になってしまう。
【0005】
一方、人類は哺乳類を模擬して自動車を実用化してきたが、手に負えない程の複雑さにはなっていない。従って、同じように爬虫類から進化した鳥を模擬した飛行機が、自動車と比較できないほど複雑な機械になってしまうとも考えにくい。
【0006】
やや複雑になっても構わないから、鳥の羽ばたき機構をもう少し忠実に模擬できないであろうか。ライト兄弟の発明から100年以上経過し、コンピューターが目覚しい発達を遂げ、流体力学が十分に実用的に利用できる現代に立って、将来を展望すれば、その試みは、無謀とは思われない。
【0007】
ヘリコプターは上下軸の周りに複数の翼を回転させているが、この方式は鳥には見られない。しかし、複数の翼を左右軸の周りにほぼ平行を保ったまま回転させる方式は鳥の羽ばたき運動を近似的に模擬できている。
【0008】
以下、上下に羽ばたく翼の動きを、近似的に平行回転する円運動に置き換え、工程を複数に分解して円周上に配置し、同時に回転させる回転翼の方式を、本特許願いでは、平行回転翼、ピッチング回転翼、平行ピッチング回転翼、または、単に回転翼と呼ぶ。
【0009】
平行回転翼の原理は、特許文献2に示すように、既に、34年前の1975年に、フランスで特許出願されている。平行回転、遥動付加、偏心-遥動変換、偏心リング割出しの4つの機構を組み合わせて、複数の要素翼を周期的な遥動を加えながら平行回転させるアイデアは本発明と同じであったが、実用化検討は十分でなく、原理の提案に留まっていた。
【0010】
1991年には、このアイデアの回転翼を用いた飛行機の特許が、特許文献3に示すように、同じくフランス人によって日本に外国出願されている。この飛行機は実際に試作されたが、機体のピッチング回転がコントロールできず、試験飛行に失敗したと聞いている。
【0011】
平行回転翼の原理は、潮流発電機/送水機、風力発電機/送風機、水中回転翼船、水上回転翼船、水面滑空機、飛行機など、様々な流体機械に応用できるが、その中で技術的に最も困難な応用分野は飛行機であろう。そこで、本発明活動では、困難な技術課題を早めに見つけ出すために、応用目標を飛行機に設定した。従って、以下の記述は、飛行機への応用の形をとって進める。
【0012】
また、図面視野としては、左側面図を基本とする。回転する要素翼の回転翼上の角度位置については上向き垂直線をゼロとし、前下げ回転方向を正に定義する。また、要素翼の迎角については、流入気流に向う線をゼロとし、翼弦が右回転方向に傾斜する角度を正と定義する。左側面図と要素翼の回転翼上の角度位置と迎角の定義を図30に示す。
【0013】
特許文献1の発明は、2007年に出願されているが、連続している羽ばたき運動の工程を複数の要素翼の状態に分散し、それらを円筒面の稜線上に配置し、基本的に平行回転させながら、それぞれの要素翼の迎角を周期的に遥動させて、鳥の羽ばたき機構をやや複雑なままに、近似的に模擬している。
【0014】
そして、いくつかの飛行条件においては、要素翼に、負の迎角や過大な迎角が生じることを示し、その処理方法について原理的な解決策を提案していた。しかし、この発明を利用するためには、更に、実用化のための課題を明らかにし、解決策を見出す必要があった。
【0015】
渡り鳥の水平飛行では、鳥は翼面と流入気流との交角である迎角を制御しながら翼を上下に動かすことにより、飛行に必要な空気力を得ている。運動工程としては、推力と揚力を同時に発生しながら翼を下死点に向かって打ち下ろす工程と、揚力低下を防ぎながら翼を上死点に跳ね上げる工程が繰り返えされている。羽ばたき飛行中の翼に入る空気の流入角の変化を説明する模式図を、図50、図51、図52に示す。
【0016】
この時、翼の外側の部分(以下、「手の部分」と呼ぶ)では主に推力を、内側の部分(以下、「腕の部分」と呼ぶ)では主に揚力を発生している。従って、羽ばたき運動の模擬には、一つの翼の中で手と腕をどのように動かして揚力と推力を発生しているかの理解が必要となる。翼の構成と骨格の模式図を、図49に示す。
【0017】
また、特許文献1では、機体のピッチング回転モーメントをゼロにする方法として、回転翼の前後位置を機体重心に対して移動させるアイデアが提案されていた。しかし、この方法は、多くの鳥に用いられているとは言え、機械にした場合は大きな質量を迅速に移動させることが必要になるため、制御技術上大きな困難が予想された。そこで、これに代わる回転モーメントの相殺方法の発明が必要となった。
【0018】
平行回転翼を用いた飛行機では、円筒面の稜線上に配置された複数の要素翼に発生する空気力の総和として、回転翼の中心軸に、揚力、推力、回転モーメントの3つが発生するが、これらは相互に密接に関係しているので、調整を取りながら制御する必要がある。
【0019】
水平飛行時には、揚力に対しては取付け角が、推力に対しては遥動角がそれぞれ主導的な制御ファクターであるが、回転モーメントについては、特許文献1の中では、主導的な制御ファクターは明らかにされていなかった。
【0020】
特許文献1の回転翼は、歯車とローラーを用いたやや複雑な機構となっているが、その実用化のためには、レイアウトを見直し、要素翼の剛性とその両端の結合剛性を高め、要素翼の本数を増加し、最大遥動角を拡大し、オイル潤滑を可能にする必要があった。
【0021】
特に、4節リンク機構を用いて回転に同期した揺動回転を付加する機構における、偏心リングとローラーの接触面の倒れの防止と潤滑の方法は、重要な検討課題であった。
【0022】
一方、飛行機としては、従来の飛行機に倣って水平尾翼と垂直尾翼を備え、主翼を回転翼に代えていたが、飛行時の静安定性についての検討は十分ではなかった。
【0023】
そこで、回転翼に発生する回転モーメントと機体のピッチング回転との関係を踏まえて、機体のピッチング回転に対する静安定性を確保する方法について再確認する必要があった。
【0024】
鳥は色々な飛行モードを選び、飛行しているが、鳥の直線飛行メカニズムを模擬するために、離陸準備から、離陸、加速上昇、水平飛行、滑空、減速降下、着地、停止にいたる種々の飛行モードについて、動作を観察し、理解する必要があった。
【0025】
タカは空中で獲物を捕まえられる強い足を持っており、地上でも確りと踏ん張れる。木の枝から飛び出す時には、枝を足で確り握っておき、大きく翼を立てて跳ね上げて、翼の上面で空気を後方に煽り出して、前方から補給される空気の流れに乗って翼を前に出しながら打ち下し、枝を蹴って前方に飛び出し、その後、強く羽ばたいて加速する。
【0026】
アオサギは、翼を水平に広げたまま、長い足を折って斜め前上方にジャンプして飛び出し、直ぐに翼を打ち下して、水平を保ちながら、ハタハタと羽ばたいて加速する。
【0027】
ハクチョウは助走しながら離水する。揚力は飛行速度の2乗に比例するが、水掻きで水面を蹴って助走して加速し、離水に必要な速度を得ている。
【0028】
キジは草むらの中から突然に羽ばたきながら走り出し、助走して舞い上がる。
【0029】
また、コウノトリは、舞い上がる時に、足を踏ん張り、翼を大きく後に傾けたまま跳ね上げて後方向に気流を起こし、次に、その翼を前に回して、前方から補給される気流に乗るように前方に動かしながらジャンプし、続けて翼を打ち下して、離陸に必要な揚力と推力を発生しているように見える。離陸の瞬間には大きな回転モーメントを発生しているが、地上に足をつけている間は、踏ん張って、その回転モーメントに耐えていると推察される。
【0030】
アオサギは、水平羽ばたき飛行中に翼の傾斜角を大きく変化させているようには見えない。しかし、図53に示すように、跳ね上げ工程では、手の部分の風切り羽根を弾性的に捻り、羽根と羽根の隙間を広げて空気を逃がして、実際の翼の迎角は大きく変化させているものと思われる。
【0031】
ナベヅルの水平飛行を観察すると、図54に示すように、跳ね上げ工程では、翼を上凸に折って、下向きの空気抵抗を減らしている。
【0032】
タカは、目的によって、速い羽ばたき、強い羽ばたき、滑空などの飛行モードを臨機応変に選んでいる。さすがは空の王者である。足に重い獲物を鷲掴みにして飛行するときは、翼を一段と大きく捻って羽ばたいている。回転翼を用いた飛行機でも、積載重量や積載位置が変化するときは、空気力、回転モーメント、慣性力、慣性モーメント、重力、機体の空気抵抗などの関係を調節して、ピッチング回転モーメントのバランスをとって飛行姿勢を保つ必要がある。
【0033】
トンビは、獲物搬送の時は大きく翼を捻って一段と大きく羽ばたいているが、毎分の羽ばたき回数は変えていないように見える。
【0034】
ハトは、突風に煽られたり、急制動を掛けたり、天敵の攻撃をかわすために急降下するときなどには、翼を前後に移動させて、重心と揚力中心の距離を変えて姿勢角を大きく崩している。このような挙動では、飛行機であれば乗員は乗っていられない。しかし、事故時の安定性と安全性の設計には十分に参考にすべき現象であろう。
【0035】
タカは、目標までの距離を読んでと気流と高度と速度を選びながら、翼を止めたまま滑空して着地点を目指す。
【0036】
トンビは上昇気流を見つけて旋回上昇し、得られた位置エネルギーを速度に変換して滑空しながら次の上昇気流のある位置に移動する。それを繰り返して、殆ど羽ばたきせずに大空を渡ってゆく。
【0037】
カラスは、電柱に止まる時には、少し下からアプローチし、直前で翼を前に移動して体を起こし飛行方向を上向きにして速度エネルギーを位置エネルギーに変換して、狙ったポイントに速度をゼロにして止まる。
【0038】
ハクチョウは、着水の際には水掻きを水上スキーにして体重を支えながらブレーキをかけて停止する。その際、翼を立てて制動パラシュートにして大きな抗力を発生し、体が前に倒れるのを防いでいる。水が空気に比べて1000倍の密度をもつので、小さな水掻きでも、体を浮かせ急制動がかけられる。
【0039】
ライト兄弟は、グライダーを用いて、空気力、静安定性、操縦性などの実験を先行させ、追いかけて、別途開発していたエンジンを搭載し、飛行機を試作し、初飛行に漕ぎ着けた。
【0040】
回転翼を応用した飛行機の実用化も同じような経緯をたどると思われる。先ずは、静止翼のグライダーからはじめて、フリー回転翼のグライダー、モーター駆動の回転翼飛行機、ラジコン制御の電動回転翼飛行機へと検証項目を追加しながら試作を重ね、滑空、水平飛行、離陸、着陸などの飛行能力を開発していくことになろう。その間には、多くのシミュレーション、設計、試作、実験を積み重ねることになろう。
【0041】
鳥は、生活環境に合わせてそれぞれに最適な特性を持つように、様々な種を多様に進化させてきた。それを思うと、鳥の羽ばたき機構を模擬する飛行機の開発においても、模型試作の段階では汎用性のある飛行機を目指すが、実機試作の段階では、それぞれに特徴を持った個別最適設計の飛行機の開発に方針を切り替えるのが成功への早道になると考える。
【0042】
しかし、そのためには、様々な個別最適設計に利用できる、ユニバーサルでフレキシブルなシミュレーションプログラムの開発が必要となろう。
【0043】
飛行機のコンピューター制御技術は、既に、十分に発達している。しかし、それを利用するためには、飛行状態を司る回転翼の制御ファクターを明らかにし、それらを機体の制御ファクターと、更に、飛行機の操縦ファクターと関係付けていく必要がある。
【0044】
特許文献1の発明では、偏心リングにより与えられた偏心量を遥動回転に変換して要素翼の迎角を周期的に変えている。しかし、これだけでは、打ち下し工程の傾斜角と跳ね上げ工程の傾斜角を、大きさが等しく方向が反対にするところまでしか制御できない。
【0045】
また、回転翼の後方の要素翼は、前方の要素翼が作る後流れの影響を受けるため、遥動角をゼロにしておいても、前方の要素翼と同じ迎角をとって同じ揚力を発生することはできず、回転翼に回転モーメントを発生させてしまう。この現象は実際の鳥にはなく、回転翼にして、打ち下し工程と跳ね上げ工程を前後にずらせたことによって発生しているので、何らかの方法により技術的に解決しなければならない。従って、特許文献1の複数の要素翼のみからなる回転翼では、大きな水平尾翼をつけないと回転翼に生ずる回転モーメントを相殺して静安定性を確保することは困難であり、渡り鳥のような小さめの水平尾翼ではピッチング回転のバランスをとって飛行することはできない。
【0046】
鳥は、腕の部分と手の部分とでは羽ばたき速度に違いが生じ、捻らなくても迎角が変わる。また、肩の関節や手首の関節で捻りを加えることもできる。鳥は、これらの作用を利用して、跳ね上げ工程と打ち下し工程で、それぞれに腕と手の部分の傾斜角を最適化な迎角となるように調節し、過大な回転モーメントの発生を防止しながら必要な揚力と推力を確保していると思われる。図50〜図52に、羽ばたきと回転翼の間の流入気流ベクトルの違いを模式的に示す。
【0047】
以上を踏まえると、色々な飛行モードに切り換えて鳥のように飛行するためには、一部に、鳥には無い新しい工夫も加える必要がある。鳥の持つ飛行の仕掛けを完全に模擬することはできないが、少し複雑になっても、鳥の主要な飛行モードをカバーできるところまでは模擬する必要がある。そこまで進められれば、次の実用化段階では、個別の応用形態に合わせて、鳥に習って不要な機能は退化させ、必要な機能もできるだけ簡素化し、特別に必要な機能を付加または進化させて、多様な鳥ロボットの開発への道が開かれると展望する。
【先行技術文献】
【特許文献】
【0048】
【特許文献1】特開2009−23417 公報
【特許文献2】仏国特許出願公開第2309401号明細書
【特許文献3】特開平3−57796 公報
【発明の概要】
【発明が解決しようとする課題】
【0049】
上記の背景を踏まえて、特許文献1の発明をベースにして、回転翼の飛行機への応用をリードケースにして鳥の羽ばたき機構の実用的な模擬方法を見つけ出し、必須な機能を見極め、機構や構造を設計するための課題を明らかにした。
【0050】
特許文献1の発明では、鳥の羽ばたき運動を、周期的に遥動しながら基本的に平行回転する複数の要素翼の運動に置き換え、平行回転、遥動付加、偏心-遥動変換、偏心リング割出しの4つの機構の組み合わせによって模擬している。
【0051】
回転翼に発生する空気力の大きさは回転速度の2乗に比例するため、必要な回転速度を確保しなければならないが、回転速度の上限は回転体の1次固有振動数で決まるため、軽量で高い要素翼剛性と高い結合剛性を持った要素翼ケージ構造として実用的な回転速度を有する回転翼の構造にする必要があった。
【0052】
また、回転翼に発生する空気力を効率よく発生させるためには、要素翼の本数を増やして細くし、要素翼のアスペクト比を大きくするために、より多くの要素翼を駆動できる、コンパクトで実用的な回転翼の機構にする必要があった。
【0053】
また、内部機構の運転の信頼性を確保しながら回転翼を高速で回転するために、偏心リングとローラーとの接触部分や遊星歯車機構を含む歯車列のオイル潤滑を可能にする実用的な回転翼の構造を提供する必要があった。
【0054】
文献1の発明では、いくつかの運転条件において、回転翼の中心周りに大きな回転モーメントが発生することが予測されていたが、それを打ち消す方法として、回転翼の位置を機体重心に対して前後に移動させるアイデアが提案されていた。しかし、翼の前後移動は鳥が用いている常套手段ではあるが、回転翼を利用した飛行機にした場合は大きな質量の迅速な移動が必要となる。従って、この方式を飛行機の姿勢制御メカニズムに取り入れることはかなり難しいことが分かってきた。
【0055】
そこで、回転翼の前後移動に代えて、回転翼に発生する回転モーメントを回転翼の中で小さくし、調節する方法を発明する必要に迫られた。
【0056】
即ち、本発明には、特許文献1の発明を踏まえて、飛行機に利用でき、近似的に、鳥の羽ばたき運動を模擬しながら、回転翼の中に組入れて、その中心軸に発生する回転モーメントを飛行機のピッチング回転の制御を害さない程度に小さくするための実用的な回転翼の機構を発明する必要があった。
【0057】
発想の手掛かりに鳥のピッチング回転制御方法を観察してみると、鳥は、肩と腕と手での捻りを利用して、腕と手の両部分の捻り角度を調節していた。そして、羽ばたき半径の違いから生ずる手の部分と腕の部分の羽ばたき速度の違いを利用して、翼に入る空気の流入角を変えていた。図49〜図52を見よ。
【0058】
本発明の回転翼の機構に鳥の機構をそのまま組み込むことは、実用的には極めて困難である。その代わりに前方の要素翼の後流れを切り返して、空気の流れを偏向させて後方の要素翼に流入させる方式であれば実用的であり、機能上も代替え手段として有効と推定された。そこで、その可能性を、離陸準備から、離陸、加速、上昇、水平飛行、減速、降下、着陸、停止に至る全ての直線飛行モードについて検証し、回転翼を通過する空気の流れを制御する機構を発明する必要が生じた。
【0059】
そこで、回転翼の中央部付近に要素翼と同じ程度の長さで機体の外側に突き出した静止翼を設け、その静止翼で前側要素翼の後流を偏向させて後側要素翼に流し込めるようにし、しかもその偏向の度合いを調節できるようにするアイデアが生まれ、その実用性の検証が必要となった。
【0060】
一方、飛行機には、飛行条件の急変や飛行モードの変化に対応して、自律的に姿勢角を立て直し、適正に保つ機構が備わっていなければならない。
【0061】
しかし、文献1の発明では、飛行機の基礎的要件である飛行時の静安定性についての検討は十分ではなかった。
【0062】
即ち、回転翼ユニットを左右に取り付けた飛行機で、従来の飛行機に順ずるピッチング、ローリング、ヨーイング回転に対する静安定性が確保できるかどうかの検討は十分ではなかった。
【0063】
従来の飛行機は、基本的には、主翼とエルロン、水平尾翼とエレベーター、垂直尾翼とラダーで静的安定性を確保している。それに対して、本発明の飛行機は、主翼とエルロンに代えて回転翼を採用しているが、特に、ピッチング回転に対する静安定性を確保するためには、回転翼の運転中に推力と揚力と回転モーメントが複雑に関連して変化するため、従来の飛行機にはない特別な制御上の工夫が必要となると予想されていた。
【0064】
そこで、本発明では、特許文献1の発明を踏まえて、従来の飛行機の主翼とエルロンに代えて回転翼を組み込んだ飛行機の状態で、従来の飛行機に順ずる静安定性を成立たせるための新たな機構を発明する必要があった。
【0065】
即ち、本発明には、飛行中に、回転翼に発生する3次元の回転モーメントを抑えて、飛行機のピッチング、ローリング、ヨーイング回転に対する静安定性を確保するための実用的な飛行機の機構を提供する必要があった。
【0066】
具体的には、鳥や従来の飛行機に用いられている静安定化機構を調べ、回転翼に応用できそうな機構の原理を探り出し、実用性を検討した。
【0067】
機体のピッチング回転に対しては、従来の飛行機の水平尾翼とエレベーターに加えて、推力を発生するための回転翼の駆動に起因して回転翼中心軸に発生する回転モーメントによる機体のピッチング回転を打ち消す機能が必要なことが分かった。
【0068】
機体のローリング回転に対しては、回転翼全体を傾けて取り付けて上反り角を付けることが検討された。また、回転翼の下側に上反り角を持った補助静止翼をつけることも検討された。
【0069】
機体のヨーイング回転に対しては、従来の飛行機に準じて垂直尾翼とラダーを付けた。また、エルロンの機能は、回転翼の機能に含まれていると考えられたので、別にエルロンは付けなかった。また、回転翼の下側に上反り角を持った補助静止翼をつける場合は、それにも後退角を付けることが検討された。
【課題を解決するための手段】
【0070】
本発明は、上記課題を解決するために、特許文献1の発明をベースにして、機能を展開し、構造と機構の具体化を図ったものである。
【0071】
請求項1に記載の発明では、機体外側の端に内歯歯形を形成した翼ピニオンの穴に、機体内側から挿入した通しボルトを、機体内側の端に翼ピニオンの内歯歯形と回動不能にスキマ勘合する外歯歯形を形成し、機体外側の端に扁平な突起部分を持つ要素翼軸を貫通させ、更に、要素翼の心金を形成する中空長穴断面を有する管であるトルクチューブを貫通させ、機体内側の端にトルクチューブに勘合する扁平な突起部分を持ち、機体外側の端にベアリングの外輪を勘合させる穴を形成したエンドケースの機体内側の端に形成されたメネジ部に締結して一体化する結合構造とし、軽量で高い要素翼剛性と高い結合剛性を持った要素翼ケージ構造として実用的な回転速度を有する回転翼の構造とした。
【0072】
請求項2に記載の発明では、円筒面の稜線を回転軸とする複数の要素翼軸を回転翼盤上に配置した回転ユニットを支持ユニットの筒部に回動自在に勘着した回転翼において、それぞれの要素翼軸が、支持ユニットに連結されて静止している太陽歯車の周りを、太陽歯車と噛み合いそれぞれの要素翼軸に回転角度を伝達する歯車列によって、公転しながら同じ回転角度自転して戻るようにした平行回転翼において、支持ユニットの筒部の外筒側に太陽歯車と偏心リングを割出す機構を勘着し、筒部の内筒側に、太陽歯車と噛み合う複数の歯車列を取り付けた回転翼盤を回動自在に勘着し、各歯車列の中の複数の遊星歯車を回動自在に勘着したリテーナリングから突出されたアーム部分の先端部にジョイントピンで回動自在に勘着されたローラーを偏心リングの内筒面に接触させて、太陽歯車の中心と偏心リングの中心とローラーの中心とリテーナリングの中心とで4節リンクを形成し、回転翼盤の回転に伴って発生するリテーナリングの遥動回転を遊星歯車の遥動回転に変換し、歯車列の中で末端の翼ピニオンの遥動回転に変換し、回転円盤が1回転する間に1回転戻る翼ピニオンの回転に遥動回転を付加する機構を設け、より多くの要素翼を駆動できる、コンパクトで実用的な回転翼の機構とした。
【0073】
請求項3に記載の発明では、外歯歯車を持った駆動歯車を太陽歯車軸に勘合させ、その外歯歯車と噛み合う中継歯車をオフセットさせて回動自在に勘着し、外周にオフセットした軸受軸面を形成した内側偏心ディスクを勘着し、中継歯車と噛み合う内歯歯車を持ち、外筒部に偏心リングを形成した外側偏心ディスクを内側偏心ディスクの軸受軸面と回動自在に結合する軸受穴面に勘着させた偏心リング割出機構とし、内側偏心ディスクと駆動歯車の軸筒をそれぞれに回転させることにより偏心リングの偏心方向と偏心量を任意に割出せる機構を設け、回転翼の回転ギアーケースに内包し、太陽歯車の外周面との間から機体内側に突き出したことにより、偏心リングとローラーとの接触部分や遊星歯車機構を含む歯車列のオイル潤滑を可能にする実用的な回転翼の構造とした。
【0074】
請求項4に記載の発明では、偏心リングの内径側に、偏心リングの内径からローラーの外径の2倍を差し引いた外径を持ったランナーリングを、スベリ隙間を持たせて回動自在に勘着したことにより、コンパクトな構造でローラーと偏心リングの接触状態の保持と潤滑を確実にし、偏心リングとローラーとの接触部分や遊星歯車機構を含む歯車列のオイル潤滑を可能にする実用的な回転翼の構造とした。
【0075】
請求項5に記載の発明では、太陽歯車と噛み合う歯車列によって駆動されて回転する要素翼に加えて、それらの要素翼と連結されて回転する追従要素翼を追加して要素翼の枚数を増やした回転翼を取付けたことにより、より多くの要素翼を駆動できる、コンパクトで実用的な回転翼の機構を、必要に応じて選択できるように用意した。
【0076】
請求項6に記載の発明では、支持ユニットの筒部の穴に回動自在に勘着された回転翼盤の中心の穴に回動自在に勘着された中央静止翼の軸筒の機体外側の端に、内盤と外盤の間に要素翼とほぼ同じ長さの翼を挟んで一体化した静止翼ケージを固定し、軸筒の機体内側の端を回転させて回転角度位置を調節できる中央静止翼を設けたことにより、回転翼の中に組入れて、その中心軸に発生する回転モーメントを飛行機のピッチング回転の制御を害さない程度に小さくするための実用的な回転翼の機構とした。
【0077】
請求項7に記載の発明では、水平尾翼の機体外側の端に機体内側に向けて明けられた穴に、軸部を回動自在に勘着した外側翼を設け、機体内側から水平尾翼の内部を貫通して連結棒された連結棒の操作によりピッチング回転位置を調節し、飛行中に、回転翼に発生する3次元の回転モーメントを抑えて、飛行機のピッチング、ローリング、ヨーイング回転に対する静安定性を確保するための実用的な飛行機の機構とした。
【0078】
請求項8に記載の発明では、静止翼を回転翼の下方に機体から外側に突き出して装着し、ローリング回転とヨーイング回転に対する静安定を得るために、上反り角と後退角を付けられるようにし、飛行中に、回転翼に発生する3次元の回転モーメントを抑えて、飛行機のピッチング、ローリング、ヨーイング回転に対する静安定性を確保するための実用的な飛行機の機構とした。
【発明の効果】
【0079】
請求項1に記載の発明に関しては、トルクチューブにより要素翼単体の曲げ/捻り剛性を確保した。両端の結合部品である要素翼軸とエンドケースに形成された扁平な突起部分の挿入と、要素翼軸の外歯歯形を翼ピニオンの内歯歯形に回動不能に勘合することにより回転位置を合わせて廻り止めを図った。エンドケースは、翼ピニオンの内側から挿入され要素翼軸と要素翼のトルクチューブを貫通した通しボルトを、そのメネジ部で引き付け、要素翼の軸系を一体化し、曲げ/捻り剛性を高めた。エンドケースの外側のベアリングケースには与圧を掛けた2個のベアリングが装着され、回転翼端盤と要素翼との間に回転自在に高い結合剛性が得られた。このような手段により、軽量で高い要素翼剛性と高い結合剛性を持った要素翼ケージ構造として実用的な回転速度を有する回転翼の構造が提供された。
【0080】
請求項2に記載の発明に関しては、偏心リングを拡大し、リテーナリングとローラーアームを一体にし、アーム先端に1個のローラーを回動自在に取り付け、偏心リングの内筒面に当てて回転するようにしたことにより、より多くの要素翼を駆動できる、コンパクトで実用的な回転翼の機構が提供された。
【0081】
請求項3に記載の発明に関しては、内側偏心ディスクに外側偏心ディスクを回動自在に勘着させた偏心リング割出機構を回転ギアーケースに内包し、回転ギアーケースのディスク部の内径面と太陽歯車の軸筒外周面との間から外側に出された内側偏心ディスクと駆動歯車のそれぞれの軸筒の端を回転させることにより偏心リングの偏心方向と偏心量を任意に割出せるようにしたことにより、偏心リングとローラーとの接触部分や遊星歯車機構を含む歯車列のオイル潤滑を可能にする実用的な回転翼の構造が提供された。
【0082】
請求項4に記載の発明に関しては、ローラーが偏心リングの内径面とランナーリングの外形面との間で、遊びを規制され、遊動スキマにと油膜を保って自転し、滑りながら公転できるようにしたので、偏心リングとローラーとの接触部分や遊星歯車機構を含む歯車列のオイル潤滑を可能にする実用的な回転翼の構造が提供された。
【0083】
請求項5に記載の発明に関しては、歯車機構によって割出されて回転する要素翼に、それらの要素翼と連動して回転する追従要素翼を追加して要素翼の枚数を倍増でき、より多くの要素翼を駆動できる、コンパクトで実用的な回転翼の機構が提供された。
【0084】
請求項6に記載の発明に関しては、回転翼の中央部に機体の内側に突き出された静止翼の軸筒部で静止翼の回転角度位置を調節することにより、前方の要素翼の後流れを偏向させて後方の要素翼に流入させ、後方の要素翼に発生する空気力を制御でき、回転翼の中に組入れて、その中心軸に発生する回転モーメントを飛行機のピッチング回転の制御を害さない程度に小さくするための実用的な回転翼の機構が提供された。
【0085】
請求項7に記載の発明に関しては、水平尾翼の外側に、外側翼をピッチング回転方向に回動自在に勘着し、角度位置を機体の内側から水平尾翼を貫通する連結棒を介して調節できるようにしたため、飛行中に、回転翼に発生する3次元の回転モーメントを抑えて、飛行機のピッチング、ローリング、ヨーイング回転に対する静安定性を確保するための実用的な飛行機の機構が提供された。
【0086】
請求項8に記載の発明に関しては、ローリング回転とヨーイング回転に対する静安定性を確保するために寄与する、上反り角と後退角を持った下側静止翼を回転翼の下方に機体から外側に突き出して装着したため、飛行中に、回転翼に発生する3次元の回転モーメントを抑えて、飛行機のピッチング、ローリング、ヨーイング回転に対する静安定性を確保するための実用的な飛行機の機構が提供された。
【0087】
回転翼の下に同じ幅で静止翼を張り出すことは、ピッチング平行回転翼を貫流する気流が、前方から入りやや斜め後方に流出することが解析的に明らかにできたことから生まれたアイデアである。この気流は静止翼の位置と翼型を適切に選べば、静止翼上面の気流を加速するので、静止翼に大きな揚力を発生する高揚力機構が形成される。この原理は、従来の飛行機のエンジン排気やプロペラの後流れを主翼上面に当てるのと同じであるが、回転翼の後流の方が翼の上部を層状に流せるので効率を改善できる。
また気流を吹き降ろすヘリコプターではローターコーンの下に大きな静止翼を張り出すことは吹き下し流を堰き止めるので考えられる設計ではない。
【0088】
即ち、本発明により、左右の回転翼に発生する揚力、抗力、回転モーメントを調節することによって、飛行準備から離陸、上昇、加速、水平、減速、降下、着陸、停止に至るまでの全ての飛行モードにおいて、従来の飛行機に準じた機構で原理的に静安定性を確保できる見通しが得られた。
【0089】
本発明は、かなり複雑な制御機構にはなったが、従来の飛行機に準じた機体のローリング、ピッチング、ヨーイング回転に対する静安定性を備え、更に、Uターンやピンポイント着陸のような鳥の持つ多様な優れた飛行性能と操縦性能の開発に備えることができた。
【図面の簡単な説明】
【0090】
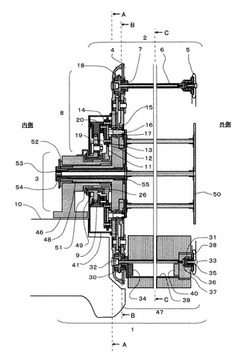
【図1】回転翼の機構を説明するための左側の回転翼の断面図
【図2】回転翼の機構を機体の左側から見たレイアウト図
【図3】回転翼の機構を図01のA−A断面矢視の左側面図
【図4】回転翼の機構を図01のB−B断面矢視の左側面図
【図5】回転翼の機構を図01のC−C断面矢視の左側面図
【図6】歯車列の伝導経路を説明する模式図
【図7】遊星歯車による遥動角の伝達についての説明タグ
【図8】遊動歯車による差動角度の計算式の説明図
【図9】遊動歯車による差動角度の計算式の説明タグ
【図10】偏心-遥動変換機構の説明図
【図11】偏心-遥動変換機構の4節リンクの説明図
【図12】偏心リング割出機構の機体内側から見た右側面図
【図13】偏心リング割出機構の断面図
【図14】偏心リング割出機構の機体外側から見た左側面図
【図15】偏心リングとローラーとライナーリングの関係の断面説明図
【図16】偏心リングとローラーとライナーリングの関係の左側面説明図
【図17】要素翼の取り付け部品である要素翼軸を機体外側から見た図
【図18】要素翼の取り付け部品であるエンドケースを機体中央側から見た図
【図19】中央静止翼を前から見た断面図
【図20】中央静止翼の左側面図
【図21】回転翼飛行機の外観三面図
【図22】要素翼に入る気流の流入速度ベクトルの説明図
【図23】6枚の要素翼を追従させた回転翼のレイアウト図
【図24】追従させた要素翼を小さめにした回転翼のレイアウト図
【図25】追従させた要素翼の翼型を変えた回転翼のレイアウト図
【図26】遥動機構を省いた簡易な回転翼飛行機の外観三面図
【図27】図26の回転翼の機構を説明するための断面図
【図28】図26の回転翼の機構を説明するための左側面レイアウト図
【図29】前上げ回転方式の理想モデルの回転翼飛行機の外観三面図
【図30】回転翼飛行機の機体の左側面図
【図31】試計算のために仮定した要素翼の空力特性グラフ
【図32】中央静止翼の作動原理の説明図
【図33】中央静止翼と外側翼の作用と要素翼の揚力の関係−1
【図34】中央静止翼と外側翼の作用と要素翼の揚力の関係−2
【図35】中央静止翼と外側翼の作用と要素翼の揚力の関係−3
【図36】中央静止翼と外側翼の作用と要素翼の抗力の関係−1
【図37】中央静止翼と外側翼の作用と要素翼の抗力の関係−2
【図38】中央静止翼と外側翼の作用と要素翼の抗力の関係−3
【図39】前下げ回転方式の場合の各種制御入力ファクターの影響−1
【図40】前下げ回転方式の場合の各種制御入力ファクターの影響−2
【図41】前下げ回転方式の場合の各種制御入力ファクターの影響−3
【図42】前下げ回転方式の場合の各種制御入力ファクターの影響−4
【図43】前上げ回転方式の場合の各種制御入力ファクターの影響−1
【図44】前上げ回転方式の場合の各種制御入力ファクターの影響−2
【図45】前上げ回転方式の場合の各種制御入力ファクターの影響−3
【図46】前上げ回転方式の場合の各種制御入力ファクターの影響−4
【図47】理想モデルの回転翼飛行機の飛行モードの説明図
【図48】理想モデルの回転翼飛行機の飛行システムの説明図
【図49】鳥の翼の骨格と人間の手の骨格の対比の説明図
【図50】鳥の羽ばたき速度ベクトルの説明図
【図51】羽ばたき翼と回転翼の流入気流ベクトルの違いの模式図
【図52】羽ばたき翼と回転翼の流入気流ベクトルの違いの説明図
【図53】鳥の羽根の間のスキマ開閉機構の説明図
【図54】鳥の羽ばたき中の翼の折り方の一例を示す模式図
【図55】鳥の胸の骨格と胸筋の説明図
【発明を実施するための形態】
【0091】
鳥は、打ち下し工程と跳ね上げ工程を繰り返す羽ばたき運動の中で推力と揚力を得ながら、体がピッチング回転しないように制御している。
【0092】
その間には、次のような色々なメカニズムによって必要な空気力を発生し、制御しているように見える。その様子を図49〜図55の模式図を使って説明する。
【0093】
・ 羽ばたき運動では、翼の手の部分と腕の部分とでは翼の速度が大きく変わるため、飛行速度と羽ばたき速度のベクトル和である流入速度が変わる。図51を見よ。
・ 工程中に、翼を付ける肩と腕と手の関節を利用して翼を捩じることにより、それぞれの部分に必要な迎角を得ている。図49を見よ。
・ 工程中に、空気力による羽根の撓みと捻れを利用して、風切り羽根の隙間を広げて空気を逃がし、あるいは閉じて流れを変えている。図53を見よ。
・ 鳥を前方から見た翼の展開形状を跳ね上げ工程では上凸にして空気を外に逃がし、打ち下し工程では空気を押し下げて翼上面に巻き込む。図54を見よ。
・ 跳ね上げ工程の速度と打ち下し工程の速度を変えて、上向きと下向きとで発生する空気力を変えている。ただし、必ずしも、常に、打ち下し速度を跳ね上げ速度より速くしているわけではない。
・ 鳥は、跳ね上げ用と打ち下し用で別の筋肉を使っているが、それらの筋肉の剛性の違いを利用して、翼の梁としての撓み形状を変えている。図54、図55を見よ。
・ 軟構造を利用して手や指の曲がりや捻れのタイミングを遅らせて空気力の急変を防止している。
【0094】
特許文献1の発明では、鳥の持つ巧妙な羽ばたき機構をそのままではないが、やや複雑なままに模擬するために、回転する円筒面の稜線上に複数の要素翼を配置し、それらを、基本的に平行を保ちながら、周期的に遥動を加えて回転させることにより、鳥の羽ばたき運動の打ち下し工程と跳ね上げ工程を近似的に模擬している。
【0095】
流体力学の翼理論によると、翼に発生する空気力の作用点である風圧中心は翼の前端から翼弦の25%付近にある。一方、キャンバーの付いた翼では前下げモーメントが発生するが、翼弦の25%付近にある空力中心をとると、回転モーメントの大きさは迎角が変わっても殆ど変わらなくなる。その他に翼には遠心力と慣性力と慣性モーメントが発生する。回転中心を決めると、要素翼にはこれらに起因して回転モーメントが発生する。そのため、要素翼の回転中心は翼端から25%の位置とは限らず、設計仕様に応じて最適な位置があると思われる。しかし、要素翼の回転中心を決める設計理論は、まだ開発できていないので、今は、要素翼に発生する空気力によって要素翼の回転中心周りに発生する回転モーメントは回転翼を回転翼中心軸廻りに回転させる回転モーメントと比べて小さいと考えられるので、無視して、回転中心は翼弦の50%の位置としておく。
【0096】
一方、回転翼中心軸には、各要素翼に発生する空気力が回転翼中心軸廻りに発生する回転モーメントの総和として、大きな回転モーメントが発生する。
【0097】
回転翼中心軸に発生する回転モーメントは飛行中の機体にピッチング回転運動を発生させるので、ピッチング回転翼飛行機の設計において、当面の最も重要な解析課題であった。
【0098】
解析に先立ち、要素翼の操作方法に関して、次を確認しておく。
・ 太陽歯車軸の回転角を調節することで全要素翼の取付け角γを同時に同量、同方向に増減できる。
・ 偏心-遥動変換機構と遊星歯車を用いて差動させる遥動付加機構によって偏心リングの偏心量eを変えることによって、打ち下し工程と跳ね上げ工程で、互いに反対方向に要素翼の遥動角δを増減できる。
・ 回転翼の回転速度を変えることにより、要素翼に入る空気の流入角度を調節できる。
・ 前側の要素翼の後流れによって、後側の要素翼に流入する流れが影響を受ける。この影響は中央静止翼により流れを偏向させることにより調節できる。
【0099】
以上を踏まえて、特許文献1をベースにして、要素翼とその駆動機構の機構を見直し、構造を簡潔にし、新たに、回転翼の中央部に、前方の要素翼の後流れを偏向させて後方の要素翼に流入させる中央静止翼を設けた。主な設計検討事項は下記の(1)から(7)の通りである。図01〜図29を用いて説明する。
【0100】
・ 要素翼単体とその両端の結合剛性を高めた。
要素翼を構造解析上は扁平管のトルクチューブとし、その内側の結合部品である要素翼軸を翼ピニオンに回動不能に勘合し、要素翼を当て、翼ピニオンの内側から通しボルトで貫通させ、エンドケースのメネジで引き付けて要素翼軸系を一体に結合させた構造とした。そのために設計上、以下の事項を配慮して、軽量で高い要素翼剛性と高い結合剛性を持った要素翼ケージ構造を設計した。
【0101】
・ トルクチューブの扁平な穴に勘合する扁平な突起部分を要素翼軸の外側端とエンドケースの内側端に形成し、合わせ面の位置決めと回転角度位置の位置決めと回転トルクの伝達を図る。
・ 翼ピニオンの外側端には内歯歯形を形成し、要素翼軸の内側端に形成した外歯歯形と回動不能にスキマ勘合して、回転トルクの伝達と位置決めを図った。
・ 翼ピニオン、要素翼軸、トルクチューブ、エンドケースを全て端面で突き当てて、通しボルトで軸方向に締め切って、要素翼系の一体化を図り、曲げ/捻り剛性を高めた。
・ 要素翼の回転中心の位置の変更が、トルクチューブの長穴の範囲で、要素翼軸とエンドケースを変えるだけで、要素翼を変えずにできるようにした。
・ エンドケースの外側端には、与圧を掛けた2個のベアリングを勘着するハウジングを形成し、回転翼端盤との間で回動自在に高い結合剛性を確保できるようにした。
【0102】
・ 要素翼の個数を増やせるようにした。
次の工夫により、偏心-遥動変換機構をコンパクトにし、レイアウトを改善した。その上で、歯車列で駆動された要素翼に連動する追従要素翼を追加することによって要素翼の数を倍増できる設計オプションも用意した。図01、図02、図23〜図25を見よ。
【0103】
・ 偏心リングの径を大きくした。
・ ローラーアームとリテーナリングを一体化した。
・ ローラーを1個にして偏心リングの内周面を転導させた。
・ 全てのローラーの遊びを偏心リングの中心側から規制するランナーリングを新設した。
【0104】
要素翼の本数の増加には次のメリットがある。
a. 要素翼が細長くなり、アスペクト比が大きくなり、翼型の空力性能が向上する。
b. 要素翼の軽量化により、回転数のアップが図れる。
c. 回転翼の脈動周波数を上げられ、回転をスムーズにできる。
d. 回転翼の中央部分に中央静止翼を設置するスペースが確保される。
e. 要素翼表面の空気の通過経路を短くし、通過時間中の迎角変化を小さくできる。
【0105】
なお、追従要素翼は、従来の飛行機のフラップの機能を持つようにも設計できるが、その設計スペックは、個別の開発の中でメリットとデメリットを勘案しながら決めてゆかねばならない。
【0106】
(3)オイル潤滑を可能にした。
そのために、次のオイル潤滑を必要とする範囲を外部からシールできる回転ギアーケースに包み込んだ。偏心リング割出機構は、そのために新設計した。図01〜図02、図12〜16を見よ。
・ 太陽歯車から反転歯車までの歯車列
・ ローラーと偏心リングの接触点
・ 偏心リング割出機構
【0107】
(4)軸受け方式を選定してレイアウトと構造を見直した。
ラジアル方向では、転がり軸受けとスベリ軸受けを使い分けた。スラスト方向(幅方向)では、隣接して相対運動する部品の間に潤滑スペーサーを挟んだ。図01を見よ。
【0108】
(5) 剛性アップとコンパクト化のために部品構成を見直した。図01を見よ。
【0109】
(6)機体のピッチング回転の制御を確実にするために、次の機能を担う中央静止翼を設定した。図01、図05、図19〜21、図26〜図29を見よ。
・ 斜め後下方に流出する前側の要素翼の後流れは、そのまま後側の要素翼に流入させると回転翼に発生する回転モーメントを過大にしてしまうことがあるので、中間で流れを偏向させてその影響を補償する。
・ 鳥は推力を分担する手の部分と揚力を分担する腕の部分を適度に捻ってそれぞれに最適な迎角を得ている。回転翼では、この機能を歯車機構により作り出している。即ち、打ち下し工程と跳ね上げ工程で要素翼を機械的に反対方向に遥動させ、両工程で適切な迎角を持って流入気流に向かわせる機構としている。しかし、この機構の機械的な動きなので、両工程で最適な迎角になるように調節し、また、状況に応じて制御することはできなかった。それを可能にするために中間で流れを可変に偏向させる機能を追加した。
【0110】
(7) 飛行時の機体のピッチング回転に対する静安定性を確保するために、新たな機能を追加した。即ち、従来の飛行機では主翼の空気力を発生する位置が前後方向でほとんど移動しないので、鳥の羽ばたき翼の機能を主翼とプロペラに置き換えられ、発生する機体をピッチング回転させる回転モーメントは水平尾翼のエレベーターの操作で制御できた。
【0111】
ピッチング回転翼飛行機も従来の飛行機のプロペラと同じように抗力に打勝つトルクで要素翼を回転させて空気力を発生し、その成分として揚力と推力を得ている。従来の飛行機では駆動トルクの反動は機体をローリング回転させるが、長いスパンの主翼の端のエルロンでバランスを取っている。ピッチング回転翼飛行機では、この駆動トルクの反動は機体をピッチング回転させる。この反動は加速や減速の際に必然的に発生するので、水平に飛行するためには、常に、バランスさせる必要がある。この機能は、従来の飛行機の水平尾翼とエレベーターの機能とは別に備えなければならない。機体の後部に迎角可変の静止翼を、従来の飛行機の水平尾翼とは別に、外側翼として新設した。図21、図26、図29を見よ。
【0112】
飛行時のローリング回転に対する静安定性を確保するためには、鳥も従来の飛行機も主翼に上反り角を付けているが、それに倣って、上反り角を機体の重心付近の翼につけた。図21、図26、図29を見よ。
上反り角は、回転翼と下側静止翼のどちらかまたは両方に付ける。下側静止翼には、オプションとして、折畳めるエキステンション(延長静止翼)を付けることもできる。
【0113】
要素翼の先端や中央静止翼の先端に別の補助翼をつけるアイデアも種々検討された。重心から遠い位置で流入気流や回転翼の伴流を処理すると効きのよい姿勢制御やドリフティング制御が可能になりそうである。ハチドリやヒバリのような作業用ロボット用の回転翼飛行機を狙う場合には有効と思われるアイデアが続々と出てくる。しかし、この領域まで含めると発明活動が余りに輻輳するので、今の段階では、この領域はもう一つの進化の幹と考えて、具体化の検討は留保した。
【0114】
また、全幅を広げ、構造を複雑にしてしまうこの領域のアイデアは、翼のスパンを従来の飛行機と比べて半減できる回転翼飛行機の商品性の特徴を著しく損なうとも判断した。
【0115】
飛行時の機体のヨー回転に対する静安定性は、従来の飛行機では、主翼の後退角と垂直尾翼とラダーによって確保されている。回転翼を用いた飛行機では、これに準じて、垂直尾翼とラダーは取り付けた。しかし、回転翼を後退角をつけて取り付けることは、回転翼のヨー回転コントロール特性が解明されるまで採用を留保した。カラスが水平面内でシャープにUターンする挙動を見ると、平行回転翼には固定翼の性能を補って余りあるヨーイング回転に対する静安定性と操縦性を獲得できる新しい工夫の余地が残されていると予感している。
【0116】
近い将来の実用化を展望して、遥動機能を退化させた、シンプルな回転翼の検討に着手した。ハクチョウは、翼の捻り機能を退化させて、タカのような多様な飛行術を放棄して長距離飛行能力と餌を安全に豊富に採れる水上生活能力を獲得した。羽ばたきは緩慢で迎角の変化は、翼の形状や弾性変形や関節の僅かな捻れによって得ているように見える。ハクチョウの羽ばたきでの、翼や羽根の変形と動きを別の方法で模擬できれば、また、短い滑走路の使用が許されれば、ピンポイントで離着陸する機能を退化させ、実用的に大変魅力的な短い滑走路で離着陸できる飛行機が可能となるかもしれない。図26〜図29を見よ。
【0117】
次に、以上のように設計した回転翼を用いて色々な飛行モードで飛行する時にどのような空力性能が得られ、どのような姿勢制御ができるかをラフな計算で定量的に検証してみた。図30〜図48を用いて説明する。
【0118】
この飛行機は、走行風と回転速度のベクトル和で流入する空気を回転翼で受けて空気力を発生し、助走なしで舞い上がることもできる。また、助走が許される場合は走行速度を上げながら回転翼の回転速度も加速できる。回転翼に入るエネルギーは機体の助走運動エネルギーと回転翼の回転運動エネルギーに按分されて蓄積される。実際、鳥の助走の仕方は種によって様々である。
【0119】
助走なしで舞い上がる時には、回転翼は次のように操作される。図32〜図35を見よ。
A.回転速度を、離陸回転速度にセットし、負荷に対して駆動力を増す制御をする。
B.取付け角を調節して、全ての要素翼の迎角を大きくし、揚力を大きくする。
C.遥動角を調節して、前後の要素翼の迎角を大きくし、推力を上げる。
D.中央静止翼の切り返し角を調節し、ピッチング回転モーメントを制御する。
【0120】
鳥はそれぞれの種によって固有の羽ばたき周波数を持っていて、周波数は大きく変えずに振幅を調節して羽ばたき速度を変えている。それに対し、回転翼では振幅は変えられないが、代わりに回転数を調節して回転速度を変えることができる。図50〜図52を見よ。
【0121】
それぞれの飛行モードでの飛行操作としては色々な手順がとれるが、一例を示す。
着陸地点では、推力を下げ、徐々に迎角を大きくして揚力を維持しながら抗力を上げ、飛行速度を下げて、空中に停止し、その後は、迎角を小さくしながら回転速度を上げて軟着陸する。飛行速度が十分に下がっている場合は、着陸ポイントに降下し、惰走なしで停止できる。飛行速度を残して着陸する場合は、着陸後は制動を掛けながら惰走し停止する。地上では踏ん張れるので、負の揚力や失速で発生する大きな抗力を発生して急制動を掛けることもできる。
【0122】
回転翼にしたために要素翼の揚力によって発生してしまう回転モーメントは中央静止翼によって調節できることが分かった。一方、要素翼の抗力によって発生する回転モーメントは、機体をピッチング回転方向に回転させるが、揚力に起因する回転モーメントと比べて一桁小さい。しかし、飛行のために必須な回転翼駆動トルクであり、水平尾翼の外側に取り付けた外側翼に発生させる揚力でバランスを取らねばならない。図33〜図38を見よ。
【0123】
従来の飛行機は、エンジンでプロペラを駆動して得られた推力と機体の抗力との差し引きで加速力を得ている。回転翼飛行機も翼理論に則って設計されているので、飛行機と同じく、エンジンで回転翼を駆動する回転トルクによって推力を得る。
【0124】
従来の飛行機では駆動トルクの反力はローリング回転方向でキャンセルされるが、回転翼ではピッチング方向でキャンセルされねばならない。回転翼の駆動トルク反力は、飛行機の後部の外側翼に発生させる揚力に回転翼中心までの距離を掛けた回転モーメントでキャンセルするように設計した。
【0125】
分かり易さのために、揚力により発生する空気力と回転モーメントは、最初、要素翼や補助翼に発生する抗力をゼロとして計算したが、その後、駆動トルクと推力と抗力の関係を定量的に理解するために、要素翼や補助翼に発生する揚力をゼロにして、抗力により発生する空気力と回転モーメントを試算してみた。図33〜図38を見よ。
【0126】
これまでは要素翼の翼型については詳しく論じてきてはいないが、従来の静止翼の翼型の利用の可能性と限界を見ておく必要がある。この問題の存在は要素翼へ流入する気流ベクトルを回転翼と羽ばたき翼と固定翼で比較してみると容易に推定できる。図22に模示するように、気流の分子(○印で示す)は、1から時間を追って2,3、、、、と順番に要素翼に流入する。更に、要素翼の周期的な遥動が重なると翼面を通過する空気が翼面によって曲げられる。そのため、それぞれの分子が要素翼から抜けるまでに要素翼を取り巻く流束の形が変わる。
【0127】
一方、回転翼での常用流速は、0〜40m/s程度に設計される。この速度は340m/sの音速と比べて1/10に近い。また、流束の変化も衝撃波を発生するような急変ではない。また、飛行速度が回転速度より十分大きく、要素翼の本数が多く、要素翼の翼弦が十分小さくなると、従来の静止翼の翼型が利用できるであろう。
今はまだこのような条件を踏まえた流れの解析と翼型の設計理論ができていない。従って、実務的には、翼型の開発は、設計仕様に従って迎角の変化を設計し、基準翼型を仮設計して試作し、キャンバー、翼厚、回転中心などを、できれば風洞を使って実験しながら、チューニングしてゆくことで開発できるであろう。しかし、開発効率を高めるためには流体力学の専門家の解析とシミュレーションが必須である。ピッチング回転翼のための翼型設計理論の開発は今後の最も重要な設計準備課題として残されている。
【0128】
回転翼の回転方向は前上がり方向に回転させても揚力と推力を発生できる。基本方式としてどちらが有利かはまだ判断できていない。回転方向を飛行中に変えることは鳥もやっておらず不自然である。回転方向は、オートローテーション時も含めて同じ方向にしたい。その可能性は、今後、見極めてゆきたい。今の時点では、理想モデルとして、前上がり回転方式を選んでおく。機能の違う水平尾翼と外側翼を分離独立させ、下側静止翼の外側には折れる補助翼をつける。要素翼の弾性効果や形状効果を進化させ、回転翼の遥動機能は退化させる。姿勢角は鳥のように進行方向に向けて飛行するモードとする。ここまで進化させられると、ピッチング回転翼飛行機は従来の小型飛行機と比較し、機能の類似と違いを明らかに主張できるようになるであろう。図29、図43〜図48を見よ。
【実施例1】
【0129】
平行回転翼の原理については、参考文献1に詳しく説明されている。それを踏まえて、本発明では、アイデアの具体化を図りながら、新たな工夫を織り込んで基礎設計を試みた。まだ中間段階であるが、これまでに得られた知見を纏めた。その概要を、次の項目に従って、図01〜図29を用いて説明する。
【0130】
(1)回転翼1の要素翼6のアスペクト比の増大を狙って、枚数を増やして翼弦を小さくするために、ローラーアーム21をリテーナリング14と一体化し、偏心リング20の径を大きくし、偏心-遥動変換機構24を再設計した。図01、図02、図10〜図12、図15、図16を見よ。
【0131】
(2)回転翼1の要素翼6のアスペクト比の増大を狙って、枚数を増やして翼弦を小さくするために、追従要素翼28をオプションとして用意した。図23〜図25を見よ。
【0132】
(3)回転翼1の回転速度の確保を狙って、複数の要素翼6を回転自在に結合した要素翼ケージ47の構造を軽量化しながら高剛性にするために、軸受けの選定とその取付け構造、および、要素翼6の基本断面とその結合構造を設計した。図01、図12、図17、図18、図27を見よ。
【0133】
(4)回転翼1の回転速度の確保を狙って、動力伝導系を成り立たせるために、伝導方式の使い分け方針を仮決めした。図01、図02、図06、図27を見よ。
【0134】
(5)回転翼1の回転速度の確保を狙って、支持系を成り立たせるために、回転部品と支持部品をレイアウトし、転がり軸受けとスベリ軸受けの方式選定方針を決めた。図01、図27を見よ。
【0135】
(6)回転翼1の回転速度の確保を狙って、歯車とローラーのオイル潤滑を可能にするために、新しい偏心リング割出機構9を設計し、回転ギアーケース41内に収めながらシールされた軸筒を外から回転して操作できるようにした。図01、図02、図12〜図14を見よ。
【0136】
(7)回転翼1に発生する回転モーメントの制御を狙って、前側の要素翼6から流出する後流れを偏向させて後側の要素翼6に流入させるために、新たに、回転翼1の中央付近に中央静止翼50を新設した。図01、図05、図19〜図21、図26、図29を見よ。
【0137】
(8)飛行機90に発生するピッチング回転に対する静安定性の確保を狙って、回転翼では抑えきれないピッチング回転モーメントを制御するために、新たに、水平尾翼67の側端に外側翼66をピッチング回転軸廻りに回転角を割出せるように取り付けた。図21、図26、図29、図33〜図38を見よ。
(9)飛行機90に発生するローリング回転に対する静安定性の確保を狙って、短いスパンのであることを考慮して、従来の飛行機に倣って回転翼1そのものを上反り角度分傾斜させて取り付けた。また、オプションとして、回転翼1の下方に下側静止翼70を機体から外側に突き出して取り付けた場合には、この翼にも上反り角を付けるた。図21、図26、図29を見よ。
【0138】
(10)飛行機90に発生するヨーイング回転に対する静安定性の確保を狙って、従来の飛行機に倣って、垂直尾翼68を設定し、水平尾翼64と外側翼66に後退角をつけた。また、オプションの下側静止翼70にも後退角をつけた。図21、図26、図29を見よ。
【0139】
(11)回転翼飛行機の現時点での理想モデルの設計。
ツルのような大型の渡り鳥の水平飛行では、翼を構成する羽根自体の弾性の非線形性や非対称形状を利用して、打ち下ろし工程で発生する揚力が跳ね上げ工程で発生する揚力より大きくなる非対称な羽ばたき運動が起されているが、この間には回転モーメントも両工程で相殺されていると推察される。
【0140】
機械的な遥動付加を不要にできるピッチング回転翼は非常に魅力的であるので、遊星歯車機構を一つの中間歯車に置き換え偏心-遥動変換機構と偏心リング割出機構を省き、平行回転だけの単純な歯車列とした回転翼飛行機を研究用に設計した。図26〜図29を見よ。
【0141】
以下、これらの新たに織り込まれた設計項目に従って説明する。
(1)要素翼1の枚数を増すための偏心-遥動変換機構24の再設計について、図01〜図05、図10〜図12、図15、図16を用いて説明する。
【0142】
本発明の回転翼1では、要素翼6の傾斜角αを周期的に変動させることにより、打ち下し工程と跳ね上げ工程を同時に発生している。そして、飛行中の飛行モードの切り替えに応じて、揚力と推力と回転モーメントを、より的確に制御するために、要素翼6のみを用いた特許文献1の回転翼に中央静止翼50を組み込んだ。
【0143】
回転翼1は、回転ユニット2と支持ユニット3とから構成されている。回転ユニット2は支持ユニット3に回転自在に取り付けられている。支持ユニット3はボディー10に取付けられる。回転ユニット2は、ボディー10に搭載された動力源から駆動される。
【0144】
回転ユニット2には、回転翼盤4と回転翼端盤5との間の外周に近い円筒面上の稜線を回転軸とする複数の要素翼6が渡され、それぞれの要素翼軸7を介して翼ピニオン18に結合されている。回転翼盤4の内部には、それぞれの要素翼6を周期的な遥動を付加しながら平行回転させる歯車列8と、遥動角を付加する偏心-遥動変換機構24と、偏心量eと偏心角ηを割出して伝達するための偏心リング割出機構9が組み込まれている。
【0145】
回転翼盤4には、図1、図6に示すように、支持ユニット3に連結されて静止している一つの太陽歯車11から放射状に展開する要素翼6毎に歯車列8が組み込まれており、これによって平行回転に遥動回転を加えることができる。この機構の原理については、特許文献1に詳しく説明されている。
【0146】
各歯車列8の中では、太陽歯車11に従動歯車12が噛み合わされている。従動歯車12には同軸に内歯歯車13が形成されていて、その内歯歯車13には、互いにリテーナリング14で回動自在に連結された複数の遊星歯車15が噛み合わされており、それらの遊星歯車15は、従動歯車12と同軸で遊動する反転歯車16に噛み合わされている。反転歯車16には同軸にオフセットさせて反転ピニオン17が結合されており、その反転ピニオン17から、要素翼6の一部である要素翼軸7が結合される翼ピニオン18に、タイミングベルトA42〜中間ピニオンA44〜中間ピニオンB45〜タイミングベルトB43からなるタイミングベルト伝導を介して回転が伝えられる。図06を見よ。
【0147】
遊星歯車15を回動自在に嵌合しているリテーナリング14が遥動しない時には、各要素翼6が回転翼盤4に乗って回転する回転角は、それぞれの歯車列8の中で反転され、同じ回転角だけ戻される。従って、各歯車列8は、基本的に、各要素翼6を初期に設定された取付け角γを保ったまま平行回転させる機構となっている。
【0148】
回転翼盤4が回転すると、従動歯車12が、支持ユニット3に連結されて静止している太陽歯車11を駆って、回転翼盤4上で回転する。従動歯車12と同軸の内歯歯車13は従動歯車12と同じ角度を回転翼盤4上で回転する。その内歯歯車13に噛み合っている遊星歯車15は、回転翼盤4上で止まっているリテーナリング14に遊星歯車ジョイントピン19で回動自在に嵌合されているので、内歯歯車13を駆って反転歯車16を反転させる。
【0149】
遊星歯車15を回動自在に嵌合しているリテーナリング14が遥動する時には、リテーナリング14は、回転翼盤4の回転位置に応じて内歯歯車13の回転と反転歯車16の間で伝達される回転角を加減(差動)し、周期的に要素翼6の回転角度θを進め、または、遅らせる。反転歯車16の回転は、同軸にオフセットして固定されている反転ピニオン17に伝えられ、そこから更に、タイミングベルト伝導を介して、翼ピニオン18に伝えられる。図6〜図9を見よ。
【0150】
次に、この発明で大幅にコンパクト化を図った、平行回転する要素翼6に周期的に遥動回転を付加する偏心-遥動変換機構24について説明する。この機構は、打ち下し工程と跳ね上げ工程とで要素翼6の傾斜角αを反対方向に遥動させるための機構の一部であり、偏心リング割出機構9で割出される偏心量eと偏心角度ηを、リテーナリング14の遥動角ζに変換する。図10〜図11を見よ。
【0151】
遊星歯車15を回動自在に結合しているリテーナリング14から突出されたアーム部分にはローラーアーム21が形成されており、その先端部には1個のローラー23がジョイントピン22で回動自在に結合されている。
【0152】
ローラー23は偏心リング20の内面を転動し、偏心リング20の中心の周りに回転するので、偏心量eと偏心角度ηは、4節リンクの動きによってリテーナリング14の遥動回転に変換される。
【0153】
偏心量eと偏心角度ηは、別途、回転ユニット2に内包される偏心リング割出機構9によって割出された偏心リング20の位置から検出される。
【0154】
リテーナリング14の中心とそのアーム先端部のジョイントピン22の中心とを結んだ線と、偏心リング20の中心とジョイントピン22の中心とを結んだ線は、ほぼ、直角になるように設計される。そのため、偏心リング20の内周面を転動するローラー23の動きは、リテーナリング14のアーム先端部のジョイントピン22の中心とリテーナリング14の回転中心の間の距離をアーム半径とした、リテーナリング14の遥動回転に変換される。
【0155】
偏心量eと偏心角度ηが与えられるとリテーナリング14は、与えられた偏心量eと偏心角度ηによって変形する4節リンクによって変換された遥動角ζで、遊星歯車15の中心を結んだ円周上を周期的に遥動する。この遥動は内歯歯車13に対して遊星歯車15を遥動回転させ、遊星歯車15に噛み合った反転歯車16を遥動回転させ、反転ピニオン17、タイミングベルト伝導を介して翼ピニオン18に伝えられて、各要素翼6を遥動回転させる。
【0156】
レイアウト上、偏心リング20の径は大きめに設定した。
【0157】
偏心-遥動変換機構24は、図01、図02、図03、図15、図16に示すように、一つの偏心リング20の形状を、複数のローラーアーム21が、同一平面上で、同時に追跡する機構としている。
【0158】
偏心リング20の内周面を一つのローラー23で追跡する時、ローラー23はローラーアーム21の遠心力によって内周面に押し付けられるが、偏心運動中の駆動反力、駆動抵抗、加速度や振動によって離れる可能性がある。そこで、全てのローラー23に偏心リング20の中心の側から接して自由に回転するランナーリング27を設定し、全てのローラー23遊びを同時に相互に規制させた。
【0159】
各ローラー23とランナーリング27との間には原理的に周期的なスベリが発生するが、オイル潤滑されるので適切なスベリ隙間を与えれば振動を抑えて焼付かずに運転できる。
【0160】
この新方式によって、偏心-遥動変換機構24をコンパクトにし、ローラー23のオフセット(ローラー23と遊星歯車15の間の軸方向の距離)も小さくできた。
【0161】
(2)追従要素翼28のオプションについて、その一例である、図23〜図25を用いて説明する。
【0162】
要素翼6に補助的に追従要素翼28を連動させることによって、近似的に要素翼数を倍増できる。図23は、歯車列8で駆動される6枚の要素翼6に6枚の追従要素翼28をタイミングベルト29で連結させて12枚としたレイアウトを示す。図24は、追従要素翼28を小さめにし、タイミングベルトの噛み合いをずらして取付け角を変えたレイアウトを示す。図25は、更に、追従要素翼28の翼型を変えたレイアウトを示す。連結方法は、チェーンでも歯車でも構わない。また、連結方向は、追従する方向でも先行する方向でも構わない。2重に連結させれば3倍増も可能である。
【0163】
(3)要素翼6の軸受けの選定とその取付け構造、および、要素翼6の基本断面とその結合構造について説明する。重負荷用の転がり軸受方式と軽負荷用の滑り軸受方式の2方式について設計した。両方式の設計例を図01、図02、図17、図18、図27に示す。
【0164】
転がり軸受け方式では、図01に示すように、回転翼盤4の側と回転翼端盤5の側の双方に、2個ずつのアンギュラー玉軸受を与圧を掛けて装着し、回転は許しながら、高い倒れ剛性を持たせた。
【0165】
即ち、回転翼盤4の側については、2個の内側用アンギュラー玉軸受30の内輪で翼ピニオン18を挟み、台形バネで両外輪に与圧を掛けて回転翼盤4の穴に装着した。要素翼6に接合されている要素翼軸7は翼ピニオン18に嵌めて通しボルト32で引き付けて締結した。
【0166】
回転翼端盤5の側については、2個の外側用アンギュラー玉軸受31の内輪を、シムを挟んでツバ付ボス35に嵌め、リングナット36で固定し、外輪を薄めのシムを挟んでエンドケース37に挿入し、エンドリング38を端面に当てて複数のボルトで締め切った。与圧は内外輪に挟んだシムの厚さの差によって掛けられる。回転翼端盤5はツバ付ボス35の中心のメネジにボルト33で締結した。
【0167】
要素翼6の基本断面としては、要素翼6の軸部分にトルクチューブ39を形成し、その回転翼端盤5の側はエンドケース37に突き当てた。トルクチューブ39の周囲に翼型を形成する方法については、種々考えられるが、今の段階では、トルクチューブ39を心金にした樹脂の射出成形を想定しておく。要素翼軸7とエンドケース37の採用により、軸受で決まる要素翼6の回転中心とトルクチューブ39の位置をずらすことが容易となった。
【0168】
外側端に内歯歯形を形成している翼ピニオン18の中央の穴に、内側から挿入した通しボルト32を、内側端に翼ピニオン18の内歯歯形と回動不能にスキマ勘合する外歯歯形を形成しており、外側端にトルクチューブ39に勘合する扁平な突起部分を持つ要素翼軸7の穴に貫通させた。次に、要素翼6の心金を形成するトルクチューブ39に貫通させた。更に、内側端にトルクチューブ39に勘合する扁平な突起部分を持ち、外側端にベアリング31の取り付け構造を形成したエンドケース37の内側端の中央に形成されたメネジ部に締結して一体化する結合構造とした。
【0169】
この構造により要素翼6単体の曲げ/捻り剛性が確保された。両端の結合部品である要素翼軸7とエンドケース37に形成された扁平な突起部分のトルクチューブ39への挿入と、要素翼軸7の外歯歯形を翼ピニオン18の内歯歯形に回動不能にスキマ勘合することにより回転方向の位置合わせと廻り止めが図れた。翼ピニオン18の内側から挿入され要素翼軸7と要素翼6のトルクチューブを挟んで貫通した通しボルト32を、エンドケース37のメネジ部で引き付けることにより、要素翼系の一体化を図り、曲げ/捻り剛性を高めた。エンドケース37の外側のベアリングケースには与圧を掛けた2個のベアリング31を装着し、回転翼端盤5との間で回動自在に高い結合剛性を確保した。このような手段により、軽量で高い要素翼剛性と高い結合剛性を持った要素翼ケージ56が得られ、高い回転速度を有する回転翼1の構造が設計できた。
【0170】
滑り軸受け方式では、図27に示すように、回転翼盤X72の側と回転翼端盤X85の側の双方共、それぞれにツバ付ブッシュA75、ツバ付ブッシュB76を2個ずつ、微小な滑りスキを持たせて挿入し、回転は許しながら、撓やかな立体ラーメンの篭を形成して倒れを規制する構造とした。
【0171】
即ち、回転翼盤X72の側については、2個のツバ付ブッシュA75で従動歯車X84を挟み、それらを回転翼盤X72の穴に回動自在に勘着した。要素翼X86に接合されたツバ付ボスA79は従動歯車X84に嵌めて通しボルトA73によりエンドケース77とトルクチューブ89を介して引き付けて止めた。図27を見よ。
【0172】
回転翼端盤X85の側については、2個のツバ付ブッシュB76を回転翼端盤X85のフランジ部を挟んでボルトB74に嵌め、リングナット78でスキを持たせて挟んで締め切った。2個のツバ付ブッシュB76の外周面は、スキを持たせてエンドリング88で挟んだ。エンドリング88はエンドケース77の外側のフランジ部に切られたメネジにねじ込み固定した。
【0173】
要素翼X86の基本断面としては、要素翼X86の軸部分にトルクチューブ89を形成し、それを心金にして射出成形して肉部と外皮を形成した。トルクチューブ89の回転翼盤X72の側はツバ付ボスA79に突き当てた。ツバ付ボスA79とエンドケース77の採用により、軸受で決まる要素翼X86の回転中心とトルクチューブ89の位置をずらすことが容易となった。
【0174】
(4)トルク伝導方式の使い分け方針について、図01、図02、図06、図27を用いて説明する。
歯車列8の中で太陽歯車11から反転歯車16までは歯車を用い、オイル潤滑可能な回転ギアーケース41の中に収める。反転歯車16から同軸に突き出されて取り付けられた反転ピニオン17から要素翼ピニオン18まではタイミングベルトを用いる。アイドラーは無しにしているが、その実用性の確立は将来の技術的な課題である。シャフト駆動とすればアイドラーは不用となるが、その代替案への採用は現段階では見合わせておく。
【0175】
(5)転がり軸受けとスベリ軸受けの方式選定について、図01、図27を用いて説明する。
【0176】
本回転翼は、エンジンからの駆動力を回転力で空気に伝達する機械なので、軸受け方式は主としてラジアル荷重条件と潤滑条件と結合剛性条件を考慮して選定する。伝導系の末端から見ていくと、要素翼6の両端は、高速グリース潤滑と高い結合剛性が必要となるので、それぞれに与圧を掛けた2個ずつのアンギュラー玉軸受で支持する。中間ピニオンA44と同軸の中間ピニオンB45は、高速グリース潤滑と支持剛性が必要となるので、皿バネで与圧を掛けて、両端から1個ずつのアンギュラー玉軸受で挟んで支持する。反転ピニオン17も、高速グリース潤滑と支持剛性が必要となるので、皿バネで与圧を掛けて、両端から1個ずつのアンギュラー玉軸受で挟んで支持する。
【0177】
反転歯車16から従動歯車12までは、オイル潤滑可能な回転ギアーケース41の中で相互の歯車の噛み合いによって支持される。回転翼盤4を支持する取り付け台46の軸受は、高速回転する大荷重を受けるので、強制オイル潤滑されるメタルブッシュA51とする。中央静止翼50の支持軸53は、高速回転する回転翼盤4の中央の穴にメタルブッシュB54を介して支持されて、中央静止翼50に発生する空気力を担って静止状態を保つので、強制オイル潤滑とする。支持軸53は直径が大きくないので軸受のスベリ速度が低いので、レイアウト検討と詳細設計を進めればグリース潤滑の転がり軸受とするスペースも捻出できそうである。その他、設定角度調整のために低速で廻される太陽歯車11や偏心リング割出機構9の中の2つの割出用軸筒部には薄い自己潤滑ブッシュを嵌める。オイルシールやスペーサーについては、今の段階では、必要な部品と部位の想定にとどめる。
【0178】
(6)新設計の偏心リング割出機構について、図01、図02、図12〜図14を用いて説明する。
【0179】
偏心リング割出機構9は、内側偏心ディスク60の外側に外側偏心ディスク61を転がり軸受を介して回動自在に勘着した構造とした。外側偏心ディスク61には内歯歯車とラジアル軸受面が偏心された軸上に形成されている。内歯歯車は、内側偏心ディスク60に偏心して勘着された中継歯車62と噛み合っており、中継歯車62は外側偏心ディスク61を駆動する駆動歯車63の外歯歯車と噛み合っており、駆動歯車63は太陽歯車11の軸筒の外周に回動自在に勘着されている。内側偏心ディスク60は駆動歯車63の軸筒の外周に回動自在に勘着されている。
【0180】
内側偏心ディスク60と外側偏心ディスク61は共に回転ギアーケース41の中に収納されているが、それぞれの軸筒部は機体内側に回転ギアーケース41の穴との隙間でシールされて突き出されている。それらの突出部分に回転変位を与えることにより、偏心量eと偏心角度ηが自在に割出される。
【0181】
(7)中央静止翼について、図01、図05、図19、図20、を用いて説明する。
【0182】
中央静止翼50は、中央静止翼支持軸53を回転翼盤4の中央の穴に挿入され、回転翼盤4によってメタルブッシュB54を介して回動自在に支持されているが、支持ユニット3に係止されているので回転円盤4の回転とは無関係に静止している。中央静止翼支持軸53の機体外側の端部には、機体中央側の円盤58と機体外側の惰円盤59の間に複数の中央静止翼フィン57を挟んで一体化した静止翼ケージ56が結合されている。
【0183】
従って、中央静止翼50は、支持ユニット3との間で角度位置を調節することにより、回転翼盤4の回転とは無関係に静止しており、回転角度位置を変えられる。中央静止翼50を用いると、回転翼盤4の前側の要素翼6から流出する後流れを偏向させて後側の要素翼6に流入させられる。
【0184】
ここで、中央静止翼50の作用について、図30〜図42、図47、図48を用いて説明しておく。ここで、解析と説明の容易のために、回転翼1の要素翼6の枚数は上下前後の4枚とし、翼型はキャンバーなしの対象翼型と仮定しておく。
【0185】
回転翼中心軸48には、要素翼6に発生する空気力の上向き成分の総和として回転翼の揚力が、後向き成分の総和として回転翼の抗力(総和が負の場合は推力)が、要素翼6に発生する空気力に起因する回転モーメントの総和として回転翼6の回転モーメントが発生する。
【0186】
回転翼の揚力は、主として取付け角γを変えることにより増減できる。即ち、前下がりに回転させる回転翼では、上死点の要素翼は、流入風速と回転速度のベクトル和の流入速度ベクトルの気流を受ける。揚力は流入速度の2乗に比例するので、上死点付近では、最も大きな揚力が発生する。上死点の要素翼の取付け角γを負の方向に回転してやると、跳ね上げ工程の要素翼も含めて、全ての要素翼の取付け角γが回転した分だけ大きくなる。
【0187】
回転翼の推力(抗力)は、空気の流入速度と回転速度を一定にした場合、遥動角を変えることにより増減できる。空気力は迎角が20°付近で最大となりその後は失速して急に減少するので、空気の流入速度が上がっていない始動時には遥動角を大きくして、前側の要素翼の迎角を20°付近に保ち、空気力を発生する。その後は空気の流入速度と回転速度の上り方を見て、迎角を20°付近に保ちながら遥動角を戻していく。
【0188】
回転翼の回転モーメントは、図32に模式的に示すように、回転翼を前方から後方に貫流する気流を中央静止翼によって切り返すことで調節できる。ここでは、解析と説明の容易のために、翼の抗力係数は揚力係数と比べて十分小さく無視できるとする。この条件では、上下の要素翼では、発生する空気力は揚力のみとなり、要素翼を回転させる成分がなくなるので、回転モーメントの検討では無視できる。
【0189】
中央静止翼がない場合は、前方の要素翼の後流れは斜め下後方に向いその角度で後方の要素翼に流入すると考える。(実際には迎角の100%が後流れの傾斜角になるのではなく、50%程度のようであるが、今は、基本的な現象の解釈が目的なので、大胆に、100%流れ下ると仮定しておく。)このため後方の要素翼の迎角が小さくなり、前側の要素翼に発生する空気力の揚力成分が後側の要素翼の要素翼に発生する空気力の揚力成分より大きくなる。この前後のアンバランスにより、回転翼の回転中心周りに、要素翼の回転半径をモーメントアームとする大きな回転モーメントが発生する。
【0190】
中央静止翼がある場合は、前方の要素翼の後流れは斜め下後方に向かって流出するが、中央静止翼によって適度に切り返して偏向させて水平方向に戻して後方の要素翼に流入させることができる。このときは、後方の要素翼の迎角は前方の要素翼の迎角と等しくなり、前側の要素翼に発生する空気力の揚力成分が後側の要素翼の要素翼に発生する空気力の揚力成分と等しくなる。そのため、前後のアンバランスが無くなり、回転翼の回転中心周りには回転モーメントが発生しなくなる。
【0191】
中央静止翼によって過度に切り返された場合は、空気は斜め上後方に偏向され後方の要素翼に流入する。このため後方の要素翼の迎角は前方の要素翼の迎角より大きくなり、前側の要素翼に発生する空気力の揚力成分が後側の要素翼の要素翼に発生する空気力の揚力成分より小さくなる。そのため、前後のバランスが逆転し、回転翼の回転中心周りに前下げ方向の回転モーメントが発生する。
【0192】
ただし、揚力、抗力、回転モーメントはいずれも要素翼に発生する空気力に起因しており、空気力が要素翼の回転速度と流入速度のベクトル和の2乗に比例するのでこれらの3成分の大きさは、回転速度を変えると、相互に関連しながら複雑に変化する。
【0193】
(8)外側翼について図21、図26、図29、図33〜図38を用いて説明する。
【0194】
ピッチング回転翼1を用いた飛行機では飛行中に回転翼1に回転モーメントが発生する。要素翼6に発生する揚力に起因する回転モーメントは中央静止翼50を制御することによって小さくできるが、要素翼6に発生する抗力によって発生する回転モーメントは、飛行機90を推進する時の駆動トルクの反力であるから、発生は避けられず、別途、バランスを取らねばならない。この機能を担う機構として、水平尾翼67の外側に外側翼66を設け、ピッチング回転方向の傾斜角を調節して揚力を制御することによりバランスを取る方法を採用した。この機能を、別途、設けることにより、従来の飛行機に準じた機構で水平尾翼67とエレベーター65により、飛行状態に起因するピッチング回転に対する静安定性を確保することが可能になる。
【0195】
設計仕様によっては、外側翼66は、元々別の機能でもあるので、水平尾翼67とは別に、最適な位置を選んで独立して設けることも必要になる。
【0196】
(9)上反り角のつけ方について、図21、図26、図29を用いて説明する。
飛行機90のローリング回転に対する静安定性を確保する機構としては、従来の飛行機に準じて、回転翼1を、機体外側を上げる方向に傾斜させて取り付けて上反り角を確保する設計とした。また、回転翼1の下方に下側静止翼70を付ける場合には、この翼にも上反り角を付ける。
【0197】
(10)ヨーイング回転に対する静安定性について、図21、図26、図29を用いて説明する。
【0198】
飛行機90のヨー回転に対する安定化機構としては、従来の飛行機に準じて、垂直尾翼68とラダー69を設定した。主翼の後退翼については、回転翼1のヨー回転コントロール特性が解明されるまで採用を留保した。ただし、回転翼1の下方に下側静止翼70を付ける場合には、この翼には後退角も付ける。
【0199】
(11)回転翼飛行機の現時点での理想モデルである、遊星歯車を省いた簡易型の回転翼X80を用いた飛行機90について、図26〜図29を用いて説明する。
【0200】
遊星歯車を利用して周期的に遥動を加えることを止め、太陽歯車82と反転歯車83と従動歯車84の単純な平行回転歯車列81とする簡易型の回転翼80を設計した。太陽歯車と従動歯車84の歯数を同じにすれば、反転歯車83の歯数とは無関係に従動歯車は1回転中に1回転戻され平行回転する。偏心リング割出機構9も不要になるので構造は大幅に簡略化される。
【0201】
ただし、この様な飛行機は、特殊で、翼を広げ過ぎて機動的な飛行ができなくなったアホウドリに当たると見ている。しかし、その難点を補う方法が見つかれば、駆動機構は単純に越したことはなく、応用範囲も広がろう。確かに殆ど翼を捻らずに飛んでいる鳥の飛行状態も多々見られるので、今の段階では研究対象からは外せない。
【0202】
次に、本発明の機構を用いて作り出せる飛行モードと、それぞれのモードにおける回転翼の作動について原理的に説明する。
【0203】
飛行機は原理的には使われる飛行モードの全てで安定性と操縦性が成り立つように設計されねばならない。そのためには、飛行中の運動を飛行モードに分解し、それぞれの飛行モードで必要な空気力と回転モーメントを発生し、それらを制御できるように設計されなければならない。しかし、鳥類は同じ飛行機構を持ちながら種類により様々に飛行モードを選んでいる。そこで、今は、基本的に必要な機構を見極める段階なので、基本的な飛行モードを仮定し、それらの飛行モードでの基本的な操作と作動について解析し、本発明の機構の有効性を確認した。図30〜図38、図47、図48を用いて説明する。
【0204】
直線飛行に限定すると、飛行プロセスは、離陸準備、離陸、加速(上昇)、水平、滑空、減速(降下)、着陸、停止に分けられる。助走や堕走をせずに静かに水平に舞い上がるアオサギの飛行プロセスを手本に、車両姿勢は常に水平と仮定し、基本的な飛行モードを、次の4つに整理した。従って、水面で助走や制動をするハクチョウの飛行モードは、応用的な飛行モードと考えて説明を割愛する。
【0205】
(a)地上加/減速モード(離陸準備と停止)
(b)舞い上がり/舞い降りモード(離陸と着陸)
(c)空中加/減速モード(加速と減速)
(d)滑空モード
【0206】
これらの4つのモードについて、以下に説明をする。
【0207】
(a)地上加/減速モードの作動について、図33〜図35を用いて原理的に説明する。
地上では機体が停止しているので、起動時の空気の流入速度はゼロであるが、回転翼の運転によって流入気流は徐々に加速され、舞い上がりに必要な回転速度と流入速度が得られ、駆動系に回転エネルギーが蓄えられる。起動時には、遥動角を最大にして回転翼を回転させ、前方から空気を吸い込み後方に送り出し、その後、遥動角を徐々に戻しながら回転速度を上げ、回転翼を貫流する空気流を加速し、舞い上がりに必要な気流速度と回転速度を確保する。この間、機体は地面に支えられており、踏ん張りが効くので、その範囲内で、大きな回転モーメントが発生しても耐えられる。
【0208】
この間、中央静止翼は後方の要素翼が大きめの負の迎角を取り、背面で空気を送り出すように調節される。即ち、前方の要素翼の斜め後下方向の後流れをそのまま、または、更に、下方に偏向させて後方の要素翼に流入させる。
【0209】
舞い上がりに必要な気流速度と回転速度が得られた状態で、負荷が増大して回転速度が低下した時に駆動トルクを増大して元の速度に戻すフィードバック制御を掛ける。気流速度を低下させないように監視しながら、遥動角を戻して要素翼の迎角を下げて必要な迎角増大マージンを確保し、舞い上がり待機状態とする。
【0210】
舞い降り後は、制動から停止までの間、流入気流の低下に伴う大きな回転モーメントが発生しても、地面に踏ん張って耐えられるので、舞い上がり前と逆の動作で遥動角と回転速度を徐々に戻して停止する。
【0211】
ここで、舞い上がり前に、地上で回転翼を前から後へ貫通する気流を作り出す過程について、図33〜図38の試算を参考にして定性的に推定しておく。これに似た課程はヘリコプターがローターを起動して吹き下し流れを発生するときにも起こされている。
【0212】
取付け角をゼロにし、揺動角を80°にして、低回転速度で前下げ方向で始動回転すると、下死点の要素翼は後方から風を受けるので抗力は前向きに発生するが、迎角が小さいので小さい。上死点の要素翼は前方から風を受け、抗力は後向に発生するが、これも小さい。前方の要素翼は下から風を受けて空気力を発生するが、その上向き成分は小さいが、前向き成分は大きい。後側の要素翼は上から風を受けて空気力を発生するが、その下向き成分は小さいが、前向き成分は迎角を持った要素翼の揚力になるので大きい。即ち、このような条件では、上下と前後の要素翼によって生ずる、回転翼を前上がりに回転させる回転モーメントは小さい。揚力も小さい。しかし、前向きの空気力は大きい。その反力で機体は前方に押されるが、駐機ブレーキを掛けて踏ん張れる範囲であれば前進はしない。その反動で、回転翼は前方から空気を吸い込み後方に押し出す。
【0213】
揺動角を80°にしたまま同じ回転速度で回転を続行すると、上死点と下死点の要素翼には水平方向に僅かな抗力しか発生しない。後方の要素翼は前方の要素翼の起した後流れを受けて空気力を発生するが、流入角が揺動角に等しくなると迎角がゼロになるので空気力の発生はなくなる。その状態になるまでは回転翼を前後に通過する空気の流速は上がり続ける。即ち、この間では、上下と前後の要素翼によって、回転翼を前下げ回転させる回転モーメントと揚力と抗力が過渡的に生ずるが、それらは、大きくはなっていかない。前向きの空気力によって機体は前方に押されるが、回転翼の前方から後方に押し出される空気の流速は、更に加速されて一定値に落ち着く。
【0214】
続いて、揺動角を70°にして同じ回転速度で回転すると、同じ作用が繰り返されて、回転翼の前方から吸い込まれ後方に押し出される空気の流速は、更に加速されて一定値に落ち着く。
【0215】
その後も遥動角を段階的に小さくしていくと前翼と後翼の迎角が小さくなり、流れをそれ以上加速できなくなる。この時の回転翼は揚力型回転ファンとでも言うべき作用で、効率よく、空気を前方から吸い込み後方に押し出している。
【0216】
(b)舞い上がり/舞い降りモードの作動について、図33〜図38を用いて原理的に説明する。
【0217】
舞い上がりには機体重量を支え上昇させる揚力を発生する必要がある。また、空中ではピッチング回転に対する踏ん張りが効かないので、回転翼に発生する回転モーメントは水平尾翼の側端に取り付けた外側翼の調節で制御できる範囲に押さえなければならない。従って、舞い上がりの瞬間には複雑で機敏でデリケートなモード切換え操作が必要となる。
【0218】
舞い上がり待機状態から取付け角を上げて要素翼の迎角を大きくして、回転翼に大きな揚力を発生し、機体を舞い上がらせる。回転速度は、所定の舞い上がり待機速度を基準に調節して、上昇加速度によって変える。
【0219】
この時、中央静止翼は前側の要素翼に発生する空気力と前後対称な空気力を後方の要素翼に発生させるように、大きな正の迎角を取れるように調節する。即ち、前方の要素翼の後流れを切り返して上向きに偏向させて後方の要素翼に流入させる。
【0220】
前後の要素翼に発生する推力は互いに引き合うことになるが、垂直に上昇させるためにはそれらのバランスをとることが必要になる。このバランスは、遥動角と中央静止翼の切り替えし角を同時に変えることで調節できる。
【0221】
後側の要素翼から流出した空気は拡散し、減速しながら、水平尾翼の側端に付けた外側翼に流入するので、その傾斜角の調節によって、回転翼に発生する回転モーメントに起因する機体のピッチング回転が抑制される。
【0222】
上昇後、上昇と前後移動とピッチング回転の3つの速度が全て0になるよう制御することにより空中停止(ホバリング)が可能となる。
【0223】
減速飛行後は、空中停止状態に戻すと、舞い上がりと逆の操作で舞い降りることができる。
【0224】
(c)空中加/減速モードの作動について、図33〜図38を用いて原理的に説明する。
【0225】
空中での加速には揚力を発生して飛行機を空中に支えながら、前向きに推力を発生する必要がある。また、空中ではピッチング回転に対する踏ん張りが効かないので、機体に発生する回転モーメントは水平尾翼とその側端に付けた外側翼の調節で制御できる範囲に押さえなければならない。しかし、飛行機は既に空中に舞い上がっているので、空中加速モードへの移行は、比較的スムーズに行える。
【0226】
飛行機の上昇は、空中停止状態を基準にして、取付け角リードで回転速度、遥動角、中央静止翼の切り返し角と外側翼の傾斜角を互いに関連付けながら調節して揚力を増大することにより可能となる。
【0227】
飛行機を前進させるには、前後の要素翼に発生する推力のバランスを崩して、前側の要素翼の推力を後側の要素翼の反対方向の推力より大きくすることが必要になる。または、後側の要素翼の推力をゼロまたは前向きの推力にすることも、回転モーメントを過大にしない範囲であればできる。これは、遥動角リードで、中央静止翼の切り返し角、回転速度、遥動角、取付け角と外側翼の傾斜角を互いに関連付けながら調節することにより可能となる。
【0228】
この時、要素翼の遥動角は大きめにし、前側の要素翼に発生する空気力を大きくし、推力成分を増大させる。また、中央静止翼は、前側の要素翼の後流を後方の要素翼に迎角がゼロまたは少しマイナスで流入するように調節し、推力のバランスを変えてやる。面白いことに、この時、中央静止翼自身にも前向きに推力が発生する。中央静止翼を回転翼の中心に対して前方に取り付けると、切り返し角を付けた時に前下げ方向の回転モーメントが発生する。この回転モーメントは、回転翼に発生する回転モーメントを相殺する方向であり、利用できる。
【0229】
ただし、推力は、飛行機に発生するピッチング回転モーメントを過大にしない範囲に制御されねばならない。後側の要素翼から流出した空気は拡散し、減速しながら水平尾翼の側端に付けた外側翼に流入するので、そこに発生する揚力を調節することによって、飛行機の駆動に伴って発生するピッチング回転は抑制される。
【0230】
以上により、上昇、前後移動、ピッチング回転の3つの速度を制御しながら空中で加速できる。
【0231】
空中での減速は、上記と逆の動作で制御できる。回転速度を落としてゆくと、推力と揚力が同時に下がってくるが、遥動角を調節して迎角をとり戻して降下速度を調節しながら減速降下できる。または、回転速度を維持または上げながら、迎角を小さくして揚力と抗力を同時に下げて、飛行速度と高度を下げて減速降下することもできる。
【0232】
目標とする飛行速度と高度が得られたら、推力と揚力を水平飛行の維持に必要なレベルにまで下げるように回転速度と遥動角を調節して巡航飛行に移る。翼面荷重を、翼型の性能設計値として無理のない、100kg-w/m2と仮定すると、1m2の翼面積の要素翼を4枚持った回転翼を左右に搭載した回転翼飛行機は、800kg-w程度の揚力を発生できる。
【0233】
(d)滑空モードの作動について、図35、図38を用いて原理的に説明する。
【0234】
滑空中の回転翼の回転速度は、停止からフリー回転の間で、制動により回転速度を変えられる。操作系の電源が生きていれば、回生ブレーキ(ブレーキ発電)を掛けて、回転翼の迎角の制御や機体の姿勢の制御も可能である。回転翼の回転を止めた状態での飛行は、原理的に、複葉飛行機の滑空と同じである。
【0235】
実際に、揚力の大きさ、揚力の作用点、飛行機の重心、水平尾翼の位置、水平尾翼の容量などを調整すると、従来のグライダーに準じた回転翼を固定した滑空状態が設計できる。
【0236】
従来のグライダーでは、主翼で揚力を発生し、エレベーターで機体の姿勢角を制御して滑空する。ピッチング回転に対する静安定性は水平尾翼によって得ている。これに対して、ピッチング回転翼飛行機では、回転翼の要素翼と中央静止翼で揚力を発生し、エレベーターで機体の姿勢角を制御して滑空する。ピッチング回転に対する静安定性は水平尾翼によって得る。
【0237】
要素翼と中央静止翼に発生する空気力によって、回転翼の中心周りに発生する回転モーメントは、水平尾翼の外側にピッチング回転角度位置を調節できるように取り付けられた外側翼に発生する空気力によって相殺されるように制御される。
【0238】
従来の飛行機では、主翼の上反り角によってロール安定性が図られているが、ピッチング回転翼飛行機では、回転翼を傾斜させて取り付けることにより上反り角を得ている。
【0239】
最後に、基本的に往復運動である羽ばたき運動を回転運動に置き換えたために生じたもう一つの設計準備課題として、回転翼の回転方向の問題に触れておく。図43〜図46を用いて説明する。
【0240】
滑空中の回転翼の回転方向については、回転翼のブレーキを解除し、フリーに回転させて滑空させることもできる。この時の回転方向は、中央静止翼の切り返し角を調節することにより、前下がり回転から前上がり回転に切り替えることができ、フリー回転の速度を調節することもできる。
【0241】
フリーに回転する場合は要素翼に発生する空気力が変わり、回転翼の揚力も増大する。オートジャイロやヘリコプターのオートローテーションのような飛行の可能性が期待されるが、鳥の飛行モードにはない現象でもあり、今の初期の机上検討段階ではその可能性は定性的にしか推定できていない。操作方法を選ぶことにより一方向回転にできるか、どのような滑空制御ができるかは、飛行機の安全性と信頼性設計の基本に係るので、当面の最も興味ある研究課題の一つである。
【0242】
本回転翼では、ヘリコプターのように空気を下に押し出してその反動で揚力を得るのでなく、前側から吸い込んだ空気を後斜め下方に偏向させる反動で揚力を得ている。この原理的特長があるので回転翼の下側に下側静止翼を取り付けることが許される。この翼には上反り角や後退角も付けることができるので、滑空時の揚力を増大し、静安定性の向上にも寄与させられる。
【0243】
また、この下側静止翼は、レイアウト上、および、商品性上極めて大きなメリットを生む。即ち、この下側静止翼の中は、従来の飛行機の主軸で実用性が実証されているように、前輪の収納、燃料の搭載、バッテリーの格納などに利用でき、その分、居住空間を拡大できる。また事故時のクラッシュでは衝突エネルギーを大きく吸収させることもできる。
【0244】
回転翼を駆動するトルクと推力の関係を定量的に理解するために、揚力をゼロにして、抗力により発生する空気力と回転モーメントの関係を試算した。一例を図36〜38に示す。
【0245】
なお、本発明に係る回転翼は、以上、説明した実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【産業上の利用可能性】
【0246】
ビジネス開発の観点からは、ピッチング回転翼飛行機は、回転翼だけで揚力と推力の両方を発生し、空中静止も可能な飛行機であるが、従来の飛行機やヘリコプターに代わるものではなく、新しいビジネス分野を切り開く材料となりそうである。
【0247】
ヘリコプターのホバリングでは空気は上から吸い込まれ下に押し出される。これに対して、ピッチング回転翼飛行機のホバリングでは、空気は前から吸い込まれ斜め後下方に吐き出される。この状態は、流れるプールで流れを作りながら泳ぐのに似ている。従って、離着陸時の砂塵の巻き上げ方はヘリコプターと比べてかなり違ったものになる。
【0248】
ヘリコプターは、大きな垂直上昇力と等方向性の水平移動能力という、ピッチング回転翼飛行機には真似のできないリフト能力を持っている。しかし、軽量級の空飛ぶタクシーにすればヘリコプターとは一味違う便利な飛行機となるかも知れない。ヨーコントロールとロールコントロールとジャイロ効果に苦しみながら現在の飛行技術を確立したヘリコプターを思うと、やや複雑ではあるが、鳥に近い飛行原理を持つこの飛行機の実用化は、比較的容易かもしれない。
【0249】
無線操縦のホビー用や作業用飛行ロボットへの応用も有望であろう。この場合は、人が乗らず、使用場所を限定でき、製品安全上や航空法規上の制約も少ないので、制御技術と並行して機構と構造の開発を進めれば商品化の道は早めに開かれるかもしれない。
【0250】
ホビー用としては、従来、弾性膜を張った羽ばたき翼の鳥ロボットが商品化されている。しかし、弾性膜翼では、バタバタして翼型が定まらないので、安定した精度の良い飛行を機械的に再現することは難しいと思われる。本発明は剛性のある複数の要素翼を機械的に回転させ、少し多めの補助翼を用いて操作する機構となっているため、制御ファクターが多く、しかもそれらを複雑に関連付けて操作しなければならない。それをシミュレートしてマイコンを開発してゆくのはかなり難しいタスクとなるが、克服されれば、鳥のように自由に飛行させられる模型飛行機が多様に開発されるようになる。
【0251】
商品開発の観点からは、設定目標の有人鳥ロボットの実用化までには最短で20年は掛かる。基礎設計は、自動車を基準に、安全、重量とコスト、燃費とエミッション、騒音性能、デザインについて性能目標を設定して開発を進めることになろう。オートローテーション機能とその制御能力が安全性のカギを握っている。重量は半減したい。ボディー系の強度メンバーは全て高張力アルミ板にし、ボディーパネルは全て樹脂化し、シャシー系のメンバーはCFRP 主体にする。軟構造化を進め、動的挙動を解析し、弾性変形や振動特性を設計に確りと織り込むことになる。コストは2倍以下に押さえたい。最近の自動車のエコ対応への挑戦は先行技術開発として大いに期待できる。排気騒音の点からジェットエンジンは使えない。エンジンは、最初はバイオ燃料のロータリーハイブリッドとなるのかもしれない。それまでには、ロータリーエンジンのローターとエキセントリックシャフトは中空かセラミックにしたい。タイヤ音は無くなるが、風切り音が発生する。しかし、翼型も機体形状もどこまでも鳥に近づけていけるので空力性能の向上を図りながら風切り音は低減してゆける。外観デザインとしては、鳥をイメージしたコンパクトで美しい形が原理的に約束されている。
【0252】
ピッチング回転翼飛行機は僅かな助走で離陸し、そのまま飛行状態に入ることができる。従って、将来は、ピッチングコントロールの難しさを克服し、回転翼の制御方法を確立し、機体の静安定と操縦性を確立し、離陸準備、急速上昇、水平飛行、旋回、滑空、制動などの飛行モードをスムーズに切り換えて飛行し、精度良くピンポイントで着陸できるようにしたい。
【0253】
本発明は、今は、ヘリコプターに近い水平維持飛行をする飛行機としているが、鳥や従来の飛行機のように飛行方向に機首を向け、違和感なく自然なフィーリングで加速度を感じて飛行することが可能となるように配慮して機構の設計を進めている。鳥は空中で空気力と重力と慣性力のバランスを取りながら姿勢角を自由に変えて飛行しているが、将来は、鳥ロボットの胸に乗り込んだドライバーが人鳥一体となって自由に姿勢を変えて自在に操縦できるようにしたい。
【0254】
技術開発の観点からは、ピッチング回転翼を用いた飛行機の開発は、まだ、設計原理を解明し設計理論を準備している段階である。次の段階では、ラジコン名人達に教えてもらってオリジナルラジコン模型の開発を楽しみながら、操縦システムの基本設計にすすみたい。これまでに分かった機能・性能・構造要件とレイアウト要件を踏まえて、遥動機構を省略または簡略化した単純な平行回転翼を試作し、フリー滑空させてみることから着手したい。
【0255】
遊星歯車を用いた差動機構により要素翼を周期的に遥動させる機構は、自動車で言えば、駆動系のディファレンシャルギヤーを利用した動力配分技術に相当する。それに対して、中央静止翼と外側翼を用いて回転翼に発生する回転モーメントをバランスさせて機体のピッチング回転の静安定性を確保しようとする機構は、シャシー系のサスペンション技術に相当しよう。次の段階では操縦システムの原理設計に進むが、ローリング回転とヨーイング回転に対する静安定性を確保するための機構の確認が先となろう。シャシー系のステアリング、タイヤ、ダンパーに相当する技術領域が、未だ発明されずに残されていると感じているが、それはまだ見えていない。そこまでゆければボディーの原理構造も見えてこよう。従って、自動車のエンジン、ボディー(艤装、内外装を含む)に相当する技術領域については、今はまだ絵に描いた餅の状態である。
【0256】
偏心リング割出機構と遊星歯車を用いた偏心-遥動変換機構はかなり複雑になったが、今のところ比較すべき代替案は見つかっていない。ヘリコプターのスワッシュプレートに相当する機構なので、信頼性の確保には多くの困難が予想されるので機体や回転翼とは別にユニットレベルのプロジェクトを立てて開発を進めたい。
【0257】
回転ドラムケース内のオイル潤滑システムの設計は、具体的に試作テストでドライ潤滑の限界を見極めながら進めるべきであろう。また、将来、実用化される段階では、オイル潤滑を必要とする高性能飛行機とは別に、オイル潤滑を必要としない回転翼飛行機の開発も進めるべきである。ドライ潤滑の回転翼の開発は、実用性の高い量産機の範囲を広げるので、実用上最も価値ある技術開発テーマの一つである。
【0258】
要素翼を駆動するベルトやチェーンには、現在の通常の技術では張りを調整する機構が必要である。しかし、回転するディスクに組み込むので、この機構は不要にしたい。このテーマは、将来、材料技術と製造技術の革新でブレークスルーすべき、当面、見通しを得たい最優先の技術開発課題の一つである。
【符号の説明】
【0259】
1 回転翼
2 回転ユニット
3 支持ユニット
4 回転翼盤
5 回転翼端盤
6 要素翼
7 要素翼軸
8 歯車列
9 偏心リング割出機構
10 ボディー
11 太陽歯車
12 従動歯車
13 内歯歯車
14 リテーナリング
15 遊星歯車
16 反転歯車
17 反転ピニオン
18 翼ピニオン
19 遊星歯車ジョイントピン
20 偏心リング
21 ローラーアーム
22 ジョイントピン
23 ローラー
24 偏心-遥動変換機構
25 差動機構
26 太陽歯車軸
27 ランナーリング
28 追従要素翼
29 タイミングベルト
30 内側用アンギュラー玉軸受
31 外側用アンギュラー玉軸受
32 通しボルト
33 ボルト
34 タングA
35 ツバ付ボス
36 リングナット
37 エンドケース
38 エンドリング
39 トルクチューブ
40 タングB
41 回転ギアーケース
42 タイミングベルトA
43 タイミングベルトB
44 中間ピニオンA
45 中間ピニオンB
46 取り付け台
47 要素翼ケージ
48 回転翼中心軸
49 スラストパッキン
50 中央静止翼
51 メタルブッシュA
52 メタルブッシュC
53 中央静止翼支持軸
54 メタルブッシュB
55 メタルブッシュD
56 静止翼ケージ
57 中央静止翼フィン
58 円盤
59 楕円盤
60 内側偏心ディスク
61 外側偏心ディスク
62 中継歯車
63 駆動歯車
64 偏心ディスク転がり軸受
65 エレベーター
66 外側翼
67 水平尾翼
68 垂直尾翼
69 ラダー
70 下側静止翼
71 下側静止翼エキステンション
72 回転翼盤X
73 通しボルトA
74 ボルトB
75 ツバ付ブッシュA
76 ツバ付ブッシュB
77 エンドケース
78 リングナット
79 ツバ付ボスA
80 回転翼X
81 歯車列X
82 太陽歯車X
83 反転歯車X
84 従動歯車X
85 回転翼端盤X
86 要素翼X
87 トルクチューブ
88 エンドリング
89 機体
90 飛行機
e 偏心量
η 偏心角度
α 要素翼の傾斜角
β 偏心軸傾斜角
γ 取付け角
δ 要素翼の遥動角
ζ リテーナリングの遥動角
Vt 飛行速度
Vr 要素翼の公転速度
θ 要素翼の公転角度
【技術分野】
【0001】
本発明は、平行回転翼を利用した流体機械に関するものである。
【背景技術】
【0002】
人類は、鳥の飛行術の研究から舞い上がりを得意とするヘリコプターと滑空を得意とする飛行機を実用化してきたが、鳥のように舞い上がり、そのまま滑空に移れる飛行機はまだ実用化されていない。
【0003】
鳥類と哺乳類は共に爬虫類から進化したため骨格が良く似ているが、鳥類は省ける機能を徹底的に退化させながら飛ぶための機能を高度に、且つ、多様に進化させてきた。
【0004】
実際、鳥の持つ機構には飛ぶために進化させたと思われる哺乳類との違いが多く見られる。特に、羽根でできた翼を羽ばたく機構は自然が作り出した最高傑作の一つであるが、かなり複雑である。従って、鳥をあるがままに模擬してゆくと、その飛行機は限りなく複雑な機構になってしまう。
【0005】
一方、人類は哺乳類を模擬して自動車を実用化してきたが、手に負えない程の複雑さにはなっていない。従って、同じように爬虫類から進化した鳥を模擬した飛行機が、自動車と比較できないほど複雑な機械になってしまうとも考えにくい。
【0006】
やや複雑になっても構わないから、鳥の羽ばたき機構をもう少し忠実に模擬できないであろうか。ライト兄弟の発明から100年以上経過し、コンピューターが目覚しい発達を遂げ、流体力学が十分に実用的に利用できる現代に立って、将来を展望すれば、その試みは、無謀とは思われない。
【0007】
ヘリコプターは上下軸の周りに複数の翼を回転させているが、この方式は鳥には見られない。しかし、複数の翼を左右軸の周りにほぼ平行を保ったまま回転させる方式は鳥の羽ばたき運動を近似的に模擬できている。
【0008】
以下、上下に羽ばたく翼の動きを、近似的に平行回転する円運動に置き換え、工程を複数に分解して円周上に配置し、同時に回転させる回転翼の方式を、本特許願いでは、平行回転翼、ピッチング回転翼、平行ピッチング回転翼、または、単に回転翼と呼ぶ。
【0009】
平行回転翼の原理は、特許文献2に示すように、既に、34年前の1975年に、フランスで特許出願されている。平行回転、遥動付加、偏心-遥動変換、偏心リング割出しの4つの機構を組み合わせて、複数の要素翼を周期的な遥動を加えながら平行回転させるアイデアは本発明と同じであったが、実用化検討は十分でなく、原理の提案に留まっていた。
【0010】
1991年には、このアイデアの回転翼を用いた飛行機の特許が、特許文献3に示すように、同じくフランス人によって日本に外国出願されている。この飛行機は実際に試作されたが、機体のピッチング回転がコントロールできず、試験飛行に失敗したと聞いている。
【0011】
平行回転翼の原理は、潮流発電機/送水機、風力発電機/送風機、水中回転翼船、水上回転翼船、水面滑空機、飛行機など、様々な流体機械に応用できるが、その中で技術的に最も困難な応用分野は飛行機であろう。そこで、本発明活動では、困難な技術課題を早めに見つけ出すために、応用目標を飛行機に設定した。従って、以下の記述は、飛行機への応用の形をとって進める。
【0012】
また、図面視野としては、左側面図を基本とする。回転する要素翼の回転翼上の角度位置については上向き垂直線をゼロとし、前下げ回転方向を正に定義する。また、要素翼の迎角については、流入気流に向う線をゼロとし、翼弦が右回転方向に傾斜する角度を正と定義する。左側面図と要素翼の回転翼上の角度位置と迎角の定義を図30に示す。
【0013】
特許文献1の発明は、2007年に出願されているが、連続している羽ばたき運動の工程を複数の要素翼の状態に分散し、それらを円筒面の稜線上に配置し、基本的に平行回転させながら、それぞれの要素翼の迎角を周期的に遥動させて、鳥の羽ばたき機構をやや複雑なままに、近似的に模擬している。
【0014】
そして、いくつかの飛行条件においては、要素翼に、負の迎角や過大な迎角が生じることを示し、その処理方法について原理的な解決策を提案していた。しかし、この発明を利用するためには、更に、実用化のための課題を明らかにし、解決策を見出す必要があった。
【0015】
渡り鳥の水平飛行では、鳥は翼面と流入気流との交角である迎角を制御しながら翼を上下に動かすことにより、飛行に必要な空気力を得ている。運動工程としては、推力と揚力を同時に発生しながら翼を下死点に向かって打ち下ろす工程と、揚力低下を防ぎながら翼を上死点に跳ね上げる工程が繰り返えされている。羽ばたき飛行中の翼に入る空気の流入角の変化を説明する模式図を、図50、図51、図52に示す。
【0016】
この時、翼の外側の部分(以下、「手の部分」と呼ぶ)では主に推力を、内側の部分(以下、「腕の部分」と呼ぶ)では主に揚力を発生している。従って、羽ばたき運動の模擬には、一つの翼の中で手と腕をどのように動かして揚力と推力を発生しているかの理解が必要となる。翼の構成と骨格の模式図を、図49に示す。
【0017】
また、特許文献1では、機体のピッチング回転モーメントをゼロにする方法として、回転翼の前後位置を機体重心に対して移動させるアイデアが提案されていた。しかし、この方法は、多くの鳥に用いられているとは言え、機械にした場合は大きな質量を迅速に移動させることが必要になるため、制御技術上大きな困難が予想された。そこで、これに代わる回転モーメントの相殺方法の発明が必要となった。
【0018】
平行回転翼を用いた飛行機では、円筒面の稜線上に配置された複数の要素翼に発生する空気力の総和として、回転翼の中心軸に、揚力、推力、回転モーメントの3つが発生するが、これらは相互に密接に関係しているので、調整を取りながら制御する必要がある。
【0019】
水平飛行時には、揚力に対しては取付け角が、推力に対しては遥動角がそれぞれ主導的な制御ファクターであるが、回転モーメントについては、特許文献1の中では、主導的な制御ファクターは明らかにされていなかった。
【0020】
特許文献1の回転翼は、歯車とローラーを用いたやや複雑な機構となっているが、その実用化のためには、レイアウトを見直し、要素翼の剛性とその両端の結合剛性を高め、要素翼の本数を増加し、最大遥動角を拡大し、オイル潤滑を可能にする必要があった。
【0021】
特に、4節リンク機構を用いて回転に同期した揺動回転を付加する機構における、偏心リングとローラーの接触面の倒れの防止と潤滑の方法は、重要な検討課題であった。
【0022】
一方、飛行機としては、従来の飛行機に倣って水平尾翼と垂直尾翼を備え、主翼を回転翼に代えていたが、飛行時の静安定性についての検討は十分ではなかった。
【0023】
そこで、回転翼に発生する回転モーメントと機体のピッチング回転との関係を踏まえて、機体のピッチング回転に対する静安定性を確保する方法について再確認する必要があった。
【0024】
鳥は色々な飛行モードを選び、飛行しているが、鳥の直線飛行メカニズムを模擬するために、離陸準備から、離陸、加速上昇、水平飛行、滑空、減速降下、着地、停止にいたる種々の飛行モードについて、動作を観察し、理解する必要があった。
【0025】
タカは空中で獲物を捕まえられる強い足を持っており、地上でも確りと踏ん張れる。木の枝から飛び出す時には、枝を足で確り握っておき、大きく翼を立てて跳ね上げて、翼の上面で空気を後方に煽り出して、前方から補給される空気の流れに乗って翼を前に出しながら打ち下し、枝を蹴って前方に飛び出し、その後、強く羽ばたいて加速する。
【0026】
アオサギは、翼を水平に広げたまま、長い足を折って斜め前上方にジャンプして飛び出し、直ぐに翼を打ち下して、水平を保ちながら、ハタハタと羽ばたいて加速する。
【0027】
ハクチョウは助走しながら離水する。揚力は飛行速度の2乗に比例するが、水掻きで水面を蹴って助走して加速し、離水に必要な速度を得ている。
【0028】
キジは草むらの中から突然に羽ばたきながら走り出し、助走して舞い上がる。
【0029】
また、コウノトリは、舞い上がる時に、足を踏ん張り、翼を大きく後に傾けたまま跳ね上げて後方向に気流を起こし、次に、その翼を前に回して、前方から補給される気流に乗るように前方に動かしながらジャンプし、続けて翼を打ち下して、離陸に必要な揚力と推力を発生しているように見える。離陸の瞬間には大きな回転モーメントを発生しているが、地上に足をつけている間は、踏ん張って、その回転モーメントに耐えていると推察される。
【0030】
アオサギは、水平羽ばたき飛行中に翼の傾斜角を大きく変化させているようには見えない。しかし、図53に示すように、跳ね上げ工程では、手の部分の風切り羽根を弾性的に捻り、羽根と羽根の隙間を広げて空気を逃がして、実際の翼の迎角は大きく変化させているものと思われる。
【0031】
ナベヅルの水平飛行を観察すると、図54に示すように、跳ね上げ工程では、翼を上凸に折って、下向きの空気抵抗を減らしている。
【0032】
タカは、目的によって、速い羽ばたき、強い羽ばたき、滑空などの飛行モードを臨機応変に選んでいる。さすがは空の王者である。足に重い獲物を鷲掴みにして飛行するときは、翼を一段と大きく捻って羽ばたいている。回転翼を用いた飛行機でも、積載重量や積載位置が変化するときは、空気力、回転モーメント、慣性力、慣性モーメント、重力、機体の空気抵抗などの関係を調節して、ピッチング回転モーメントのバランスをとって飛行姿勢を保つ必要がある。
【0033】
トンビは、獲物搬送の時は大きく翼を捻って一段と大きく羽ばたいているが、毎分の羽ばたき回数は変えていないように見える。
【0034】
ハトは、突風に煽られたり、急制動を掛けたり、天敵の攻撃をかわすために急降下するときなどには、翼を前後に移動させて、重心と揚力中心の距離を変えて姿勢角を大きく崩している。このような挙動では、飛行機であれば乗員は乗っていられない。しかし、事故時の安定性と安全性の設計には十分に参考にすべき現象であろう。
【0035】
タカは、目標までの距離を読んでと気流と高度と速度を選びながら、翼を止めたまま滑空して着地点を目指す。
【0036】
トンビは上昇気流を見つけて旋回上昇し、得られた位置エネルギーを速度に変換して滑空しながら次の上昇気流のある位置に移動する。それを繰り返して、殆ど羽ばたきせずに大空を渡ってゆく。
【0037】
カラスは、電柱に止まる時には、少し下からアプローチし、直前で翼を前に移動して体を起こし飛行方向を上向きにして速度エネルギーを位置エネルギーに変換して、狙ったポイントに速度をゼロにして止まる。
【0038】
ハクチョウは、着水の際には水掻きを水上スキーにして体重を支えながらブレーキをかけて停止する。その際、翼を立てて制動パラシュートにして大きな抗力を発生し、体が前に倒れるのを防いでいる。水が空気に比べて1000倍の密度をもつので、小さな水掻きでも、体を浮かせ急制動がかけられる。
【0039】
ライト兄弟は、グライダーを用いて、空気力、静安定性、操縦性などの実験を先行させ、追いかけて、別途開発していたエンジンを搭載し、飛行機を試作し、初飛行に漕ぎ着けた。
【0040】
回転翼を応用した飛行機の実用化も同じような経緯をたどると思われる。先ずは、静止翼のグライダーからはじめて、フリー回転翼のグライダー、モーター駆動の回転翼飛行機、ラジコン制御の電動回転翼飛行機へと検証項目を追加しながら試作を重ね、滑空、水平飛行、離陸、着陸などの飛行能力を開発していくことになろう。その間には、多くのシミュレーション、設計、試作、実験を積み重ねることになろう。
【0041】
鳥は、生活環境に合わせてそれぞれに最適な特性を持つように、様々な種を多様に進化させてきた。それを思うと、鳥の羽ばたき機構を模擬する飛行機の開発においても、模型試作の段階では汎用性のある飛行機を目指すが、実機試作の段階では、それぞれに特徴を持った個別最適設計の飛行機の開発に方針を切り替えるのが成功への早道になると考える。
【0042】
しかし、そのためには、様々な個別最適設計に利用できる、ユニバーサルでフレキシブルなシミュレーションプログラムの開発が必要となろう。
【0043】
飛行機のコンピューター制御技術は、既に、十分に発達している。しかし、それを利用するためには、飛行状態を司る回転翼の制御ファクターを明らかにし、それらを機体の制御ファクターと、更に、飛行機の操縦ファクターと関係付けていく必要がある。
【0044】
特許文献1の発明では、偏心リングにより与えられた偏心量を遥動回転に変換して要素翼の迎角を周期的に変えている。しかし、これだけでは、打ち下し工程の傾斜角と跳ね上げ工程の傾斜角を、大きさが等しく方向が反対にするところまでしか制御できない。
【0045】
また、回転翼の後方の要素翼は、前方の要素翼が作る後流れの影響を受けるため、遥動角をゼロにしておいても、前方の要素翼と同じ迎角をとって同じ揚力を発生することはできず、回転翼に回転モーメントを発生させてしまう。この現象は実際の鳥にはなく、回転翼にして、打ち下し工程と跳ね上げ工程を前後にずらせたことによって発生しているので、何らかの方法により技術的に解決しなければならない。従って、特許文献1の複数の要素翼のみからなる回転翼では、大きな水平尾翼をつけないと回転翼に生ずる回転モーメントを相殺して静安定性を確保することは困難であり、渡り鳥のような小さめの水平尾翼ではピッチング回転のバランスをとって飛行することはできない。
【0046】
鳥は、腕の部分と手の部分とでは羽ばたき速度に違いが生じ、捻らなくても迎角が変わる。また、肩の関節や手首の関節で捻りを加えることもできる。鳥は、これらの作用を利用して、跳ね上げ工程と打ち下し工程で、それぞれに腕と手の部分の傾斜角を最適化な迎角となるように調節し、過大な回転モーメントの発生を防止しながら必要な揚力と推力を確保していると思われる。図50〜図52に、羽ばたきと回転翼の間の流入気流ベクトルの違いを模式的に示す。
【0047】
以上を踏まえると、色々な飛行モードに切り換えて鳥のように飛行するためには、一部に、鳥には無い新しい工夫も加える必要がある。鳥の持つ飛行の仕掛けを完全に模擬することはできないが、少し複雑になっても、鳥の主要な飛行モードをカバーできるところまでは模擬する必要がある。そこまで進められれば、次の実用化段階では、個別の応用形態に合わせて、鳥に習って不要な機能は退化させ、必要な機能もできるだけ簡素化し、特別に必要な機能を付加または進化させて、多様な鳥ロボットの開発への道が開かれると展望する。
【先行技術文献】
【特許文献】
【0048】
【特許文献1】特開2009−23417 公報
【特許文献2】仏国特許出願公開第2309401号明細書
【特許文献3】特開平3−57796 公報
【発明の概要】
【発明が解決しようとする課題】
【0049】
上記の背景を踏まえて、特許文献1の発明をベースにして、回転翼の飛行機への応用をリードケースにして鳥の羽ばたき機構の実用的な模擬方法を見つけ出し、必須な機能を見極め、機構や構造を設計するための課題を明らかにした。
【0050】
特許文献1の発明では、鳥の羽ばたき運動を、周期的に遥動しながら基本的に平行回転する複数の要素翼の運動に置き換え、平行回転、遥動付加、偏心-遥動変換、偏心リング割出しの4つの機構の組み合わせによって模擬している。
【0051】
回転翼に発生する空気力の大きさは回転速度の2乗に比例するため、必要な回転速度を確保しなければならないが、回転速度の上限は回転体の1次固有振動数で決まるため、軽量で高い要素翼剛性と高い結合剛性を持った要素翼ケージ構造として実用的な回転速度を有する回転翼の構造にする必要があった。
【0052】
また、回転翼に発生する空気力を効率よく発生させるためには、要素翼の本数を増やして細くし、要素翼のアスペクト比を大きくするために、より多くの要素翼を駆動できる、コンパクトで実用的な回転翼の機構にする必要があった。
【0053】
また、内部機構の運転の信頼性を確保しながら回転翼を高速で回転するために、偏心リングとローラーとの接触部分や遊星歯車機構を含む歯車列のオイル潤滑を可能にする実用的な回転翼の構造を提供する必要があった。
【0054】
文献1の発明では、いくつかの運転条件において、回転翼の中心周りに大きな回転モーメントが発生することが予測されていたが、それを打ち消す方法として、回転翼の位置を機体重心に対して前後に移動させるアイデアが提案されていた。しかし、翼の前後移動は鳥が用いている常套手段ではあるが、回転翼を利用した飛行機にした場合は大きな質量の迅速な移動が必要となる。従って、この方式を飛行機の姿勢制御メカニズムに取り入れることはかなり難しいことが分かってきた。
【0055】
そこで、回転翼の前後移動に代えて、回転翼に発生する回転モーメントを回転翼の中で小さくし、調節する方法を発明する必要に迫られた。
【0056】
即ち、本発明には、特許文献1の発明を踏まえて、飛行機に利用でき、近似的に、鳥の羽ばたき運動を模擬しながら、回転翼の中に組入れて、その中心軸に発生する回転モーメントを飛行機のピッチング回転の制御を害さない程度に小さくするための実用的な回転翼の機構を発明する必要があった。
【0057】
発想の手掛かりに鳥のピッチング回転制御方法を観察してみると、鳥は、肩と腕と手での捻りを利用して、腕と手の両部分の捻り角度を調節していた。そして、羽ばたき半径の違いから生ずる手の部分と腕の部分の羽ばたき速度の違いを利用して、翼に入る空気の流入角を変えていた。図49〜図52を見よ。
【0058】
本発明の回転翼の機構に鳥の機構をそのまま組み込むことは、実用的には極めて困難である。その代わりに前方の要素翼の後流れを切り返して、空気の流れを偏向させて後方の要素翼に流入させる方式であれば実用的であり、機能上も代替え手段として有効と推定された。そこで、その可能性を、離陸準備から、離陸、加速、上昇、水平飛行、減速、降下、着陸、停止に至る全ての直線飛行モードについて検証し、回転翼を通過する空気の流れを制御する機構を発明する必要が生じた。
【0059】
そこで、回転翼の中央部付近に要素翼と同じ程度の長さで機体の外側に突き出した静止翼を設け、その静止翼で前側要素翼の後流を偏向させて後側要素翼に流し込めるようにし、しかもその偏向の度合いを調節できるようにするアイデアが生まれ、その実用性の検証が必要となった。
【0060】
一方、飛行機には、飛行条件の急変や飛行モードの変化に対応して、自律的に姿勢角を立て直し、適正に保つ機構が備わっていなければならない。
【0061】
しかし、文献1の発明では、飛行機の基礎的要件である飛行時の静安定性についての検討は十分ではなかった。
【0062】
即ち、回転翼ユニットを左右に取り付けた飛行機で、従来の飛行機に順ずるピッチング、ローリング、ヨーイング回転に対する静安定性が確保できるかどうかの検討は十分ではなかった。
【0063】
従来の飛行機は、基本的には、主翼とエルロン、水平尾翼とエレベーター、垂直尾翼とラダーで静的安定性を確保している。それに対して、本発明の飛行機は、主翼とエルロンに代えて回転翼を採用しているが、特に、ピッチング回転に対する静安定性を確保するためには、回転翼の運転中に推力と揚力と回転モーメントが複雑に関連して変化するため、従来の飛行機にはない特別な制御上の工夫が必要となると予想されていた。
【0064】
そこで、本発明では、特許文献1の発明を踏まえて、従来の飛行機の主翼とエルロンに代えて回転翼を組み込んだ飛行機の状態で、従来の飛行機に順ずる静安定性を成立たせるための新たな機構を発明する必要があった。
【0065】
即ち、本発明には、飛行中に、回転翼に発生する3次元の回転モーメントを抑えて、飛行機のピッチング、ローリング、ヨーイング回転に対する静安定性を確保するための実用的な飛行機の機構を提供する必要があった。
【0066】
具体的には、鳥や従来の飛行機に用いられている静安定化機構を調べ、回転翼に応用できそうな機構の原理を探り出し、実用性を検討した。
【0067】
機体のピッチング回転に対しては、従来の飛行機の水平尾翼とエレベーターに加えて、推力を発生するための回転翼の駆動に起因して回転翼中心軸に発生する回転モーメントによる機体のピッチング回転を打ち消す機能が必要なことが分かった。
【0068】
機体のローリング回転に対しては、回転翼全体を傾けて取り付けて上反り角を付けることが検討された。また、回転翼の下側に上反り角を持った補助静止翼をつけることも検討された。
【0069】
機体のヨーイング回転に対しては、従来の飛行機に準じて垂直尾翼とラダーを付けた。また、エルロンの機能は、回転翼の機能に含まれていると考えられたので、別にエルロンは付けなかった。また、回転翼の下側に上反り角を持った補助静止翼をつける場合は、それにも後退角を付けることが検討された。
【課題を解決するための手段】
【0070】
本発明は、上記課題を解決するために、特許文献1の発明をベースにして、機能を展開し、構造と機構の具体化を図ったものである。
【0071】
請求項1に記載の発明では、機体外側の端に内歯歯形を形成した翼ピニオンの穴に、機体内側から挿入した通しボルトを、機体内側の端に翼ピニオンの内歯歯形と回動不能にスキマ勘合する外歯歯形を形成し、機体外側の端に扁平な突起部分を持つ要素翼軸を貫通させ、更に、要素翼の心金を形成する中空長穴断面を有する管であるトルクチューブを貫通させ、機体内側の端にトルクチューブに勘合する扁平な突起部分を持ち、機体外側の端にベアリングの外輪を勘合させる穴を形成したエンドケースの機体内側の端に形成されたメネジ部に締結して一体化する結合構造とし、軽量で高い要素翼剛性と高い結合剛性を持った要素翼ケージ構造として実用的な回転速度を有する回転翼の構造とした。
【0072】
請求項2に記載の発明では、円筒面の稜線を回転軸とする複数の要素翼軸を回転翼盤上に配置した回転ユニットを支持ユニットの筒部に回動自在に勘着した回転翼において、それぞれの要素翼軸が、支持ユニットに連結されて静止している太陽歯車の周りを、太陽歯車と噛み合いそれぞれの要素翼軸に回転角度を伝達する歯車列によって、公転しながら同じ回転角度自転して戻るようにした平行回転翼において、支持ユニットの筒部の外筒側に太陽歯車と偏心リングを割出す機構を勘着し、筒部の内筒側に、太陽歯車と噛み合う複数の歯車列を取り付けた回転翼盤を回動自在に勘着し、各歯車列の中の複数の遊星歯車を回動自在に勘着したリテーナリングから突出されたアーム部分の先端部にジョイントピンで回動自在に勘着されたローラーを偏心リングの内筒面に接触させて、太陽歯車の中心と偏心リングの中心とローラーの中心とリテーナリングの中心とで4節リンクを形成し、回転翼盤の回転に伴って発生するリテーナリングの遥動回転を遊星歯車の遥動回転に変換し、歯車列の中で末端の翼ピニオンの遥動回転に変換し、回転円盤が1回転する間に1回転戻る翼ピニオンの回転に遥動回転を付加する機構を設け、より多くの要素翼を駆動できる、コンパクトで実用的な回転翼の機構とした。
【0073】
請求項3に記載の発明では、外歯歯車を持った駆動歯車を太陽歯車軸に勘合させ、その外歯歯車と噛み合う中継歯車をオフセットさせて回動自在に勘着し、外周にオフセットした軸受軸面を形成した内側偏心ディスクを勘着し、中継歯車と噛み合う内歯歯車を持ち、外筒部に偏心リングを形成した外側偏心ディスクを内側偏心ディスクの軸受軸面と回動自在に結合する軸受穴面に勘着させた偏心リング割出機構とし、内側偏心ディスクと駆動歯車の軸筒をそれぞれに回転させることにより偏心リングの偏心方向と偏心量を任意に割出せる機構を設け、回転翼の回転ギアーケースに内包し、太陽歯車の外周面との間から機体内側に突き出したことにより、偏心リングとローラーとの接触部分や遊星歯車機構を含む歯車列のオイル潤滑を可能にする実用的な回転翼の構造とした。
【0074】
請求項4に記載の発明では、偏心リングの内径側に、偏心リングの内径からローラーの外径の2倍を差し引いた外径を持ったランナーリングを、スベリ隙間を持たせて回動自在に勘着したことにより、コンパクトな構造でローラーと偏心リングの接触状態の保持と潤滑を確実にし、偏心リングとローラーとの接触部分や遊星歯車機構を含む歯車列のオイル潤滑を可能にする実用的な回転翼の構造とした。
【0075】
請求項5に記載の発明では、太陽歯車と噛み合う歯車列によって駆動されて回転する要素翼に加えて、それらの要素翼と連結されて回転する追従要素翼を追加して要素翼の枚数を増やした回転翼を取付けたことにより、より多くの要素翼を駆動できる、コンパクトで実用的な回転翼の機構を、必要に応じて選択できるように用意した。
【0076】
請求項6に記載の発明では、支持ユニットの筒部の穴に回動自在に勘着された回転翼盤の中心の穴に回動自在に勘着された中央静止翼の軸筒の機体外側の端に、内盤と外盤の間に要素翼とほぼ同じ長さの翼を挟んで一体化した静止翼ケージを固定し、軸筒の機体内側の端を回転させて回転角度位置を調節できる中央静止翼を設けたことにより、回転翼の中に組入れて、その中心軸に発生する回転モーメントを飛行機のピッチング回転の制御を害さない程度に小さくするための実用的な回転翼の機構とした。
【0077】
請求項7に記載の発明では、水平尾翼の機体外側の端に機体内側に向けて明けられた穴に、軸部を回動自在に勘着した外側翼を設け、機体内側から水平尾翼の内部を貫通して連結棒された連結棒の操作によりピッチング回転位置を調節し、飛行中に、回転翼に発生する3次元の回転モーメントを抑えて、飛行機のピッチング、ローリング、ヨーイング回転に対する静安定性を確保するための実用的な飛行機の機構とした。
【0078】
請求項8に記載の発明では、静止翼を回転翼の下方に機体から外側に突き出して装着し、ローリング回転とヨーイング回転に対する静安定を得るために、上反り角と後退角を付けられるようにし、飛行中に、回転翼に発生する3次元の回転モーメントを抑えて、飛行機のピッチング、ローリング、ヨーイング回転に対する静安定性を確保するための実用的な飛行機の機構とした。
【発明の効果】
【0079】
請求項1に記載の発明に関しては、トルクチューブにより要素翼単体の曲げ/捻り剛性を確保した。両端の結合部品である要素翼軸とエンドケースに形成された扁平な突起部分の挿入と、要素翼軸の外歯歯形を翼ピニオンの内歯歯形に回動不能に勘合することにより回転位置を合わせて廻り止めを図った。エンドケースは、翼ピニオンの内側から挿入され要素翼軸と要素翼のトルクチューブを貫通した通しボルトを、そのメネジ部で引き付け、要素翼の軸系を一体化し、曲げ/捻り剛性を高めた。エンドケースの外側のベアリングケースには与圧を掛けた2個のベアリングが装着され、回転翼端盤と要素翼との間に回転自在に高い結合剛性が得られた。このような手段により、軽量で高い要素翼剛性と高い結合剛性を持った要素翼ケージ構造として実用的な回転速度を有する回転翼の構造が提供された。
【0080】
請求項2に記載の発明に関しては、偏心リングを拡大し、リテーナリングとローラーアームを一体にし、アーム先端に1個のローラーを回動自在に取り付け、偏心リングの内筒面に当てて回転するようにしたことにより、より多くの要素翼を駆動できる、コンパクトで実用的な回転翼の機構が提供された。
【0081】
請求項3に記載の発明に関しては、内側偏心ディスクに外側偏心ディスクを回動自在に勘着させた偏心リング割出機構を回転ギアーケースに内包し、回転ギアーケースのディスク部の内径面と太陽歯車の軸筒外周面との間から外側に出された内側偏心ディスクと駆動歯車のそれぞれの軸筒の端を回転させることにより偏心リングの偏心方向と偏心量を任意に割出せるようにしたことにより、偏心リングとローラーとの接触部分や遊星歯車機構を含む歯車列のオイル潤滑を可能にする実用的な回転翼の構造が提供された。
【0082】
請求項4に記載の発明に関しては、ローラーが偏心リングの内径面とランナーリングの外形面との間で、遊びを規制され、遊動スキマにと油膜を保って自転し、滑りながら公転できるようにしたので、偏心リングとローラーとの接触部分や遊星歯車機構を含む歯車列のオイル潤滑を可能にする実用的な回転翼の構造が提供された。
【0083】
請求項5に記載の発明に関しては、歯車機構によって割出されて回転する要素翼に、それらの要素翼と連動して回転する追従要素翼を追加して要素翼の枚数を倍増でき、より多くの要素翼を駆動できる、コンパクトで実用的な回転翼の機構が提供された。
【0084】
請求項6に記載の発明に関しては、回転翼の中央部に機体の内側に突き出された静止翼の軸筒部で静止翼の回転角度位置を調節することにより、前方の要素翼の後流れを偏向させて後方の要素翼に流入させ、後方の要素翼に発生する空気力を制御でき、回転翼の中に組入れて、その中心軸に発生する回転モーメントを飛行機のピッチング回転の制御を害さない程度に小さくするための実用的な回転翼の機構が提供された。
【0085】
請求項7に記載の発明に関しては、水平尾翼の外側に、外側翼をピッチング回転方向に回動自在に勘着し、角度位置を機体の内側から水平尾翼を貫通する連結棒を介して調節できるようにしたため、飛行中に、回転翼に発生する3次元の回転モーメントを抑えて、飛行機のピッチング、ローリング、ヨーイング回転に対する静安定性を確保するための実用的な飛行機の機構が提供された。
【0086】
請求項8に記載の発明に関しては、ローリング回転とヨーイング回転に対する静安定性を確保するために寄与する、上反り角と後退角を持った下側静止翼を回転翼の下方に機体から外側に突き出して装着したため、飛行中に、回転翼に発生する3次元の回転モーメントを抑えて、飛行機のピッチング、ローリング、ヨーイング回転に対する静安定性を確保するための実用的な飛行機の機構が提供された。
【0087】
回転翼の下に同じ幅で静止翼を張り出すことは、ピッチング平行回転翼を貫流する気流が、前方から入りやや斜め後方に流出することが解析的に明らかにできたことから生まれたアイデアである。この気流は静止翼の位置と翼型を適切に選べば、静止翼上面の気流を加速するので、静止翼に大きな揚力を発生する高揚力機構が形成される。この原理は、従来の飛行機のエンジン排気やプロペラの後流れを主翼上面に当てるのと同じであるが、回転翼の後流の方が翼の上部を層状に流せるので効率を改善できる。
また気流を吹き降ろすヘリコプターではローターコーンの下に大きな静止翼を張り出すことは吹き下し流を堰き止めるので考えられる設計ではない。
【0088】
即ち、本発明により、左右の回転翼に発生する揚力、抗力、回転モーメントを調節することによって、飛行準備から離陸、上昇、加速、水平、減速、降下、着陸、停止に至るまでの全ての飛行モードにおいて、従来の飛行機に準じた機構で原理的に静安定性を確保できる見通しが得られた。
【0089】
本発明は、かなり複雑な制御機構にはなったが、従来の飛行機に準じた機体のローリング、ピッチング、ヨーイング回転に対する静安定性を備え、更に、Uターンやピンポイント着陸のような鳥の持つ多様な優れた飛行性能と操縦性能の開発に備えることができた。
【図面の簡単な説明】
【0090】
【図1】回転翼の機構を説明するための左側の回転翼の断面図
【図2】回転翼の機構を機体の左側から見たレイアウト図
【図3】回転翼の機構を図01のA−A断面矢視の左側面図
【図4】回転翼の機構を図01のB−B断面矢視の左側面図
【図5】回転翼の機構を図01のC−C断面矢視の左側面図
【図6】歯車列の伝導経路を説明する模式図
【図7】遊星歯車による遥動角の伝達についての説明タグ
【図8】遊動歯車による差動角度の計算式の説明図
【図9】遊動歯車による差動角度の計算式の説明タグ
【図10】偏心-遥動変換機構の説明図
【図11】偏心-遥動変換機構の4節リンクの説明図
【図12】偏心リング割出機構の機体内側から見た右側面図
【図13】偏心リング割出機構の断面図
【図14】偏心リング割出機構の機体外側から見た左側面図
【図15】偏心リングとローラーとライナーリングの関係の断面説明図
【図16】偏心リングとローラーとライナーリングの関係の左側面説明図
【図17】要素翼の取り付け部品である要素翼軸を機体外側から見た図
【図18】要素翼の取り付け部品であるエンドケースを機体中央側から見た図
【図19】中央静止翼を前から見た断面図
【図20】中央静止翼の左側面図
【図21】回転翼飛行機の外観三面図
【図22】要素翼に入る気流の流入速度ベクトルの説明図
【図23】6枚の要素翼を追従させた回転翼のレイアウト図
【図24】追従させた要素翼を小さめにした回転翼のレイアウト図
【図25】追従させた要素翼の翼型を変えた回転翼のレイアウト図
【図26】遥動機構を省いた簡易な回転翼飛行機の外観三面図
【図27】図26の回転翼の機構を説明するための断面図
【図28】図26の回転翼の機構を説明するための左側面レイアウト図
【図29】前上げ回転方式の理想モデルの回転翼飛行機の外観三面図
【図30】回転翼飛行機の機体の左側面図
【図31】試計算のために仮定した要素翼の空力特性グラフ
【図32】中央静止翼の作動原理の説明図
【図33】中央静止翼と外側翼の作用と要素翼の揚力の関係−1
【図34】中央静止翼と外側翼の作用と要素翼の揚力の関係−2
【図35】中央静止翼と外側翼の作用と要素翼の揚力の関係−3
【図36】中央静止翼と外側翼の作用と要素翼の抗力の関係−1
【図37】中央静止翼と外側翼の作用と要素翼の抗力の関係−2
【図38】中央静止翼と外側翼の作用と要素翼の抗力の関係−3
【図39】前下げ回転方式の場合の各種制御入力ファクターの影響−1
【図40】前下げ回転方式の場合の各種制御入力ファクターの影響−2
【図41】前下げ回転方式の場合の各種制御入力ファクターの影響−3
【図42】前下げ回転方式の場合の各種制御入力ファクターの影響−4
【図43】前上げ回転方式の場合の各種制御入力ファクターの影響−1
【図44】前上げ回転方式の場合の各種制御入力ファクターの影響−2
【図45】前上げ回転方式の場合の各種制御入力ファクターの影響−3
【図46】前上げ回転方式の場合の各種制御入力ファクターの影響−4
【図47】理想モデルの回転翼飛行機の飛行モードの説明図
【図48】理想モデルの回転翼飛行機の飛行システムの説明図
【図49】鳥の翼の骨格と人間の手の骨格の対比の説明図
【図50】鳥の羽ばたき速度ベクトルの説明図
【図51】羽ばたき翼と回転翼の流入気流ベクトルの違いの模式図
【図52】羽ばたき翼と回転翼の流入気流ベクトルの違いの説明図
【図53】鳥の羽根の間のスキマ開閉機構の説明図
【図54】鳥の羽ばたき中の翼の折り方の一例を示す模式図
【図55】鳥の胸の骨格と胸筋の説明図
【発明を実施するための形態】
【0091】
鳥は、打ち下し工程と跳ね上げ工程を繰り返す羽ばたき運動の中で推力と揚力を得ながら、体がピッチング回転しないように制御している。
【0092】
その間には、次のような色々なメカニズムによって必要な空気力を発生し、制御しているように見える。その様子を図49〜図55の模式図を使って説明する。
【0093】
・ 羽ばたき運動では、翼の手の部分と腕の部分とでは翼の速度が大きく変わるため、飛行速度と羽ばたき速度のベクトル和である流入速度が変わる。図51を見よ。
・ 工程中に、翼を付ける肩と腕と手の関節を利用して翼を捩じることにより、それぞれの部分に必要な迎角を得ている。図49を見よ。
・ 工程中に、空気力による羽根の撓みと捻れを利用して、風切り羽根の隙間を広げて空気を逃がし、あるいは閉じて流れを変えている。図53を見よ。
・ 鳥を前方から見た翼の展開形状を跳ね上げ工程では上凸にして空気を外に逃がし、打ち下し工程では空気を押し下げて翼上面に巻き込む。図54を見よ。
・ 跳ね上げ工程の速度と打ち下し工程の速度を変えて、上向きと下向きとで発生する空気力を変えている。ただし、必ずしも、常に、打ち下し速度を跳ね上げ速度より速くしているわけではない。
・ 鳥は、跳ね上げ用と打ち下し用で別の筋肉を使っているが、それらの筋肉の剛性の違いを利用して、翼の梁としての撓み形状を変えている。図54、図55を見よ。
・ 軟構造を利用して手や指の曲がりや捻れのタイミングを遅らせて空気力の急変を防止している。
【0094】
特許文献1の発明では、鳥の持つ巧妙な羽ばたき機構をそのままではないが、やや複雑なままに模擬するために、回転する円筒面の稜線上に複数の要素翼を配置し、それらを、基本的に平行を保ちながら、周期的に遥動を加えて回転させることにより、鳥の羽ばたき運動の打ち下し工程と跳ね上げ工程を近似的に模擬している。
【0095】
流体力学の翼理論によると、翼に発生する空気力の作用点である風圧中心は翼の前端から翼弦の25%付近にある。一方、キャンバーの付いた翼では前下げモーメントが発生するが、翼弦の25%付近にある空力中心をとると、回転モーメントの大きさは迎角が変わっても殆ど変わらなくなる。その他に翼には遠心力と慣性力と慣性モーメントが発生する。回転中心を決めると、要素翼にはこれらに起因して回転モーメントが発生する。そのため、要素翼の回転中心は翼端から25%の位置とは限らず、設計仕様に応じて最適な位置があると思われる。しかし、要素翼の回転中心を決める設計理論は、まだ開発できていないので、今は、要素翼に発生する空気力によって要素翼の回転中心周りに発生する回転モーメントは回転翼を回転翼中心軸廻りに回転させる回転モーメントと比べて小さいと考えられるので、無視して、回転中心は翼弦の50%の位置としておく。
【0096】
一方、回転翼中心軸には、各要素翼に発生する空気力が回転翼中心軸廻りに発生する回転モーメントの総和として、大きな回転モーメントが発生する。
【0097】
回転翼中心軸に発生する回転モーメントは飛行中の機体にピッチング回転運動を発生させるので、ピッチング回転翼飛行機の設計において、当面の最も重要な解析課題であった。
【0098】
解析に先立ち、要素翼の操作方法に関して、次を確認しておく。
・ 太陽歯車軸の回転角を調節することで全要素翼の取付け角γを同時に同量、同方向に増減できる。
・ 偏心-遥動変換機構と遊星歯車を用いて差動させる遥動付加機構によって偏心リングの偏心量eを変えることによって、打ち下し工程と跳ね上げ工程で、互いに反対方向に要素翼の遥動角δを増減できる。
・ 回転翼の回転速度を変えることにより、要素翼に入る空気の流入角度を調節できる。
・ 前側の要素翼の後流れによって、後側の要素翼に流入する流れが影響を受ける。この影響は中央静止翼により流れを偏向させることにより調節できる。
【0099】
以上を踏まえて、特許文献1をベースにして、要素翼とその駆動機構の機構を見直し、構造を簡潔にし、新たに、回転翼の中央部に、前方の要素翼の後流れを偏向させて後方の要素翼に流入させる中央静止翼を設けた。主な設計検討事項は下記の(1)から(7)の通りである。図01〜図29を用いて説明する。
【0100】
・ 要素翼単体とその両端の結合剛性を高めた。
要素翼を構造解析上は扁平管のトルクチューブとし、その内側の結合部品である要素翼軸を翼ピニオンに回動不能に勘合し、要素翼を当て、翼ピニオンの内側から通しボルトで貫通させ、エンドケースのメネジで引き付けて要素翼軸系を一体に結合させた構造とした。そのために設計上、以下の事項を配慮して、軽量で高い要素翼剛性と高い結合剛性を持った要素翼ケージ構造を設計した。
【0101】
・ トルクチューブの扁平な穴に勘合する扁平な突起部分を要素翼軸の外側端とエンドケースの内側端に形成し、合わせ面の位置決めと回転角度位置の位置決めと回転トルクの伝達を図る。
・ 翼ピニオンの外側端には内歯歯形を形成し、要素翼軸の内側端に形成した外歯歯形と回動不能にスキマ勘合して、回転トルクの伝達と位置決めを図った。
・ 翼ピニオン、要素翼軸、トルクチューブ、エンドケースを全て端面で突き当てて、通しボルトで軸方向に締め切って、要素翼系の一体化を図り、曲げ/捻り剛性を高めた。
・ 要素翼の回転中心の位置の変更が、トルクチューブの長穴の範囲で、要素翼軸とエンドケースを変えるだけで、要素翼を変えずにできるようにした。
・ エンドケースの外側端には、与圧を掛けた2個のベアリングを勘着するハウジングを形成し、回転翼端盤との間で回動自在に高い結合剛性を確保できるようにした。
【0102】
・ 要素翼の個数を増やせるようにした。
次の工夫により、偏心-遥動変換機構をコンパクトにし、レイアウトを改善した。その上で、歯車列で駆動された要素翼に連動する追従要素翼を追加することによって要素翼の数を倍増できる設計オプションも用意した。図01、図02、図23〜図25を見よ。
【0103】
・ 偏心リングの径を大きくした。
・ ローラーアームとリテーナリングを一体化した。
・ ローラーを1個にして偏心リングの内周面を転導させた。
・ 全てのローラーの遊びを偏心リングの中心側から規制するランナーリングを新設した。
【0104】
要素翼の本数の増加には次のメリットがある。
a. 要素翼が細長くなり、アスペクト比が大きくなり、翼型の空力性能が向上する。
b. 要素翼の軽量化により、回転数のアップが図れる。
c. 回転翼の脈動周波数を上げられ、回転をスムーズにできる。
d. 回転翼の中央部分に中央静止翼を設置するスペースが確保される。
e. 要素翼表面の空気の通過経路を短くし、通過時間中の迎角変化を小さくできる。
【0105】
なお、追従要素翼は、従来の飛行機のフラップの機能を持つようにも設計できるが、その設計スペックは、個別の開発の中でメリットとデメリットを勘案しながら決めてゆかねばならない。
【0106】
(3)オイル潤滑を可能にした。
そのために、次のオイル潤滑を必要とする範囲を外部からシールできる回転ギアーケースに包み込んだ。偏心リング割出機構は、そのために新設計した。図01〜図02、図12〜16を見よ。
・ 太陽歯車から反転歯車までの歯車列
・ ローラーと偏心リングの接触点
・ 偏心リング割出機構
【0107】
(4)軸受け方式を選定してレイアウトと構造を見直した。
ラジアル方向では、転がり軸受けとスベリ軸受けを使い分けた。スラスト方向(幅方向)では、隣接して相対運動する部品の間に潤滑スペーサーを挟んだ。図01を見よ。
【0108】
(5) 剛性アップとコンパクト化のために部品構成を見直した。図01を見よ。
【0109】
(6)機体のピッチング回転の制御を確実にするために、次の機能を担う中央静止翼を設定した。図01、図05、図19〜21、図26〜図29を見よ。
・ 斜め後下方に流出する前側の要素翼の後流れは、そのまま後側の要素翼に流入させると回転翼に発生する回転モーメントを過大にしてしまうことがあるので、中間で流れを偏向させてその影響を補償する。
・ 鳥は推力を分担する手の部分と揚力を分担する腕の部分を適度に捻ってそれぞれに最適な迎角を得ている。回転翼では、この機能を歯車機構により作り出している。即ち、打ち下し工程と跳ね上げ工程で要素翼を機械的に反対方向に遥動させ、両工程で適切な迎角を持って流入気流に向かわせる機構としている。しかし、この機構の機械的な動きなので、両工程で最適な迎角になるように調節し、また、状況に応じて制御することはできなかった。それを可能にするために中間で流れを可変に偏向させる機能を追加した。
【0110】
(7) 飛行時の機体のピッチング回転に対する静安定性を確保するために、新たな機能を追加した。即ち、従来の飛行機では主翼の空気力を発生する位置が前後方向でほとんど移動しないので、鳥の羽ばたき翼の機能を主翼とプロペラに置き換えられ、発生する機体をピッチング回転させる回転モーメントは水平尾翼のエレベーターの操作で制御できた。
【0111】
ピッチング回転翼飛行機も従来の飛行機のプロペラと同じように抗力に打勝つトルクで要素翼を回転させて空気力を発生し、その成分として揚力と推力を得ている。従来の飛行機では駆動トルクの反動は機体をローリング回転させるが、長いスパンの主翼の端のエルロンでバランスを取っている。ピッチング回転翼飛行機では、この駆動トルクの反動は機体をピッチング回転させる。この反動は加速や減速の際に必然的に発生するので、水平に飛行するためには、常に、バランスさせる必要がある。この機能は、従来の飛行機の水平尾翼とエレベーターの機能とは別に備えなければならない。機体の後部に迎角可変の静止翼を、従来の飛行機の水平尾翼とは別に、外側翼として新設した。図21、図26、図29を見よ。
【0112】
飛行時のローリング回転に対する静安定性を確保するためには、鳥も従来の飛行機も主翼に上反り角を付けているが、それに倣って、上反り角を機体の重心付近の翼につけた。図21、図26、図29を見よ。
上反り角は、回転翼と下側静止翼のどちらかまたは両方に付ける。下側静止翼には、オプションとして、折畳めるエキステンション(延長静止翼)を付けることもできる。
【0113】
要素翼の先端や中央静止翼の先端に別の補助翼をつけるアイデアも種々検討された。重心から遠い位置で流入気流や回転翼の伴流を処理すると効きのよい姿勢制御やドリフティング制御が可能になりそうである。ハチドリやヒバリのような作業用ロボット用の回転翼飛行機を狙う場合には有効と思われるアイデアが続々と出てくる。しかし、この領域まで含めると発明活動が余りに輻輳するので、今の段階では、この領域はもう一つの進化の幹と考えて、具体化の検討は留保した。
【0114】
また、全幅を広げ、構造を複雑にしてしまうこの領域のアイデアは、翼のスパンを従来の飛行機と比べて半減できる回転翼飛行機の商品性の特徴を著しく損なうとも判断した。
【0115】
飛行時の機体のヨー回転に対する静安定性は、従来の飛行機では、主翼の後退角と垂直尾翼とラダーによって確保されている。回転翼を用いた飛行機では、これに準じて、垂直尾翼とラダーは取り付けた。しかし、回転翼を後退角をつけて取り付けることは、回転翼のヨー回転コントロール特性が解明されるまで採用を留保した。カラスが水平面内でシャープにUターンする挙動を見ると、平行回転翼には固定翼の性能を補って余りあるヨーイング回転に対する静安定性と操縦性を獲得できる新しい工夫の余地が残されていると予感している。
【0116】
近い将来の実用化を展望して、遥動機能を退化させた、シンプルな回転翼の検討に着手した。ハクチョウは、翼の捻り機能を退化させて、タカのような多様な飛行術を放棄して長距離飛行能力と餌を安全に豊富に採れる水上生活能力を獲得した。羽ばたきは緩慢で迎角の変化は、翼の形状や弾性変形や関節の僅かな捻れによって得ているように見える。ハクチョウの羽ばたきでの、翼や羽根の変形と動きを別の方法で模擬できれば、また、短い滑走路の使用が許されれば、ピンポイントで離着陸する機能を退化させ、実用的に大変魅力的な短い滑走路で離着陸できる飛行機が可能となるかもしれない。図26〜図29を見よ。
【0117】
次に、以上のように設計した回転翼を用いて色々な飛行モードで飛行する時にどのような空力性能が得られ、どのような姿勢制御ができるかをラフな計算で定量的に検証してみた。図30〜図48を用いて説明する。
【0118】
この飛行機は、走行風と回転速度のベクトル和で流入する空気を回転翼で受けて空気力を発生し、助走なしで舞い上がることもできる。また、助走が許される場合は走行速度を上げながら回転翼の回転速度も加速できる。回転翼に入るエネルギーは機体の助走運動エネルギーと回転翼の回転運動エネルギーに按分されて蓄積される。実際、鳥の助走の仕方は種によって様々である。
【0119】
助走なしで舞い上がる時には、回転翼は次のように操作される。図32〜図35を見よ。
A.回転速度を、離陸回転速度にセットし、負荷に対して駆動力を増す制御をする。
B.取付け角を調節して、全ての要素翼の迎角を大きくし、揚力を大きくする。
C.遥動角を調節して、前後の要素翼の迎角を大きくし、推力を上げる。
D.中央静止翼の切り返し角を調節し、ピッチング回転モーメントを制御する。
【0120】
鳥はそれぞれの種によって固有の羽ばたき周波数を持っていて、周波数は大きく変えずに振幅を調節して羽ばたき速度を変えている。それに対し、回転翼では振幅は変えられないが、代わりに回転数を調節して回転速度を変えることができる。図50〜図52を見よ。
【0121】
それぞれの飛行モードでの飛行操作としては色々な手順がとれるが、一例を示す。
着陸地点では、推力を下げ、徐々に迎角を大きくして揚力を維持しながら抗力を上げ、飛行速度を下げて、空中に停止し、その後は、迎角を小さくしながら回転速度を上げて軟着陸する。飛行速度が十分に下がっている場合は、着陸ポイントに降下し、惰走なしで停止できる。飛行速度を残して着陸する場合は、着陸後は制動を掛けながら惰走し停止する。地上では踏ん張れるので、負の揚力や失速で発生する大きな抗力を発生して急制動を掛けることもできる。
【0122】
回転翼にしたために要素翼の揚力によって発生してしまう回転モーメントは中央静止翼によって調節できることが分かった。一方、要素翼の抗力によって発生する回転モーメントは、機体をピッチング回転方向に回転させるが、揚力に起因する回転モーメントと比べて一桁小さい。しかし、飛行のために必須な回転翼駆動トルクであり、水平尾翼の外側に取り付けた外側翼に発生させる揚力でバランスを取らねばならない。図33〜図38を見よ。
【0123】
従来の飛行機は、エンジンでプロペラを駆動して得られた推力と機体の抗力との差し引きで加速力を得ている。回転翼飛行機も翼理論に則って設計されているので、飛行機と同じく、エンジンで回転翼を駆動する回転トルクによって推力を得る。
【0124】
従来の飛行機では駆動トルクの反力はローリング回転方向でキャンセルされるが、回転翼ではピッチング方向でキャンセルされねばならない。回転翼の駆動トルク反力は、飛行機の後部の外側翼に発生させる揚力に回転翼中心までの距離を掛けた回転モーメントでキャンセルするように設計した。
【0125】
分かり易さのために、揚力により発生する空気力と回転モーメントは、最初、要素翼や補助翼に発生する抗力をゼロとして計算したが、その後、駆動トルクと推力と抗力の関係を定量的に理解するために、要素翼や補助翼に発生する揚力をゼロにして、抗力により発生する空気力と回転モーメントを試算してみた。図33〜図38を見よ。
【0126】
これまでは要素翼の翼型については詳しく論じてきてはいないが、従来の静止翼の翼型の利用の可能性と限界を見ておく必要がある。この問題の存在は要素翼へ流入する気流ベクトルを回転翼と羽ばたき翼と固定翼で比較してみると容易に推定できる。図22に模示するように、気流の分子(○印で示す)は、1から時間を追って2,3、、、、と順番に要素翼に流入する。更に、要素翼の周期的な遥動が重なると翼面を通過する空気が翼面によって曲げられる。そのため、それぞれの分子が要素翼から抜けるまでに要素翼を取り巻く流束の形が変わる。
【0127】
一方、回転翼での常用流速は、0〜40m/s程度に設計される。この速度は340m/sの音速と比べて1/10に近い。また、流束の変化も衝撃波を発生するような急変ではない。また、飛行速度が回転速度より十分大きく、要素翼の本数が多く、要素翼の翼弦が十分小さくなると、従来の静止翼の翼型が利用できるであろう。
今はまだこのような条件を踏まえた流れの解析と翼型の設計理論ができていない。従って、実務的には、翼型の開発は、設計仕様に従って迎角の変化を設計し、基準翼型を仮設計して試作し、キャンバー、翼厚、回転中心などを、できれば風洞を使って実験しながら、チューニングしてゆくことで開発できるであろう。しかし、開発効率を高めるためには流体力学の専門家の解析とシミュレーションが必須である。ピッチング回転翼のための翼型設計理論の開発は今後の最も重要な設計準備課題として残されている。
【0128】
回転翼の回転方向は前上がり方向に回転させても揚力と推力を発生できる。基本方式としてどちらが有利かはまだ判断できていない。回転方向を飛行中に変えることは鳥もやっておらず不自然である。回転方向は、オートローテーション時も含めて同じ方向にしたい。その可能性は、今後、見極めてゆきたい。今の時点では、理想モデルとして、前上がり回転方式を選んでおく。機能の違う水平尾翼と外側翼を分離独立させ、下側静止翼の外側には折れる補助翼をつける。要素翼の弾性効果や形状効果を進化させ、回転翼の遥動機能は退化させる。姿勢角は鳥のように進行方向に向けて飛行するモードとする。ここまで進化させられると、ピッチング回転翼飛行機は従来の小型飛行機と比較し、機能の類似と違いを明らかに主張できるようになるであろう。図29、図43〜図48を見よ。
【実施例1】
【0129】
平行回転翼の原理については、参考文献1に詳しく説明されている。それを踏まえて、本発明では、アイデアの具体化を図りながら、新たな工夫を織り込んで基礎設計を試みた。まだ中間段階であるが、これまでに得られた知見を纏めた。その概要を、次の項目に従って、図01〜図29を用いて説明する。
【0130】
(1)回転翼1の要素翼6のアスペクト比の増大を狙って、枚数を増やして翼弦を小さくするために、ローラーアーム21をリテーナリング14と一体化し、偏心リング20の径を大きくし、偏心-遥動変換機構24を再設計した。図01、図02、図10〜図12、図15、図16を見よ。
【0131】
(2)回転翼1の要素翼6のアスペクト比の増大を狙って、枚数を増やして翼弦を小さくするために、追従要素翼28をオプションとして用意した。図23〜図25を見よ。
【0132】
(3)回転翼1の回転速度の確保を狙って、複数の要素翼6を回転自在に結合した要素翼ケージ47の構造を軽量化しながら高剛性にするために、軸受けの選定とその取付け構造、および、要素翼6の基本断面とその結合構造を設計した。図01、図12、図17、図18、図27を見よ。
【0133】
(4)回転翼1の回転速度の確保を狙って、動力伝導系を成り立たせるために、伝導方式の使い分け方針を仮決めした。図01、図02、図06、図27を見よ。
【0134】
(5)回転翼1の回転速度の確保を狙って、支持系を成り立たせるために、回転部品と支持部品をレイアウトし、転がり軸受けとスベリ軸受けの方式選定方針を決めた。図01、図27を見よ。
【0135】
(6)回転翼1の回転速度の確保を狙って、歯車とローラーのオイル潤滑を可能にするために、新しい偏心リング割出機構9を設計し、回転ギアーケース41内に収めながらシールされた軸筒を外から回転して操作できるようにした。図01、図02、図12〜図14を見よ。
【0136】
(7)回転翼1に発生する回転モーメントの制御を狙って、前側の要素翼6から流出する後流れを偏向させて後側の要素翼6に流入させるために、新たに、回転翼1の中央付近に中央静止翼50を新設した。図01、図05、図19〜図21、図26、図29を見よ。
【0137】
(8)飛行機90に発生するピッチング回転に対する静安定性の確保を狙って、回転翼では抑えきれないピッチング回転モーメントを制御するために、新たに、水平尾翼67の側端に外側翼66をピッチング回転軸廻りに回転角を割出せるように取り付けた。図21、図26、図29、図33〜図38を見よ。
(9)飛行機90に発生するローリング回転に対する静安定性の確保を狙って、短いスパンのであることを考慮して、従来の飛行機に倣って回転翼1そのものを上反り角度分傾斜させて取り付けた。また、オプションとして、回転翼1の下方に下側静止翼70を機体から外側に突き出して取り付けた場合には、この翼にも上反り角を付けるた。図21、図26、図29を見よ。
【0138】
(10)飛行機90に発生するヨーイング回転に対する静安定性の確保を狙って、従来の飛行機に倣って、垂直尾翼68を設定し、水平尾翼64と外側翼66に後退角をつけた。また、オプションの下側静止翼70にも後退角をつけた。図21、図26、図29を見よ。
【0139】
(11)回転翼飛行機の現時点での理想モデルの設計。
ツルのような大型の渡り鳥の水平飛行では、翼を構成する羽根自体の弾性の非線形性や非対称形状を利用して、打ち下ろし工程で発生する揚力が跳ね上げ工程で発生する揚力より大きくなる非対称な羽ばたき運動が起されているが、この間には回転モーメントも両工程で相殺されていると推察される。
【0140】
機械的な遥動付加を不要にできるピッチング回転翼は非常に魅力的であるので、遊星歯車機構を一つの中間歯車に置き換え偏心-遥動変換機構と偏心リング割出機構を省き、平行回転だけの単純な歯車列とした回転翼飛行機を研究用に設計した。図26〜図29を見よ。
【0141】
以下、これらの新たに織り込まれた設計項目に従って説明する。
(1)要素翼1の枚数を増すための偏心-遥動変換機構24の再設計について、図01〜図05、図10〜図12、図15、図16を用いて説明する。
【0142】
本発明の回転翼1では、要素翼6の傾斜角αを周期的に変動させることにより、打ち下し工程と跳ね上げ工程を同時に発生している。そして、飛行中の飛行モードの切り替えに応じて、揚力と推力と回転モーメントを、より的確に制御するために、要素翼6のみを用いた特許文献1の回転翼に中央静止翼50を組み込んだ。
【0143】
回転翼1は、回転ユニット2と支持ユニット3とから構成されている。回転ユニット2は支持ユニット3に回転自在に取り付けられている。支持ユニット3はボディー10に取付けられる。回転ユニット2は、ボディー10に搭載された動力源から駆動される。
【0144】
回転ユニット2には、回転翼盤4と回転翼端盤5との間の外周に近い円筒面上の稜線を回転軸とする複数の要素翼6が渡され、それぞれの要素翼軸7を介して翼ピニオン18に結合されている。回転翼盤4の内部には、それぞれの要素翼6を周期的な遥動を付加しながら平行回転させる歯車列8と、遥動角を付加する偏心-遥動変換機構24と、偏心量eと偏心角ηを割出して伝達するための偏心リング割出機構9が組み込まれている。
【0145】
回転翼盤4には、図1、図6に示すように、支持ユニット3に連結されて静止している一つの太陽歯車11から放射状に展開する要素翼6毎に歯車列8が組み込まれており、これによって平行回転に遥動回転を加えることができる。この機構の原理については、特許文献1に詳しく説明されている。
【0146】
各歯車列8の中では、太陽歯車11に従動歯車12が噛み合わされている。従動歯車12には同軸に内歯歯車13が形成されていて、その内歯歯車13には、互いにリテーナリング14で回動自在に連結された複数の遊星歯車15が噛み合わされており、それらの遊星歯車15は、従動歯車12と同軸で遊動する反転歯車16に噛み合わされている。反転歯車16には同軸にオフセットさせて反転ピニオン17が結合されており、その反転ピニオン17から、要素翼6の一部である要素翼軸7が結合される翼ピニオン18に、タイミングベルトA42〜中間ピニオンA44〜中間ピニオンB45〜タイミングベルトB43からなるタイミングベルト伝導を介して回転が伝えられる。図06を見よ。
【0147】
遊星歯車15を回動自在に嵌合しているリテーナリング14が遥動しない時には、各要素翼6が回転翼盤4に乗って回転する回転角は、それぞれの歯車列8の中で反転され、同じ回転角だけ戻される。従って、各歯車列8は、基本的に、各要素翼6を初期に設定された取付け角γを保ったまま平行回転させる機構となっている。
【0148】
回転翼盤4が回転すると、従動歯車12が、支持ユニット3に連結されて静止している太陽歯車11を駆って、回転翼盤4上で回転する。従動歯車12と同軸の内歯歯車13は従動歯車12と同じ角度を回転翼盤4上で回転する。その内歯歯車13に噛み合っている遊星歯車15は、回転翼盤4上で止まっているリテーナリング14に遊星歯車ジョイントピン19で回動自在に嵌合されているので、内歯歯車13を駆って反転歯車16を反転させる。
【0149】
遊星歯車15を回動自在に嵌合しているリテーナリング14が遥動する時には、リテーナリング14は、回転翼盤4の回転位置に応じて内歯歯車13の回転と反転歯車16の間で伝達される回転角を加減(差動)し、周期的に要素翼6の回転角度θを進め、または、遅らせる。反転歯車16の回転は、同軸にオフセットして固定されている反転ピニオン17に伝えられ、そこから更に、タイミングベルト伝導を介して、翼ピニオン18に伝えられる。図6〜図9を見よ。
【0150】
次に、この発明で大幅にコンパクト化を図った、平行回転する要素翼6に周期的に遥動回転を付加する偏心-遥動変換機構24について説明する。この機構は、打ち下し工程と跳ね上げ工程とで要素翼6の傾斜角αを反対方向に遥動させるための機構の一部であり、偏心リング割出機構9で割出される偏心量eと偏心角度ηを、リテーナリング14の遥動角ζに変換する。図10〜図11を見よ。
【0151】
遊星歯車15を回動自在に結合しているリテーナリング14から突出されたアーム部分にはローラーアーム21が形成されており、その先端部には1個のローラー23がジョイントピン22で回動自在に結合されている。
【0152】
ローラー23は偏心リング20の内面を転動し、偏心リング20の中心の周りに回転するので、偏心量eと偏心角度ηは、4節リンクの動きによってリテーナリング14の遥動回転に変換される。
【0153】
偏心量eと偏心角度ηは、別途、回転ユニット2に内包される偏心リング割出機構9によって割出された偏心リング20の位置から検出される。
【0154】
リテーナリング14の中心とそのアーム先端部のジョイントピン22の中心とを結んだ線と、偏心リング20の中心とジョイントピン22の中心とを結んだ線は、ほぼ、直角になるように設計される。そのため、偏心リング20の内周面を転動するローラー23の動きは、リテーナリング14のアーム先端部のジョイントピン22の中心とリテーナリング14の回転中心の間の距離をアーム半径とした、リテーナリング14の遥動回転に変換される。
【0155】
偏心量eと偏心角度ηが与えられるとリテーナリング14は、与えられた偏心量eと偏心角度ηによって変形する4節リンクによって変換された遥動角ζで、遊星歯車15の中心を結んだ円周上を周期的に遥動する。この遥動は内歯歯車13に対して遊星歯車15を遥動回転させ、遊星歯車15に噛み合った反転歯車16を遥動回転させ、反転ピニオン17、タイミングベルト伝導を介して翼ピニオン18に伝えられて、各要素翼6を遥動回転させる。
【0156】
レイアウト上、偏心リング20の径は大きめに設定した。
【0157】
偏心-遥動変換機構24は、図01、図02、図03、図15、図16に示すように、一つの偏心リング20の形状を、複数のローラーアーム21が、同一平面上で、同時に追跡する機構としている。
【0158】
偏心リング20の内周面を一つのローラー23で追跡する時、ローラー23はローラーアーム21の遠心力によって内周面に押し付けられるが、偏心運動中の駆動反力、駆動抵抗、加速度や振動によって離れる可能性がある。そこで、全てのローラー23に偏心リング20の中心の側から接して自由に回転するランナーリング27を設定し、全てのローラー23遊びを同時に相互に規制させた。
【0159】
各ローラー23とランナーリング27との間には原理的に周期的なスベリが発生するが、オイル潤滑されるので適切なスベリ隙間を与えれば振動を抑えて焼付かずに運転できる。
【0160】
この新方式によって、偏心-遥動変換機構24をコンパクトにし、ローラー23のオフセット(ローラー23と遊星歯車15の間の軸方向の距離)も小さくできた。
【0161】
(2)追従要素翼28のオプションについて、その一例である、図23〜図25を用いて説明する。
【0162】
要素翼6に補助的に追従要素翼28を連動させることによって、近似的に要素翼数を倍増できる。図23は、歯車列8で駆動される6枚の要素翼6に6枚の追従要素翼28をタイミングベルト29で連結させて12枚としたレイアウトを示す。図24は、追従要素翼28を小さめにし、タイミングベルトの噛み合いをずらして取付け角を変えたレイアウトを示す。図25は、更に、追従要素翼28の翼型を変えたレイアウトを示す。連結方法は、チェーンでも歯車でも構わない。また、連結方向は、追従する方向でも先行する方向でも構わない。2重に連結させれば3倍増も可能である。
【0163】
(3)要素翼6の軸受けの選定とその取付け構造、および、要素翼6の基本断面とその結合構造について説明する。重負荷用の転がり軸受方式と軽負荷用の滑り軸受方式の2方式について設計した。両方式の設計例を図01、図02、図17、図18、図27に示す。
【0164】
転がり軸受け方式では、図01に示すように、回転翼盤4の側と回転翼端盤5の側の双方に、2個ずつのアンギュラー玉軸受を与圧を掛けて装着し、回転は許しながら、高い倒れ剛性を持たせた。
【0165】
即ち、回転翼盤4の側については、2個の内側用アンギュラー玉軸受30の内輪で翼ピニオン18を挟み、台形バネで両外輪に与圧を掛けて回転翼盤4の穴に装着した。要素翼6に接合されている要素翼軸7は翼ピニオン18に嵌めて通しボルト32で引き付けて締結した。
【0166】
回転翼端盤5の側については、2個の外側用アンギュラー玉軸受31の内輪を、シムを挟んでツバ付ボス35に嵌め、リングナット36で固定し、外輪を薄めのシムを挟んでエンドケース37に挿入し、エンドリング38を端面に当てて複数のボルトで締め切った。与圧は内外輪に挟んだシムの厚さの差によって掛けられる。回転翼端盤5はツバ付ボス35の中心のメネジにボルト33で締結した。
【0167】
要素翼6の基本断面としては、要素翼6の軸部分にトルクチューブ39を形成し、その回転翼端盤5の側はエンドケース37に突き当てた。トルクチューブ39の周囲に翼型を形成する方法については、種々考えられるが、今の段階では、トルクチューブ39を心金にした樹脂の射出成形を想定しておく。要素翼軸7とエンドケース37の採用により、軸受で決まる要素翼6の回転中心とトルクチューブ39の位置をずらすことが容易となった。
【0168】
外側端に内歯歯形を形成している翼ピニオン18の中央の穴に、内側から挿入した通しボルト32を、内側端に翼ピニオン18の内歯歯形と回動不能にスキマ勘合する外歯歯形を形成しており、外側端にトルクチューブ39に勘合する扁平な突起部分を持つ要素翼軸7の穴に貫通させた。次に、要素翼6の心金を形成するトルクチューブ39に貫通させた。更に、内側端にトルクチューブ39に勘合する扁平な突起部分を持ち、外側端にベアリング31の取り付け構造を形成したエンドケース37の内側端の中央に形成されたメネジ部に締結して一体化する結合構造とした。
【0169】
この構造により要素翼6単体の曲げ/捻り剛性が確保された。両端の結合部品である要素翼軸7とエンドケース37に形成された扁平な突起部分のトルクチューブ39への挿入と、要素翼軸7の外歯歯形を翼ピニオン18の内歯歯形に回動不能にスキマ勘合することにより回転方向の位置合わせと廻り止めが図れた。翼ピニオン18の内側から挿入され要素翼軸7と要素翼6のトルクチューブを挟んで貫通した通しボルト32を、エンドケース37のメネジ部で引き付けることにより、要素翼系の一体化を図り、曲げ/捻り剛性を高めた。エンドケース37の外側のベアリングケースには与圧を掛けた2個のベアリング31を装着し、回転翼端盤5との間で回動自在に高い結合剛性を確保した。このような手段により、軽量で高い要素翼剛性と高い結合剛性を持った要素翼ケージ56が得られ、高い回転速度を有する回転翼1の構造が設計できた。
【0170】
滑り軸受け方式では、図27に示すように、回転翼盤X72の側と回転翼端盤X85の側の双方共、それぞれにツバ付ブッシュA75、ツバ付ブッシュB76を2個ずつ、微小な滑りスキを持たせて挿入し、回転は許しながら、撓やかな立体ラーメンの篭を形成して倒れを規制する構造とした。
【0171】
即ち、回転翼盤X72の側については、2個のツバ付ブッシュA75で従動歯車X84を挟み、それらを回転翼盤X72の穴に回動自在に勘着した。要素翼X86に接合されたツバ付ボスA79は従動歯車X84に嵌めて通しボルトA73によりエンドケース77とトルクチューブ89を介して引き付けて止めた。図27を見よ。
【0172】
回転翼端盤X85の側については、2個のツバ付ブッシュB76を回転翼端盤X85のフランジ部を挟んでボルトB74に嵌め、リングナット78でスキを持たせて挟んで締め切った。2個のツバ付ブッシュB76の外周面は、スキを持たせてエンドリング88で挟んだ。エンドリング88はエンドケース77の外側のフランジ部に切られたメネジにねじ込み固定した。
【0173】
要素翼X86の基本断面としては、要素翼X86の軸部分にトルクチューブ89を形成し、それを心金にして射出成形して肉部と外皮を形成した。トルクチューブ89の回転翼盤X72の側はツバ付ボスA79に突き当てた。ツバ付ボスA79とエンドケース77の採用により、軸受で決まる要素翼X86の回転中心とトルクチューブ89の位置をずらすことが容易となった。
【0174】
(4)トルク伝導方式の使い分け方針について、図01、図02、図06、図27を用いて説明する。
歯車列8の中で太陽歯車11から反転歯車16までは歯車を用い、オイル潤滑可能な回転ギアーケース41の中に収める。反転歯車16から同軸に突き出されて取り付けられた反転ピニオン17から要素翼ピニオン18まではタイミングベルトを用いる。アイドラーは無しにしているが、その実用性の確立は将来の技術的な課題である。シャフト駆動とすればアイドラーは不用となるが、その代替案への採用は現段階では見合わせておく。
【0175】
(5)転がり軸受けとスベリ軸受けの方式選定について、図01、図27を用いて説明する。
【0176】
本回転翼は、エンジンからの駆動力を回転力で空気に伝達する機械なので、軸受け方式は主としてラジアル荷重条件と潤滑条件と結合剛性条件を考慮して選定する。伝導系の末端から見ていくと、要素翼6の両端は、高速グリース潤滑と高い結合剛性が必要となるので、それぞれに与圧を掛けた2個ずつのアンギュラー玉軸受で支持する。中間ピニオンA44と同軸の中間ピニオンB45は、高速グリース潤滑と支持剛性が必要となるので、皿バネで与圧を掛けて、両端から1個ずつのアンギュラー玉軸受で挟んで支持する。反転ピニオン17も、高速グリース潤滑と支持剛性が必要となるので、皿バネで与圧を掛けて、両端から1個ずつのアンギュラー玉軸受で挟んで支持する。
【0177】
反転歯車16から従動歯車12までは、オイル潤滑可能な回転ギアーケース41の中で相互の歯車の噛み合いによって支持される。回転翼盤4を支持する取り付け台46の軸受は、高速回転する大荷重を受けるので、強制オイル潤滑されるメタルブッシュA51とする。中央静止翼50の支持軸53は、高速回転する回転翼盤4の中央の穴にメタルブッシュB54を介して支持されて、中央静止翼50に発生する空気力を担って静止状態を保つので、強制オイル潤滑とする。支持軸53は直径が大きくないので軸受のスベリ速度が低いので、レイアウト検討と詳細設計を進めればグリース潤滑の転がり軸受とするスペースも捻出できそうである。その他、設定角度調整のために低速で廻される太陽歯車11や偏心リング割出機構9の中の2つの割出用軸筒部には薄い自己潤滑ブッシュを嵌める。オイルシールやスペーサーについては、今の段階では、必要な部品と部位の想定にとどめる。
【0178】
(6)新設計の偏心リング割出機構について、図01、図02、図12〜図14を用いて説明する。
【0179】
偏心リング割出機構9は、内側偏心ディスク60の外側に外側偏心ディスク61を転がり軸受を介して回動自在に勘着した構造とした。外側偏心ディスク61には内歯歯車とラジアル軸受面が偏心された軸上に形成されている。内歯歯車は、内側偏心ディスク60に偏心して勘着された中継歯車62と噛み合っており、中継歯車62は外側偏心ディスク61を駆動する駆動歯車63の外歯歯車と噛み合っており、駆動歯車63は太陽歯車11の軸筒の外周に回動自在に勘着されている。内側偏心ディスク60は駆動歯車63の軸筒の外周に回動自在に勘着されている。
【0180】
内側偏心ディスク60と外側偏心ディスク61は共に回転ギアーケース41の中に収納されているが、それぞれの軸筒部は機体内側に回転ギアーケース41の穴との隙間でシールされて突き出されている。それらの突出部分に回転変位を与えることにより、偏心量eと偏心角度ηが自在に割出される。
【0181】
(7)中央静止翼について、図01、図05、図19、図20、を用いて説明する。
【0182】
中央静止翼50は、中央静止翼支持軸53を回転翼盤4の中央の穴に挿入され、回転翼盤4によってメタルブッシュB54を介して回動自在に支持されているが、支持ユニット3に係止されているので回転円盤4の回転とは無関係に静止している。中央静止翼支持軸53の機体外側の端部には、機体中央側の円盤58と機体外側の惰円盤59の間に複数の中央静止翼フィン57を挟んで一体化した静止翼ケージ56が結合されている。
【0183】
従って、中央静止翼50は、支持ユニット3との間で角度位置を調節することにより、回転翼盤4の回転とは無関係に静止しており、回転角度位置を変えられる。中央静止翼50を用いると、回転翼盤4の前側の要素翼6から流出する後流れを偏向させて後側の要素翼6に流入させられる。
【0184】
ここで、中央静止翼50の作用について、図30〜図42、図47、図48を用いて説明しておく。ここで、解析と説明の容易のために、回転翼1の要素翼6の枚数は上下前後の4枚とし、翼型はキャンバーなしの対象翼型と仮定しておく。
【0185】
回転翼中心軸48には、要素翼6に発生する空気力の上向き成分の総和として回転翼の揚力が、後向き成分の総和として回転翼の抗力(総和が負の場合は推力)が、要素翼6に発生する空気力に起因する回転モーメントの総和として回転翼6の回転モーメントが発生する。
【0186】
回転翼の揚力は、主として取付け角γを変えることにより増減できる。即ち、前下がりに回転させる回転翼では、上死点の要素翼は、流入風速と回転速度のベクトル和の流入速度ベクトルの気流を受ける。揚力は流入速度の2乗に比例するので、上死点付近では、最も大きな揚力が発生する。上死点の要素翼の取付け角γを負の方向に回転してやると、跳ね上げ工程の要素翼も含めて、全ての要素翼の取付け角γが回転した分だけ大きくなる。
【0187】
回転翼の推力(抗力)は、空気の流入速度と回転速度を一定にした場合、遥動角を変えることにより増減できる。空気力は迎角が20°付近で最大となりその後は失速して急に減少するので、空気の流入速度が上がっていない始動時には遥動角を大きくして、前側の要素翼の迎角を20°付近に保ち、空気力を発生する。その後は空気の流入速度と回転速度の上り方を見て、迎角を20°付近に保ちながら遥動角を戻していく。
【0188】
回転翼の回転モーメントは、図32に模式的に示すように、回転翼を前方から後方に貫流する気流を中央静止翼によって切り返すことで調節できる。ここでは、解析と説明の容易のために、翼の抗力係数は揚力係数と比べて十分小さく無視できるとする。この条件では、上下の要素翼では、発生する空気力は揚力のみとなり、要素翼を回転させる成分がなくなるので、回転モーメントの検討では無視できる。
【0189】
中央静止翼がない場合は、前方の要素翼の後流れは斜め下後方に向いその角度で後方の要素翼に流入すると考える。(実際には迎角の100%が後流れの傾斜角になるのではなく、50%程度のようであるが、今は、基本的な現象の解釈が目的なので、大胆に、100%流れ下ると仮定しておく。)このため後方の要素翼の迎角が小さくなり、前側の要素翼に発生する空気力の揚力成分が後側の要素翼の要素翼に発生する空気力の揚力成分より大きくなる。この前後のアンバランスにより、回転翼の回転中心周りに、要素翼の回転半径をモーメントアームとする大きな回転モーメントが発生する。
【0190】
中央静止翼がある場合は、前方の要素翼の後流れは斜め下後方に向かって流出するが、中央静止翼によって適度に切り返して偏向させて水平方向に戻して後方の要素翼に流入させることができる。このときは、後方の要素翼の迎角は前方の要素翼の迎角と等しくなり、前側の要素翼に発生する空気力の揚力成分が後側の要素翼の要素翼に発生する空気力の揚力成分と等しくなる。そのため、前後のアンバランスが無くなり、回転翼の回転中心周りには回転モーメントが発生しなくなる。
【0191】
中央静止翼によって過度に切り返された場合は、空気は斜め上後方に偏向され後方の要素翼に流入する。このため後方の要素翼の迎角は前方の要素翼の迎角より大きくなり、前側の要素翼に発生する空気力の揚力成分が後側の要素翼の要素翼に発生する空気力の揚力成分より小さくなる。そのため、前後のバランスが逆転し、回転翼の回転中心周りに前下げ方向の回転モーメントが発生する。
【0192】
ただし、揚力、抗力、回転モーメントはいずれも要素翼に発生する空気力に起因しており、空気力が要素翼の回転速度と流入速度のベクトル和の2乗に比例するのでこれらの3成分の大きさは、回転速度を変えると、相互に関連しながら複雑に変化する。
【0193】
(8)外側翼について図21、図26、図29、図33〜図38を用いて説明する。
【0194】
ピッチング回転翼1を用いた飛行機では飛行中に回転翼1に回転モーメントが発生する。要素翼6に発生する揚力に起因する回転モーメントは中央静止翼50を制御することによって小さくできるが、要素翼6に発生する抗力によって発生する回転モーメントは、飛行機90を推進する時の駆動トルクの反力であるから、発生は避けられず、別途、バランスを取らねばならない。この機能を担う機構として、水平尾翼67の外側に外側翼66を設け、ピッチング回転方向の傾斜角を調節して揚力を制御することによりバランスを取る方法を採用した。この機能を、別途、設けることにより、従来の飛行機に準じた機構で水平尾翼67とエレベーター65により、飛行状態に起因するピッチング回転に対する静安定性を確保することが可能になる。
【0195】
設計仕様によっては、外側翼66は、元々別の機能でもあるので、水平尾翼67とは別に、最適な位置を選んで独立して設けることも必要になる。
【0196】
(9)上反り角のつけ方について、図21、図26、図29を用いて説明する。
飛行機90のローリング回転に対する静安定性を確保する機構としては、従来の飛行機に準じて、回転翼1を、機体外側を上げる方向に傾斜させて取り付けて上反り角を確保する設計とした。また、回転翼1の下方に下側静止翼70を付ける場合には、この翼にも上反り角を付ける。
【0197】
(10)ヨーイング回転に対する静安定性について、図21、図26、図29を用いて説明する。
【0198】
飛行機90のヨー回転に対する安定化機構としては、従来の飛行機に準じて、垂直尾翼68とラダー69を設定した。主翼の後退翼については、回転翼1のヨー回転コントロール特性が解明されるまで採用を留保した。ただし、回転翼1の下方に下側静止翼70を付ける場合には、この翼には後退角も付ける。
【0199】
(11)回転翼飛行機の現時点での理想モデルである、遊星歯車を省いた簡易型の回転翼X80を用いた飛行機90について、図26〜図29を用いて説明する。
【0200】
遊星歯車を利用して周期的に遥動を加えることを止め、太陽歯車82と反転歯車83と従動歯車84の単純な平行回転歯車列81とする簡易型の回転翼80を設計した。太陽歯車と従動歯車84の歯数を同じにすれば、反転歯車83の歯数とは無関係に従動歯車は1回転中に1回転戻され平行回転する。偏心リング割出機構9も不要になるので構造は大幅に簡略化される。
【0201】
ただし、この様な飛行機は、特殊で、翼を広げ過ぎて機動的な飛行ができなくなったアホウドリに当たると見ている。しかし、その難点を補う方法が見つかれば、駆動機構は単純に越したことはなく、応用範囲も広がろう。確かに殆ど翼を捻らずに飛んでいる鳥の飛行状態も多々見られるので、今の段階では研究対象からは外せない。
【0202】
次に、本発明の機構を用いて作り出せる飛行モードと、それぞれのモードにおける回転翼の作動について原理的に説明する。
【0203】
飛行機は原理的には使われる飛行モードの全てで安定性と操縦性が成り立つように設計されねばならない。そのためには、飛行中の運動を飛行モードに分解し、それぞれの飛行モードで必要な空気力と回転モーメントを発生し、それらを制御できるように設計されなければならない。しかし、鳥類は同じ飛行機構を持ちながら種類により様々に飛行モードを選んでいる。そこで、今は、基本的に必要な機構を見極める段階なので、基本的な飛行モードを仮定し、それらの飛行モードでの基本的な操作と作動について解析し、本発明の機構の有効性を確認した。図30〜図38、図47、図48を用いて説明する。
【0204】
直線飛行に限定すると、飛行プロセスは、離陸準備、離陸、加速(上昇)、水平、滑空、減速(降下)、着陸、停止に分けられる。助走や堕走をせずに静かに水平に舞い上がるアオサギの飛行プロセスを手本に、車両姿勢は常に水平と仮定し、基本的な飛行モードを、次の4つに整理した。従って、水面で助走や制動をするハクチョウの飛行モードは、応用的な飛行モードと考えて説明を割愛する。
【0205】
(a)地上加/減速モード(離陸準備と停止)
(b)舞い上がり/舞い降りモード(離陸と着陸)
(c)空中加/減速モード(加速と減速)
(d)滑空モード
【0206】
これらの4つのモードについて、以下に説明をする。
【0207】
(a)地上加/減速モードの作動について、図33〜図35を用いて原理的に説明する。
地上では機体が停止しているので、起動時の空気の流入速度はゼロであるが、回転翼の運転によって流入気流は徐々に加速され、舞い上がりに必要な回転速度と流入速度が得られ、駆動系に回転エネルギーが蓄えられる。起動時には、遥動角を最大にして回転翼を回転させ、前方から空気を吸い込み後方に送り出し、その後、遥動角を徐々に戻しながら回転速度を上げ、回転翼を貫流する空気流を加速し、舞い上がりに必要な気流速度と回転速度を確保する。この間、機体は地面に支えられており、踏ん張りが効くので、その範囲内で、大きな回転モーメントが発生しても耐えられる。
【0208】
この間、中央静止翼は後方の要素翼が大きめの負の迎角を取り、背面で空気を送り出すように調節される。即ち、前方の要素翼の斜め後下方向の後流れをそのまま、または、更に、下方に偏向させて後方の要素翼に流入させる。
【0209】
舞い上がりに必要な気流速度と回転速度が得られた状態で、負荷が増大して回転速度が低下した時に駆動トルクを増大して元の速度に戻すフィードバック制御を掛ける。気流速度を低下させないように監視しながら、遥動角を戻して要素翼の迎角を下げて必要な迎角増大マージンを確保し、舞い上がり待機状態とする。
【0210】
舞い降り後は、制動から停止までの間、流入気流の低下に伴う大きな回転モーメントが発生しても、地面に踏ん張って耐えられるので、舞い上がり前と逆の動作で遥動角と回転速度を徐々に戻して停止する。
【0211】
ここで、舞い上がり前に、地上で回転翼を前から後へ貫通する気流を作り出す過程について、図33〜図38の試算を参考にして定性的に推定しておく。これに似た課程はヘリコプターがローターを起動して吹き下し流れを発生するときにも起こされている。
【0212】
取付け角をゼロにし、揺動角を80°にして、低回転速度で前下げ方向で始動回転すると、下死点の要素翼は後方から風を受けるので抗力は前向きに発生するが、迎角が小さいので小さい。上死点の要素翼は前方から風を受け、抗力は後向に発生するが、これも小さい。前方の要素翼は下から風を受けて空気力を発生するが、その上向き成分は小さいが、前向き成分は大きい。後側の要素翼は上から風を受けて空気力を発生するが、その下向き成分は小さいが、前向き成分は迎角を持った要素翼の揚力になるので大きい。即ち、このような条件では、上下と前後の要素翼によって生ずる、回転翼を前上がりに回転させる回転モーメントは小さい。揚力も小さい。しかし、前向きの空気力は大きい。その反力で機体は前方に押されるが、駐機ブレーキを掛けて踏ん張れる範囲であれば前進はしない。その反動で、回転翼は前方から空気を吸い込み後方に押し出す。
【0213】
揺動角を80°にしたまま同じ回転速度で回転を続行すると、上死点と下死点の要素翼には水平方向に僅かな抗力しか発生しない。後方の要素翼は前方の要素翼の起した後流れを受けて空気力を発生するが、流入角が揺動角に等しくなると迎角がゼロになるので空気力の発生はなくなる。その状態になるまでは回転翼を前後に通過する空気の流速は上がり続ける。即ち、この間では、上下と前後の要素翼によって、回転翼を前下げ回転させる回転モーメントと揚力と抗力が過渡的に生ずるが、それらは、大きくはなっていかない。前向きの空気力によって機体は前方に押されるが、回転翼の前方から後方に押し出される空気の流速は、更に加速されて一定値に落ち着く。
【0214】
続いて、揺動角を70°にして同じ回転速度で回転すると、同じ作用が繰り返されて、回転翼の前方から吸い込まれ後方に押し出される空気の流速は、更に加速されて一定値に落ち着く。
【0215】
その後も遥動角を段階的に小さくしていくと前翼と後翼の迎角が小さくなり、流れをそれ以上加速できなくなる。この時の回転翼は揚力型回転ファンとでも言うべき作用で、効率よく、空気を前方から吸い込み後方に押し出している。
【0216】
(b)舞い上がり/舞い降りモードの作動について、図33〜図38を用いて原理的に説明する。
【0217】
舞い上がりには機体重量を支え上昇させる揚力を発生する必要がある。また、空中ではピッチング回転に対する踏ん張りが効かないので、回転翼に発生する回転モーメントは水平尾翼の側端に取り付けた外側翼の調節で制御できる範囲に押さえなければならない。従って、舞い上がりの瞬間には複雑で機敏でデリケートなモード切換え操作が必要となる。
【0218】
舞い上がり待機状態から取付け角を上げて要素翼の迎角を大きくして、回転翼に大きな揚力を発生し、機体を舞い上がらせる。回転速度は、所定の舞い上がり待機速度を基準に調節して、上昇加速度によって変える。
【0219】
この時、中央静止翼は前側の要素翼に発生する空気力と前後対称な空気力を後方の要素翼に発生させるように、大きな正の迎角を取れるように調節する。即ち、前方の要素翼の後流れを切り返して上向きに偏向させて後方の要素翼に流入させる。
【0220】
前後の要素翼に発生する推力は互いに引き合うことになるが、垂直に上昇させるためにはそれらのバランスをとることが必要になる。このバランスは、遥動角と中央静止翼の切り替えし角を同時に変えることで調節できる。
【0221】
後側の要素翼から流出した空気は拡散し、減速しながら、水平尾翼の側端に付けた外側翼に流入するので、その傾斜角の調節によって、回転翼に発生する回転モーメントに起因する機体のピッチング回転が抑制される。
【0222】
上昇後、上昇と前後移動とピッチング回転の3つの速度が全て0になるよう制御することにより空中停止(ホバリング)が可能となる。
【0223】
減速飛行後は、空中停止状態に戻すと、舞い上がりと逆の操作で舞い降りることができる。
【0224】
(c)空中加/減速モードの作動について、図33〜図38を用いて原理的に説明する。
【0225】
空中での加速には揚力を発生して飛行機を空中に支えながら、前向きに推力を発生する必要がある。また、空中ではピッチング回転に対する踏ん張りが効かないので、機体に発生する回転モーメントは水平尾翼とその側端に付けた外側翼の調節で制御できる範囲に押さえなければならない。しかし、飛行機は既に空中に舞い上がっているので、空中加速モードへの移行は、比較的スムーズに行える。
【0226】
飛行機の上昇は、空中停止状態を基準にして、取付け角リードで回転速度、遥動角、中央静止翼の切り返し角と外側翼の傾斜角を互いに関連付けながら調節して揚力を増大することにより可能となる。
【0227】
飛行機を前進させるには、前後の要素翼に発生する推力のバランスを崩して、前側の要素翼の推力を後側の要素翼の反対方向の推力より大きくすることが必要になる。または、後側の要素翼の推力をゼロまたは前向きの推力にすることも、回転モーメントを過大にしない範囲であればできる。これは、遥動角リードで、中央静止翼の切り返し角、回転速度、遥動角、取付け角と外側翼の傾斜角を互いに関連付けながら調節することにより可能となる。
【0228】
この時、要素翼の遥動角は大きめにし、前側の要素翼に発生する空気力を大きくし、推力成分を増大させる。また、中央静止翼は、前側の要素翼の後流を後方の要素翼に迎角がゼロまたは少しマイナスで流入するように調節し、推力のバランスを変えてやる。面白いことに、この時、中央静止翼自身にも前向きに推力が発生する。中央静止翼を回転翼の中心に対して前方に取り付けると、切り返し角を付けた時に前下げ方向の回転モーメントが発生する。この回転モーメントは、回転翼に発生する回転モーメントを相殺する方向であり、利用できる。
【0229】
ただし、推力は、飛行機に発生するピッチング回転モーメントを過大にしない範囲に制御されねばならない。後側の要素翼から流出した空気は拡散し、減速しながら水平尾翼の側端に付けた外側翼に流入するので、そこに発生する揚力を調節することによって、飛行機の駆動に伴って発生するピッチング回転は抑制される。
【0230】
以上により、上昇、前後移動、ピッチング回転の3つの速度を制御しながら空中で加速できる。
【0231】
空中での減速は、上記と逆の動作で制御できる。回転速度を落としてゆくと、推力と揚力が同時に下がってくるが、遥動角を調節して迎角をとり戻して降下速度を調節しながら減速降下できる。または、回転速度を維持または上げながら、迎角を小さくして揚力と抗力を同時に下げて、飛行速度と高度を下げて減速降下することもできる。
【0232】
目標とする飛行速度と高度が得られたら、推力と揚力を水平飛行の維持に必要なレベルにまで下げるように回転速度と遥動角を調節して巡航飛行に移る。翼面荷重を、翼型の性能設計値として無理のない、100kg-w/m2と仮定すると、1m2の翼面積の要素翼を4枚持った回転翼を左右に搭載した回転翼飛行機は、800kg-w程度の揚力を発生できる。
【0233】
(d)滑空モードの作動について、図35、図38を用いて原理的に説明する。
【0234】
滑空中の回転翼の回転速度は、停止からフリー回転の間で、制動により回転速度を変えられる。操作系の電源が生きていれば、回生ブレーキ(ブレーキ発電)を掛けて、回転翼の迎角の制御や機体の姿勢の制御も可能である。回転翼の回転を止めた状態での飛行は、原理的に、複葉飛行機の滑空と同じである。
【0235】
実際に、揚力の大きさ、揚力の作用点、飛行機の重心、水平尾翼の位置、水平尾翼の容量などを調整すると、従来のグライダーに準じた回転翼を固定した滑空状態が設計できる。
【0236】
従来のグライダーでは、主翼で揚力を発生し、エレベーターで機体の姿勢角を制御して滑空する。ピッチング回転に対する静安定性は水平尾翼によって得ている。これに対して、ピッチング回転翼飛行機では、回転翼の要素翼と中央静止翼で揚力を発生し、エレベーターで機体の姿勢角を制御して滑空する。ピッチング回転に対する静安定性は水平尾翼によって得る。
【0237】
要素翼と中央静止翼に発生する空気力によって、回転翼の中心周りに発生する回転モーメントは、水平尾翼の外側にピッチング回転角度位置を調節できるように取り付けられた外側翼に発生する空気力によって相殺されるように制御される。
【0238】
従来の飛行機では、主翼の上反り角によってロール安定性が図られているが、ピッチング回転翼飛行機では、回転翼を傾斜させて取り付けることにより上反り角を得ている。
【0239】
最後に、基本的に往復運動である羽ばたき運動を回転運動に置き換えたために生じたもう一つの設計準備課題として、回転翼の回転方向の問題に触れておく。図43〜図46を用いて説明する。
【0240】
滑空中の回転翼の回転方向については、回転翼のブレーキを解除し、フリーに回転させて滑空させることもできる。この時の回転方向は、中央静止翼の切り返し角を調節することにより、前下がり回転から前上がり回転に切り替えることができ、フリー回転の速度を調節することもできる。
【0241】
フリーに回転する場合は要素翼に発生する空気力が変わり、回転翼の揚力も増大する。オートジャイロやヘリコプターのオートローテーションのような飛行の可能性が期待されるが、鳥の飛行モードにはない現象でもあり、今の初期の机上検討段階ではその可能性は定性的にしか推定できていない。操作方法を選ぶことにより一方向回転にできるか、どのような滑空制御ができるかは、飛行機の安全性と信頼性設計の基本に係るので、当面の最も興味ある研究課題の一つである。
【0242】
本回転翼では、ヘリコプターのように空気を下に押し出してその反動で揚力を得るのでなく、前側から吸い込んだ空気を後斜め下方に偏向させる反動で揚力を得ている。この原理的特長があるので回転翼の下側に下側静止翼を取り付けることが許される。この翼には上反り角や後退角も付けることができるので、滑空時の揚力を増大し、静安定性の向上にも寄与させられる。
【0243】
また、この下側静止翼は、レイアウト上、および、商品性上極めて大きなメリットを生む。即ち、この下側静止翼の中は、従来の飛行機の主軸で実用性が実証されているように、前輪の収納、燃料の搭載、バッテリーの格納などに利用でき、その分、居住空間を拡大できる。また事故時のクラッシュでは衝突エネルギーを大きく吸収させることもできる。
【0244】
回転翼を駆動するトルクと推力の関係を定量的に理解するために、揚力をゼロにして、抗力により発生する空気力と回転モーメントの関係を試算した。一例を図36〜38に示す。
【0245】
なお、本発明に係る回転翼は、以上、説明した実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【産業上の利用可能性】
【0246】
ビジネス開発の観点からは、ピッチング回転翼飛行機は、回転翼だけで揚力と推力の両方を発生し、空中静止も可能な飛行機であるが、従来の飛行機やヘリコプターに代わるものではなく、新しいビジネス分野を切り開く材料となりそうである。
【0247】
ヘリコプターのホバリングでは空気は上から吸い込まれ下に押し出される。これに対して、ピッチング回転翼飛行機のホバリングでは、空気は前から吸い込まれ斜め後下方に吐き出される。この状態は、流れるプールで流れを作りながら泳ぐのに似ている。従って、離着陸時の砂塵の巻き上げ方はヘリコプターと比べてかなり違ったものになる。
【0248】
ヘリコプターは、大きな垂直上昇力と等方向性の水平移動能力という、ピッチング回転翼飛行機には真似のできないリフト能力を持っている。しかし、軽量級の空飛ぶタクシーにすればヘリコプターとは一味違う便利な飛行機となるかも知れない。ヨーコントロールとロールコントロールとジャイロ効果に苦しみながら現在の飛行技術を確立したヘリコプターを思うと、やや複雑ではあるが、鳥に近い飛行原理を持つこの飛行機の実用化は、比較的容易かもしれない。
【0249】
無線操縦のホビー用や作業用飛行ロボットへの応用も有望であろう。この場合は、人が乗らず、使用場所を限定でき、製品安全上や航空法規上の制約も少ないので、制御技術と並行して機構と構造の開発を進めれば商品化の道は早めに開かれるかもしれない。
【0250】
ホビー用としては、従来、弾性膜を張った羽ばたき翼の鳥ロボットが商品化されている。しかし、弾性膜翼では、バタバタして翼型が定まらないので、安定した精度の良い飛行を機械的に再現することは難しいと思われる。本発明は剛性のある複数の要素翼を機械的に回転させ、少し多めの補助翼を用いて操作する機構となっているため、制御ファクターが多く、しかもそれらを複雑に関連付けて操作しなければならない。それをシミュレートしてマイコンを開発してゆくのはかなり難しいタスクとなるが、克服されれば、鳥のように自由に飛行させられる模型飛行機が多様に開発されるようになる。
【0251】
商品開発の観点からは、設定目標の有人鳥ロボットの実用化までには最短で20年は掛かる。基礎設計は、自動車を基準に、安全、重量とコスト、燃費とエミッション、騒音性能、デザインについて性能目標を設定して開発を進めることになろう。オートローテーション機能とその制御能力が安全性のカギを握っている。重量は半減したい。ボディー系の強度メンバーは全て高張力アルミ板にし、ボディーパネルは全て樹脂化し、シャシー系のメンバーはCFRP 主体にする。軟構造化を進め、動的挙動を解析し、弾性変形や振動特性を設計に確りと織り込むことになる。コストは2倍以下に押さえたい。最近の自動車のエコ対応への挑戦は先行技術開発として大いに期待できる。排気騒音の点からジェットエンジンは使えない。エンジンは、最初はバイオ燃料のロータリーハイブリッドとなるのかもしれない。それまでには、ロータリーエンジンのローターとエキセントリックシャフトは中空かセラミックにしたい。タイヤ音は無くなるが、風切り音が発生する。しかし、翼型も機体形状もどこまでも鳥に近づけていけるので空力性能の向上を図りながら風切り音は低減してゆける。外観デザインとしては、鳥をイメージしたコンパクトで美しい形が原理的に約束されている。
【0252】
ピッチング回転翼飛行機は僅かな助走で離陸し、そのまま飛行状態に入ることができる。従って、将来は、ピッチングコントロールの難しさを克服し、回転翼の制御方法を確立し、機体の静安定と操縦性を確立し、離陸準備、急速上昇、水平飛行、旋回、滑空、制動などの飛行モードをスムーズに切り換えて飛行し、精度良くピンポイントで着陸できるようにしたい。
【0253】
本発明は、今は、ヘリコプターに近い水平維持飛行をする飛行機としているが、鳥や従来の飛行機のように飛行方向に機首を向け、違和感なく自然なフィーリングで加速度を感じて飛行することが可能となるように配慮して機構の設計を進めている。鳥は空中で空気力と重力と慣性力のバランスを取りながら姿勢角を自由に変えて飛行しているが、将来は、鳥ロボットの胸に乗り込んだドライバーが人鳥一体となって自由に姿勢を変えて自在に操縦できるようにしたい。
【0254】
技術開発の観点からは、ピッチング回転翼を用いた飛行機の開発は、まだ、設計原理を解明し設計理論を準備している段階である。次の段階では、ラジコン名人達に教えてもらってオリジナルラジコン模型の開発を楽しみながら、操縦システムの基本設計にすすみたい。これまでに分かった機能・性能・構造要件とレイアウト要件を踏まえて、遥動機構を省略または簡略化した単純な平行回転翼を試作し、フリー滑空させてみることから着手したい。
【0255】
遊星歯車を用いた差動機構により要素翼を周期的に遥動させる機構は、自動車で言えば、駆動系のディファレンシャルギヤーを利用した動力配分技術に相当する。それに対して、中央静止翼と外側翼を用いて回転翼に発生する回転モーメントをバランスさせて機体のピッチング回転の静安定性を確保しようとする機構は、シャシー系のサスペンション技術に相当しよう。次の段階では操縦システムの原理設計に進むが、ローリング回転とヨーイング回転に対する静安定性を確保するための機構の確認が先となろう。シャシー系のステアリング、タイヤ、ダンパーに相当する技術領域が、未だ発明されずに残されていると感じているが、それはまだ見えていない。そこまでゆければボディーの原理構造も見えてこよう。従って、自動車のエンジン、ボディー(艤装、内外装を含む)に相当する技術領域については、今はまだ絵に描いた餅の状態である。
【0256】
偏心リング割出機構と遊星歯車を用いた偏心-遥動変換機構はかなり複雑になったが、今のところ比較すべき代替案は見つかっていない。ヘリコプターのスワッシュプレートに相当する機構なので、信頼性の確保には多くの困難が予想されるので機体や回転翼とは別にユニットレベルのプロジェクトを立てて開発を進めたい。
【0257】
回転ドラムケース内のオイル潤滑システムの設計は、具体的に試作テストでドライ潤滑の限界を見極めながら進めるべきであろう。また、将来、実用化される段階では、オイル潤滑を必要とする高性能飛行機とは別に、オイル潤滑を必要としない回転翼飛行機の開発も進めるべきである。ドライ潤滑の回転翼の開発は、実用性の高い量産機の範囲を広げるので、実用上最も価値ある技術開発テーマの一つである。
【0258】
要素翼を駆動するベルトやチェーンには、現在の通常の技術では張りを調整する機構が必要である。しかし、回転するディスクに組み込むので、この機構は不要にしたい。このテーマは、将来、材料技術と製造技術の革新でブレークスルーすべき、当面、見通しを得たい最優先の技術開発課題の一つである。
【符号の説明】
【0259】
1 回転翼
2 回転ユニット
3 支持ユニット
4 回転翼盤
5 回転翼端盤
6 要素翼
7 要素翼軸
8 歯車列
9 偏心リング割出機構
10 ボディー
11 太陽歯車
12 従動歯車
13 内歯歯車
14 リテーナリング
15 遊星歯車
16 反転歯車
17 反転ピニオン
18 翼ピニオン
19 遊星歯車ジョイントピン
20 偏心リング
21 ローラーアーム
22 ジョイントピン
23 ローラー
24 偏心-遥動変換機構
25 差動機構
26 太陽歯車軸
27 ランナーリング
28 追従要素翼
29 タイミングベルト
30 内側用アンギュラー玉軸受
31 外側用アンギュラー玉軸受
32 通しボルト
33 ボルト
34 タングA
35 ツバ付ボス
36 リングナット
37 エンドケース
38 エンドリング
39 トルクチューブ
40 タングB
41 回転ギアーケース
42 タイミングベルトA
43 タイミングベルトB
44 中間ピニオンA
45 中間ピニオンB
46 取り付け台
47 要素翼ケージ
48 回転翼中心軸
49 スラストパッキン
50 中央静止翼
51 メタルブッシュA
52 メタルブッシュC
53 中央静止翼支持軸
54 メタルブッシュB
55 メタルブッシュD
56 静止翼ケージ
57 中央静止翼フィン
58 円盤
59 楕円盤
60 内側偏心ディスク
61 外側偏心ディスク
62 中継歯車
63 駆動歯車
64 偏心ディスク転がり軸受
65 エレベーター
66 外側翼
67 水平尾翼
68 垂直尾翼
69 ラダー
70 下側静止翼
71 下側静止翼エキステンション
72 回転翼盤X
73 通しボルトA
74 ボルトB
75 ツバ付ブッシュA
76 ツバ付ブッシュB
77 エンドケース
78 リングナット
79 ツバ付ボスA
80 回転翼X
81 歯車列X
82 太陽歯車X
83 反転歯車X
84 従動歯車X
85 回転翼端盤X
86 要素翼X
87 トルクチューブ
88 エンドリング
89 機体
90 飛行機
e 偏心量
η 偏心角度
α 要素翼の傾斜角
β 偏心軸傾斜角
γ 取付け角
δ 要素翼の遥動角
ζ リテーナリングの遥動角
Vt 飛行速度
Vr 要素翼の公転速度
θ 要素翼の公転角度
【特許請求の範囲】
【請求項1】
機体外側の端に内歯歯形を形成した翼ピニオンの穴に、機体内側から挿入した通しボルトを、機体内側の端に翼ピニオンの内歯歯形と回動不能にスキマ勘合する外歯歯形を形成し、機体外側の端に扁平な突起部分を持つ要素翼軸を貫通させ、更に、要素翼の心金を形成する中空長穴断面を有する管であるトルクチューブを貫通させ、機体内側の端にトルクチューブに勘合する扁平な突起部分を持ち、機体外側の端にベアリングの外輪を勘合させる穴を形成したエンドケースの機体内側の端に形成されたメネジ部に締結して一体化する結合構造としたことを特徴とする平行回転翼を利用した流体機械。
【請求項2】
円筒面の稜線を回転軸とする複数の要素翼軸を回転翼盤上に配置した回転ユニットを支持ユニットの筒部に回動自在に勘着した回転翼において、それぞれの要素翼軸が、支持ユニットに連結されて静止している太陽歯車の周りを、太陽歯車と噛み合いそれぞれの要素翼軸に回転角度を伝達する歯車列によって、公転しながら同じ回転角度自転して戻るようにした平行回転翼において、支持ユニットの筒部の外筒側に太陽歯車と偏心リングを割出す機構を勘着し、筒部の内筒側に、太陽歯車と噛み合う複数の歯車列を取り付けた回転翼盤を回動自在に勘着し、各歯車列の中の複数の遊星歯車を回動自在に勘着したリテーナリングから突出されたアーム部分の先端部にジョイントピンで回動自在に勘着されたローラーを偏心リングの内筒面に接触させて、太陽歯車の中心と偏心リングの中心とローラーの中心とリテーナリングの中心とで4節リンクを形成し、回転翼盤の回転に伴って発生するリテーナリングの遥動回転を遊星歯車の遥動回転に変換し、歯車列の中で末端の翼ピニオンの遥動回転に変換し、回転円盤が1回転する間に1回転戻る翼ピニオンの回転に遥動回転を付加する機構を設けたことを特徴とする平行回転翼を利用した流体機械。
【請求項3】
外歯歯車を持った駆動歯車を太陽歯車軸に勘合させ、その外歯歯車と噛み合う中継歯車をオフセットさせて回動自在に勘着し、外周にオフセットした軸受軸面を形成した内側偏心ディスクを勘着し、中継歯車と噛み合う内歯歯車を持ち、外筒部に偏心リングを形成した外側偏心ディスクを内側偏心ディスクの軸受軸面と回動自在に結合する軸受穴面に勘着させた偏心リング割出機構とし、内側偏心ディスクと駆動歯車の軸筒をそれぞれに回転させることにより偏心リングの偏心方向と偏心量を任意に割出せる機構を設けたことを特徴とする回転翼を利用した流体機械である。
【請求項4】
偏心リングの内径側に、偏心リングの内径からローラーの外径の2倍を差し引いた外径を持ったランナーリングを、スベリ隙間を持たせて回動自在に勘着したことを特徴とする請求項1、2、3に記載の回転翼を利用した流体機械である。
【請求項5】
太陽歯車と噛み合う歯車列によって駆動されて回転する要素翼に加えて、それらの要素翼と連結されて回転する追従要素翼を追加して要素翼の枚数を増やした回転翼を取付けたことを特徴とする請求項1、2、3、4に記載の回転翼を利用した流体機械である。
【請求項6】
支持ユニットの筒部の穴に回動自在に勘着された回転翼盤の中心の穴に回動自在に勘着された中央静止翼の軸筒の機体外側の端に、内盤と外盤の間に要素翼とほぼ同じ長さの翼を挟んで一体化した静止翼ケージを固定し、軸筒の機体内側の端を回転させて回転角度位置を調節できる中央静止翼を設けたことを特徴とする請求項1,2,3、4、5に記載の回転翼を利用した流体機械。
【請求項7】
水平尾翼の機体外側の端に機体内側に向けて明けられた穴に、軸部を回動自在に勘着した外側翼を設けたことを特徴とする請求項1,2,3,4,5、6に記載の回転翼を利用した流体機械。
【請求項8】
静止翼を回転翼の下方に機体から外側に突き出して装着したことを特徴とする請求項1,2,3,4,5,6、7に記載の回転翼を利用した流体機械。
【請求項1】
機体外側の端に内歯歯形を形成した翼ピニオンの穴に、機体内側から挿入した通しボルトを、機体内側の端に翼ピニオンの内歯歯形と回動不能にスキマ勘合する外歯歯形を形成し、機体外側の端に扁平な突起部分を持つ要素翼軸を貫通させ、更に、要素翼の心金を形成する中空長穴断面を有する管であるトルクチューブを貫通させ、機体内側の端にトルクチューブに勘合する扁平な突起部分を持ち、機体外側の端にベアリングの外輪を勘合させる穴を形成したエンドケースの機体内側の端に形成されたメネジ部に締結して一体化する結合構造としたことを特徴とする平行回転翼を利用した流体機械。
【請求項2】
円筒面の稜線を回転軸とする複数の要素翼軸を回転翼盤上に配置した回転ユニットを支持ユニットの筒部に回動自在に勘着した回転翼において、それぞれの要素翼軸が、支持ユニットに連結されて静止している太陽歯車の周りを、太陽歯車と噛み合いそれぞれの要素翼軸に回転角度を伝達する歯車列によって、公転しながら同じ回転角度自転して戻るようにした平行回転翼において、支持ユニットの筒部の外筒側に太陽歯車と偏心リングを割出す機構を勘着し、筒部の内筒側に、太陽歯車と噛み合う複数の歯車列を取り付けた回転翼盤を回動自在に勘着し、各歯車列の中の複数の遊星歯車を回動自在に勘着したリテーナリングから突出されたアーム部分の先端部にジョイントピンで回動自在に勘着されたローラーを偏心リングの内筒面に接触させて、太陽歯車の中心と偏心リングの中心とローラーの中心とリテーナリングの中心とで4節リンクを形成し、回転翼盤の回転に伴って発生するリテーナリングの遥動回転を遊星歯車の遥動回転に変換し、歯車列の中で末端の翼ピニオンの遥動回転に変換し、回転円盤が1回転する間に1回転戻る翼ピニオンの回転に遥動回転を付加する機構を設けたことを特徴とする平行回転翼を利用した流体機械。
【請求項3】
外歯歯車を持った駆動歯車を太陽歯車軸に勘合させ、その外歯歯車と噛み合う中継歯車をオフセットさせて回動自在に勘着し、外周にオフセットした軸受軸面を形成した内側偏心ディスクを勘着し、中継歯車と噛み合う内歯歯車を持ち、外筒部に偏心リングを形成した外側偏心ディスクを内側偏心ディスクの軸受軸面と回動自在に結合する軸受穴面に勘着させた偏心リング割出機構とし、内側偏心ディスクと駆動歯車の軸筒をそれぞれに回転させることにより偏心リングの偏心方向と偏心量を任意に割出せる機構を設けたことを特徴とする回転翼を利用した流体機械である。
【請求項4】
偏心リングの内径側に、偏心リングの内径からローラーの外径の2倍を差し引いた外径を持ったランナーリングを、スベリ隙間を持たせて回動自在に勘着したことを特徴とする請求項1、2、3に記載の回転翼を利用した流体機械である。
【請求項5】
太陽歯車と噛み合う歯車列によって駆動されて回転する要素翼に加えて、それらの要素翼と連結されて回転する追従要素翼を追加して要素翼の枚数を増やした回転翼を取付けたことを特徴とする請求項1、2、3、4に記載の回転翼を利用した流体機械である。
【請求項6】
支持ユニットの筒部の穴に回動自在に勘着された回転翼盤の中心の穴に回動自在に勘着された中央静止翼の軸筒の機体外側の端に、内盤と外盤の間に要素翼とほぼ同じ長さの翼を挟んで一体化した静止翼ケージを固定し、軸筒の機体内側の端を回転させて回転角度位置を調節できる中央静止翼を設けたことを特徴とする請求項1,2,3、4、5に記載の回転翼を利用した流体機械。
【請求項7】
水平尾翼の機体外側の端に機体内側に向けて明けられた穴に、軸部を回動自在に勘着した外側翼を設けたことを特徴とする請求項1,2,3,4,5、6に記載の回転翼を利用した流体機械。
【請求項8】
静止翼を回転翼の下方に機体から外側に突き出して装着したことを特徴とする請求項1,2,3,4,5,6、7に記載の回転翼を利用した流体機械。
【図1】


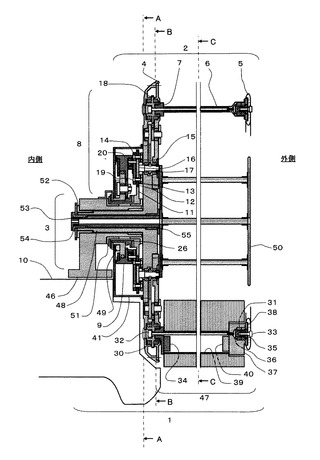
【図2】
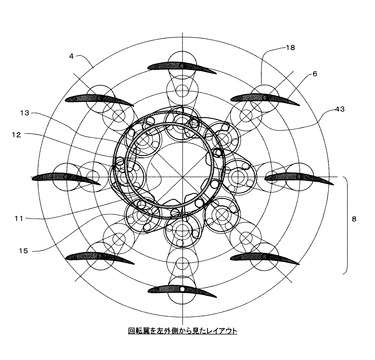
【図3】
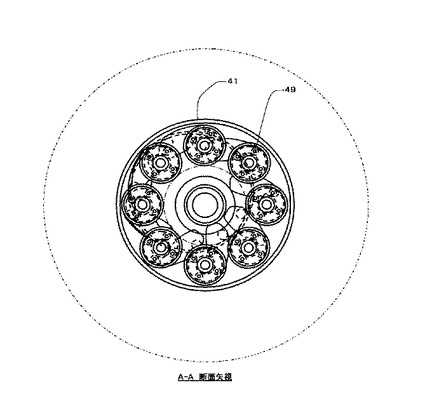
【図4】

【図5】

【図6】

【図7】
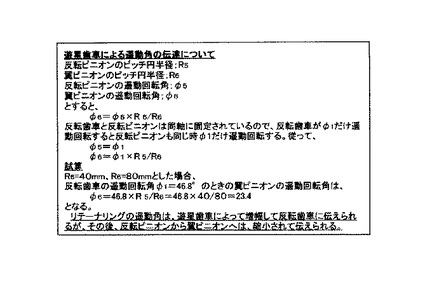
【図8】
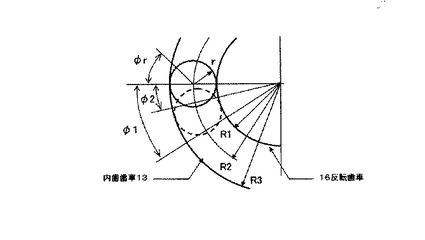
【図9】

【図10】
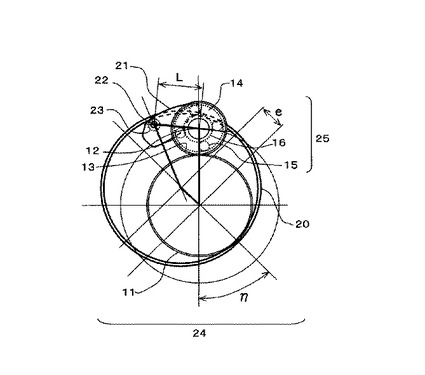
【図11】
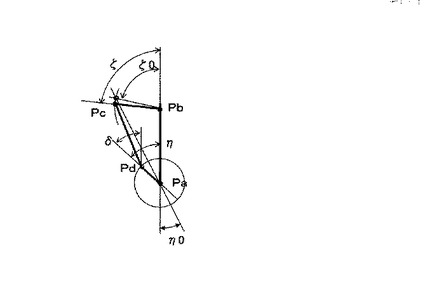
【図12】
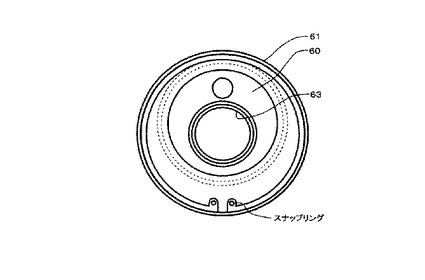
【図13】
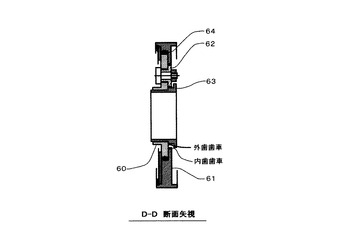
【図14】
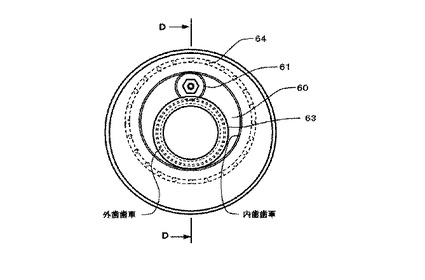
【図15】
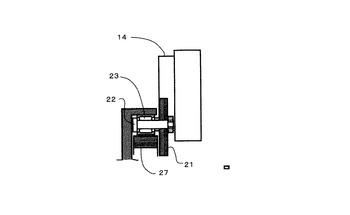
【図16】
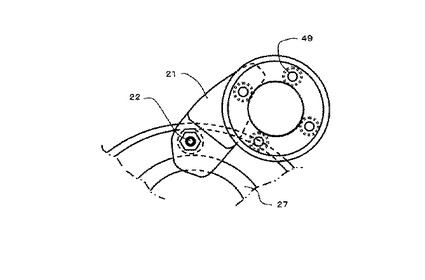
【図17】

【図18】
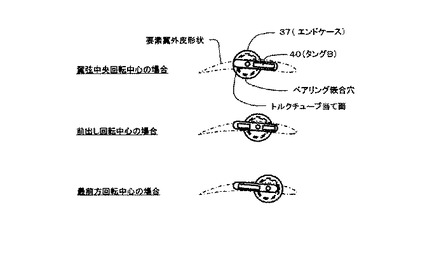
【図19】
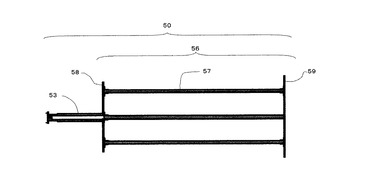
【図20】
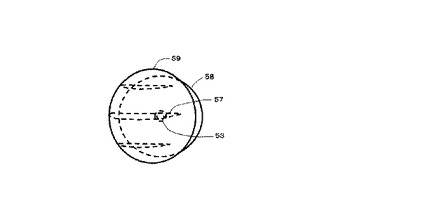
【図21】
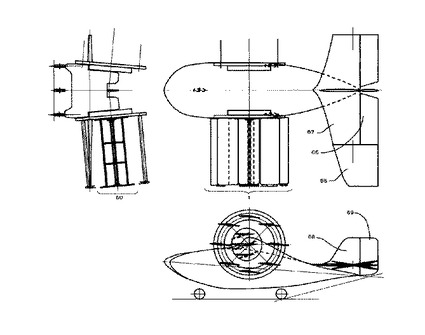
【図22】
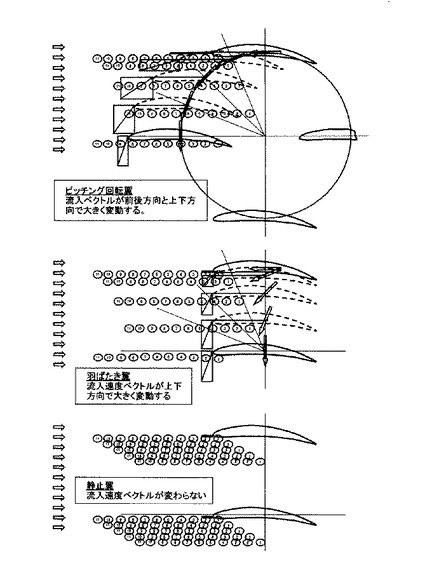
【図23】
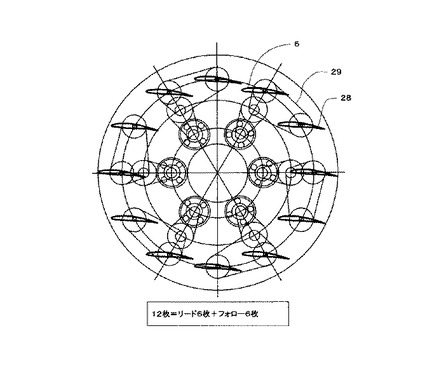
【図24】
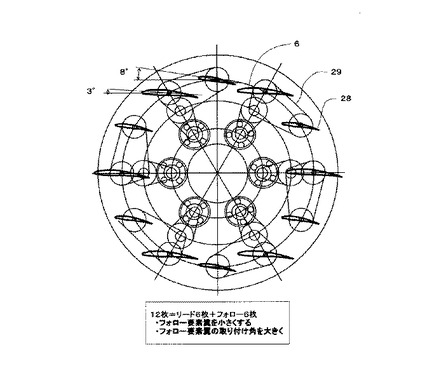
【図25】
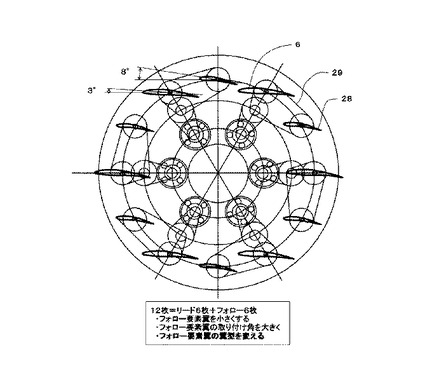
【図26】
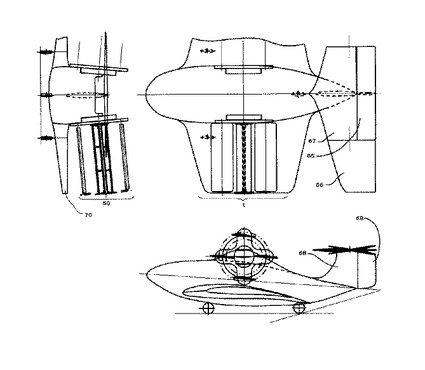
【図27】

【図28】
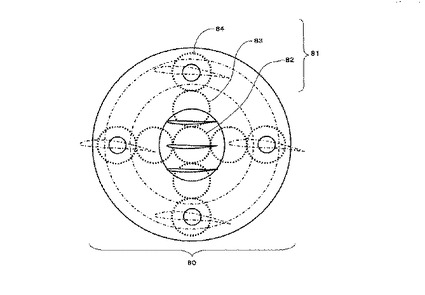
【図29】
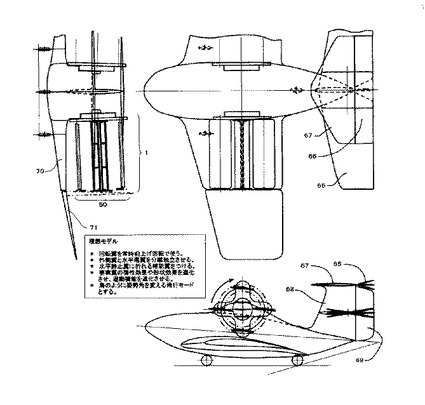
【図30】
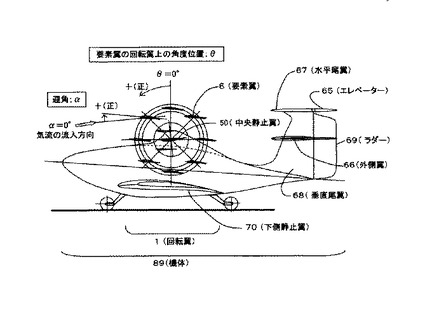
【図31】
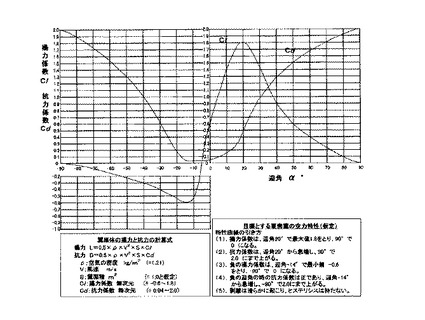
【図32】
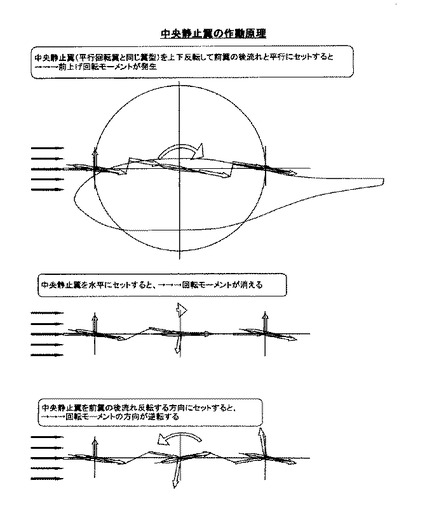
【図33】
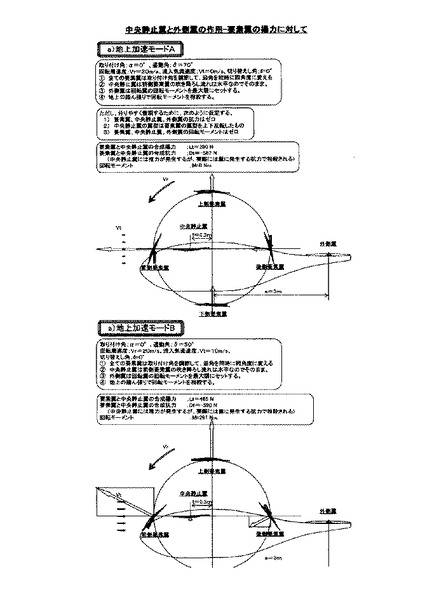
【図34】

【図35】
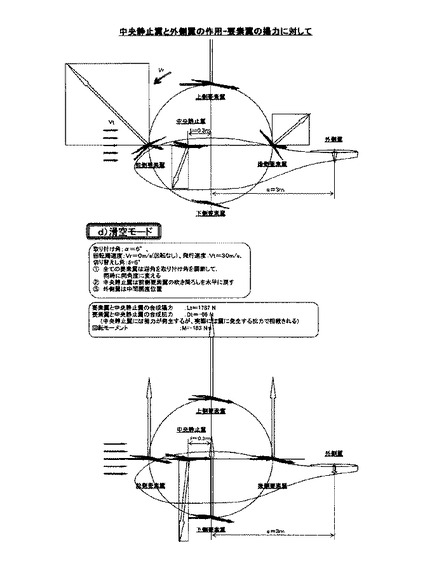
【図36】
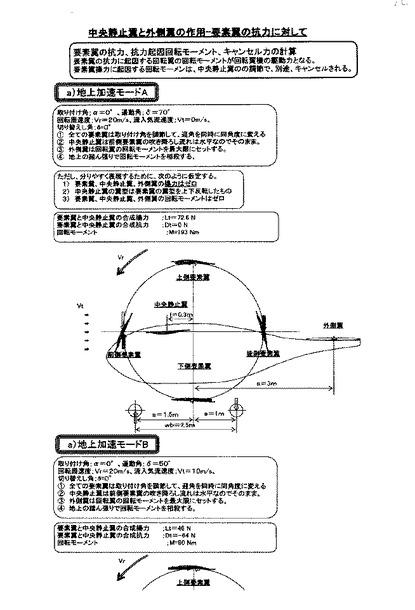
【図37】

【図38】
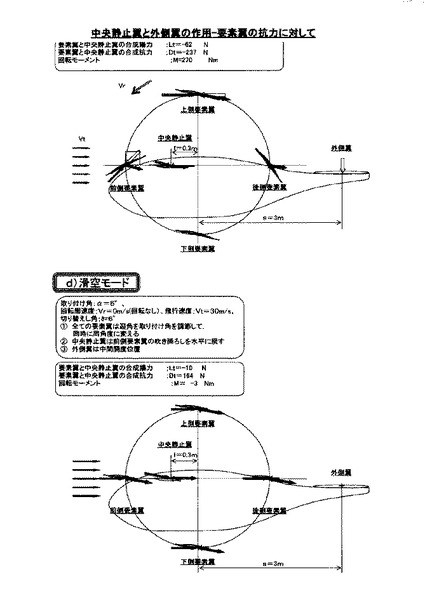
【図39】

【図40】
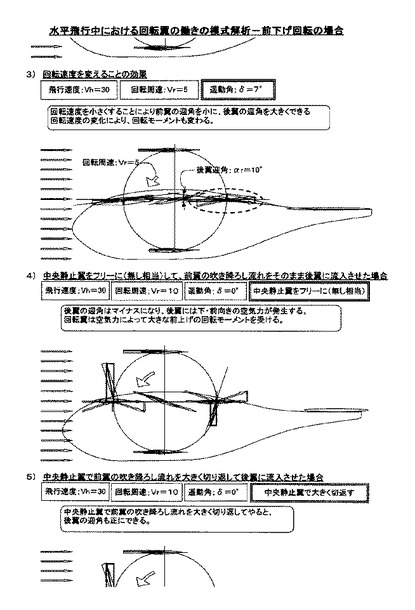
【図41】
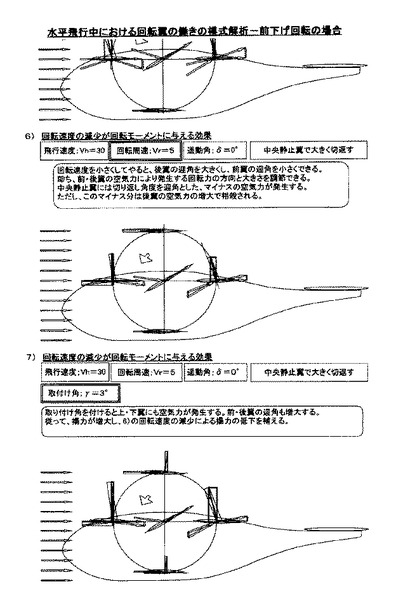
【図42】
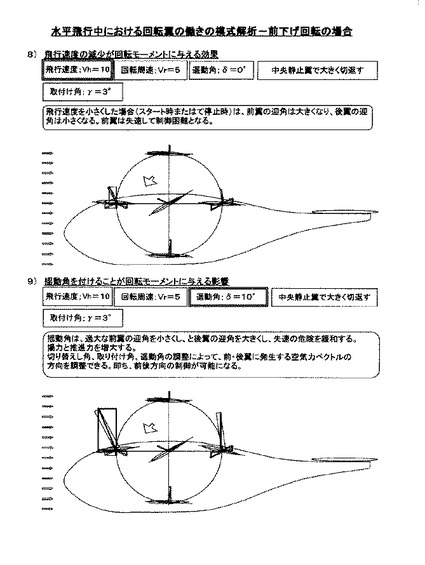
【図43】

【図44】

【図45】

【図46】
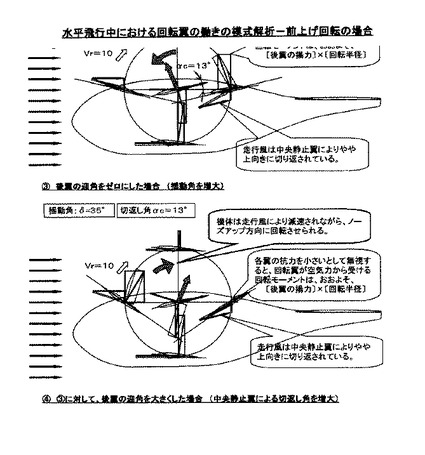
【図47】
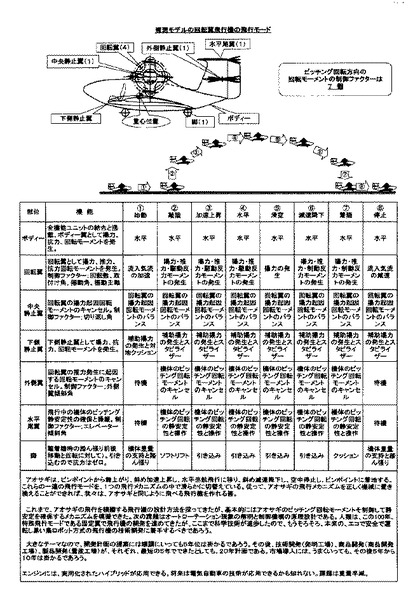
【図48】
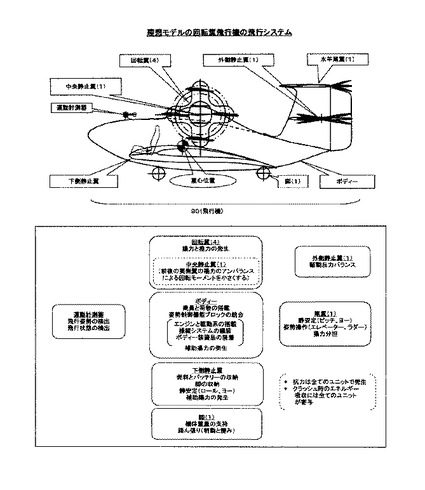
【図49】
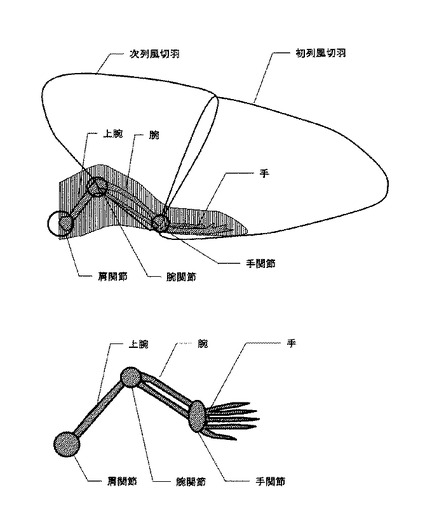
【図50】

【図51】
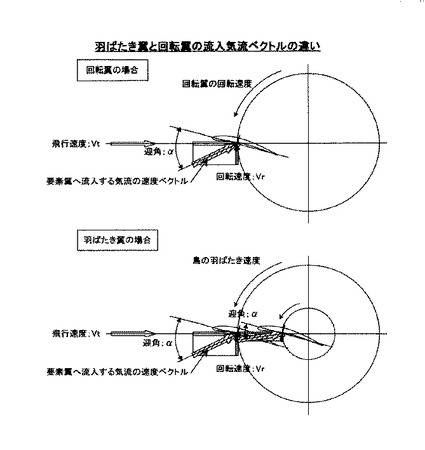
【図52】

【図53】
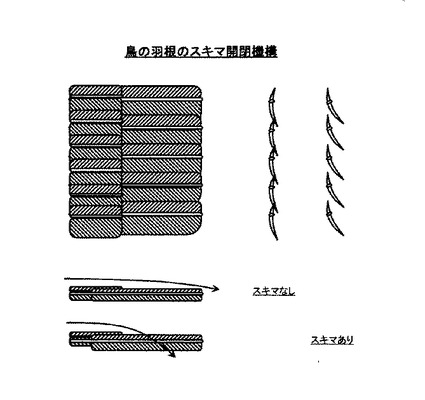
【図54】
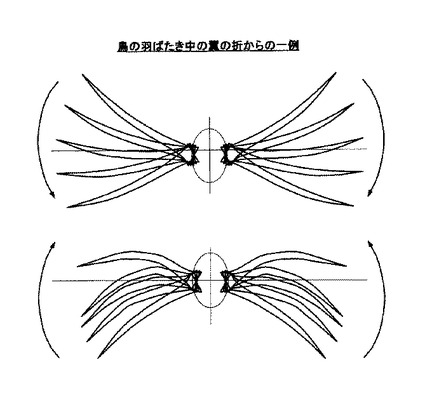
【図55】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図52】
【図53】
【図54】
【図55】
【公開番号】特開2011−11614(P2011−11614A)
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願番号】特願2009−156789(P2009−156789)
【出願日】平成21年7月1日(2009.7.1)
【出願人】(307023616)
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願日】平成21年7月1日(2009.7.1)
【出願人】(307023616)
[ Back to top ]