
運転支援システム
【課題】演算処理の負荷を軽減すること。
【解決手段】複数の運転支援情報を外部から受信する通信装置10と、各運転支援情報の中から運転支援サービスで使用される運転支援情報を選別する運転支援情報選別装置30と、運転支援情報選別装置30で選択された前記運転支援サービスで使用される運転支援情報に基づいて当該運転支援サービスを実行する運転支援装置40と、を備えること。ここで、通信装置10で受信した運転支援情報が格納される記憶装置20を設け、運転支援情報選別装置30は、記憶装置20に格納されている運転支援情報の中から運転支援サービスで使用される運転支援情報を選別し、これにより選択された前記運転支援サービスで使用される運転支援情報を運転支援装置40に送信する。
【解決手段】複数の運転支援情報を外部から受信する通信装置10と、各運転支援情報の中から運転支援サービスで使用される運転支援情報を選別する運転支援情報選別装置30と、運転支援情報選別装置30で選択された前記運転支援サービスで使用される運転支援情報に基づいて当該運転支援サービスを実行する運転支援装置40と、を備えること。ここで、通信装置10で受信した運転支援情報が格納される記憶装置20を設け、運転支援情報選別装置30は、記憶装置20に格納されている運転支援情報の中から運転支援サービスで使用される運転支援情報を選別し、これにより選択された前記運転支援サービスで使用される運転支援情報を運転支援装置40に送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、外部から受信した運転支援情報に基づいて運転支援サービスを実行する運転支援システムに関する。
【背景技術】
【0002】
従来、1台の車両において複数の運転支援サービスを行う運転支援システムが知られている。例えば、下記の特許文献1には、信号灯色に応じた運転支援サービスと他の移動体(他車、歩行者、自転車)に応じた運転支援サービスとを行う運転支援システムが開示されている。この運転支援システムにおいては、信号灯色が赤色であり信号停止位置での停止を促す運転支援サービスを行う場合に、他の移動体に基づいた運転支援サービスを実行させないようにして、不要な運転支援サービスの実行を抑制している。また、下記の特許文献2には、自車の車速が所定速度未満のときに、自車周辺の所定領域に車車間通信の受信指向性を向かせる一方、自車の車速が所定速度以上のときに、車車間通信の受信指向性を無指向性とし、自車の車速が上がるにつれて広範囲の他車の情報を取得できるようにする技術が開示されている。尚、下記の特許文献3には、車車間通信で検出した他車を地図データ上にマッチングする際、制御対象となる他車の選定領域を自車の道路情報(道路種別、道路形状等)と運転情報(車速、ウインカ状態等)とに基づいて可変設定し、制御対象として不要な他車を排除する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−293440号公報
【特許文献2】特開2008−077348号公報
【特許文献3】特開2011−095929号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、運転支援サービスを行う際の基となる運転支援情報(他車や信号情報等)については、必ずしも常に一定数が受信されるわけではなく、少数しか受信されないときもあれば、多数が受信されるときもある。そして、多くの運転支援情報が受信された場合には、その数が多くなるほど運転支援サービスに係る演算処理の負荷が高くなっていく。例えば、上記特許文献1に記載の運転支援システムにおいては、受信した他の移動体の数が多くなるほど、その移動体毎に運転支援サービスに係る演算処理を行わなければならず、その演算処理の負荷が高くなる。また、上記特許文献2に記載の運転支援システムにおいては、自車の車速が上がるにつれて広範囲の他車の情報が受信されるので、車速の上昇に伴い運転支援サービスに係る演算処理の負荷が高くなっていく可能性がある。
【0005】
そこで、本発明は、かかる従来例の有する不都合を改善し、演算処理の負荷の軽減を図ることが可能な運転支援システムを提供することを、その目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成する為、本発明は、複数の運転支援情報を外部から受信する通信装置と、前記各運転支援情報の中から運転支援サービスで使用される運転支援情報を選別する運転支援情報選別装置と、前記運転支援情報選別装置で選択された前記運転支援サービスで使用される運転支援情報に基づいて当該運転支援サービスを実行する運転支援装置と、を備えることを特徴としている。
【0007】
ここで、前記通信装置で受信した運転支援情報が格納される記憶装置を設け、前記運転支援情報選別装置は、前記記憶装置に格納されている前記運転支援情報の中から前記運転支援サービスで使用される運転支援情報を選別し、これにより選択された前記運転支援サービスで使用される運転支援情報を前記運転支援装置に送信することが望ましい。
【0008】
また、前記運転支援情報選別装置で選択された運転支援情報が格納される記憶装置を設け、前記運転支援装置は、前記記憶装置に格納されている運転支援情報に基づいて前記運転支援サービスを実行することが望ましい。
【0009】
前記運転支援装置が複数の前記運転支援サービスを実行するものである場合又は1つ以上の前記運転支援サービスを実行する前記運転支援装置が複数設けられている場合、前記運転支援情報選別装置は、前記運転支援サービスの種別毎に前記運転支援情報の選別を行うことが望ましい。
【0010】
前記運転支援情報選別装置は、実行対象となっている前記運転支援サービスの種別毎に前記運転支援情報の選別を行うことが望ましい。
【0011】
また、前記運転支援装置が複数の前記運転支援サービスを実行するものである場合又は1つ以上の前記運転支援サービスを実行する前記運転支援装置が複数設けられている場合、前記記憶装置に前記運転支援サービス毎の記憶領域を設ける又は夫々の前記運転支援サービス毎に前記記憶装置を備えることが望ましい。
【0012】
また、前記運転支援情報選別装置は、選択された前記運転支援情報を自車の走行情報又は走行環境の内の少なくとも一方に応じて更に選別することが望ましい。
【0013】
また、前記運転支援情報選別装置は、選択された前記運転支援情報の情報量に応じて更に当該運転支援情報の選別を行うことが望ましい。
【発明の効果】
【0014】
本発明に係る運転支援システムは、外部から受信した運転支援情報を運転支援サービスに基づいて選別し、これにより選択された運転支援情報に基づいて運転支援サービスを実行する。これが為、この運転支援システムに依れば、受信した運転支援情報の中から不要なものを排除して運転支援サービスを行うことができるので、演算処理に掛かる負荷を軽減することができる。
【図面の簡単な説明】
【0015】
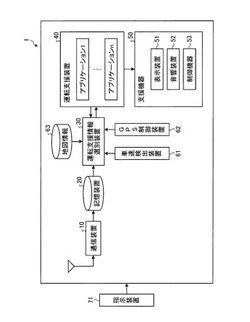
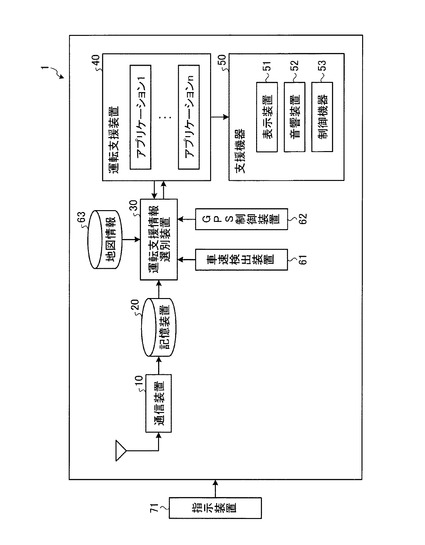
【図1】図1は、本発明に係る運転支援システムの実施例の構成を示す図である。
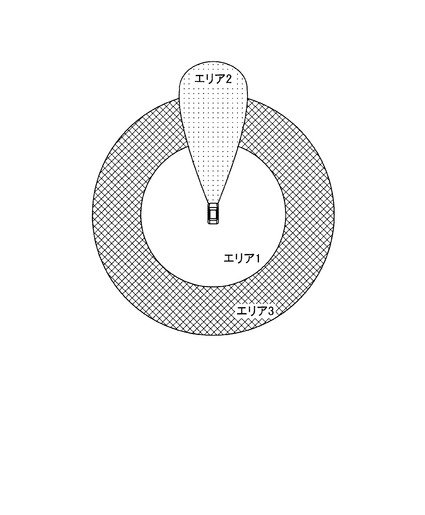
【図2】図2は、一般道の選別対象領域について説明する図である。
【図3】図3は、自動車専用道の選別対象領域について説明する図である。
【図4】図4は、実施例の運転支援システムの演算処理動作について説明するフローチャートである。
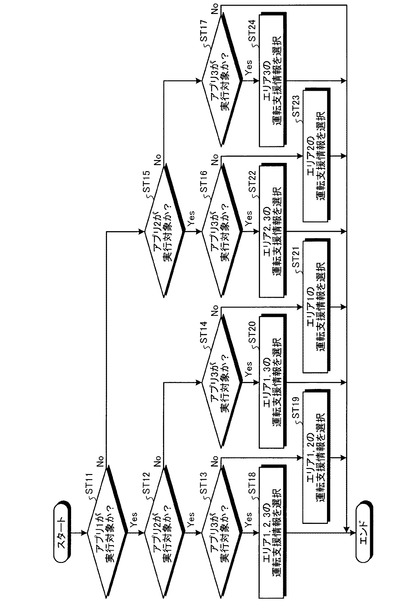
【図5】図5は、実施例の運転支援システムにおける一般道の運転支援情報の選別処理動作について説明するフローチャートである。
【図6】図6は、実施例の運転支援システムにおける自動車専用道の運転支援情報の選別処理動作について説明するフローチャートである。
【図7】図7は、実施例の運転支援システムにおける他の構成を示す図である。
【図8】図8は、本発明に係る運転支援システムの変形例1の構成を示す図である。
【図9】図9は、変形例1の運転支援システムにおける一般道の運転支援情報の選別及び格納の処理動作について説明するフローチャートである。
【図10】図10は、変形例1の運転支援システムにおける自動車専用道の運転支援情報の選別及び格納の処理動作について説明するフローチャートである。
【図11】図11は、本発明に係る運転支援システムの変形例3の構成を示す図である。
【図12】図12は、変形例4の運転支援システムの演算処理動作について説明するフローチャートである。
【発明を実施するための形態】
【0016】
以下に、本発明に係る運転支援システムの実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
【0017】
[実施例]
本発明に係る運転支援システムの実施例を図1から図12に基づいて説明する。
【0018】
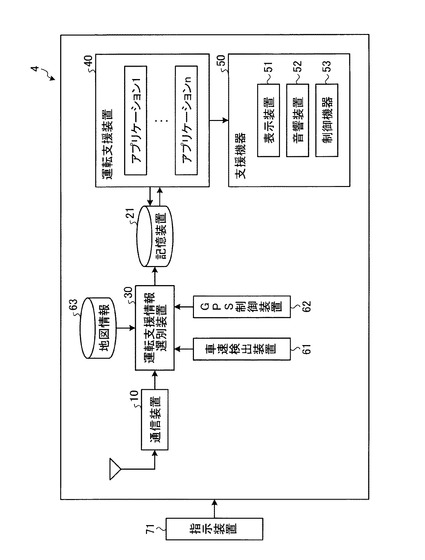
図1の符号1は、本実施例の運転支援システムを示す。
【0019】
この運転支援システム1は、外部から運転支援情報を受信する通信装置10を備える。この通信装置10は、少なくとも外部から運転支援情報を受信することができればよいのだが、自車の運転支援情報を外部へと送信できるように構成されていてもよい。この通信装置10は、所謂車車間通信、路車間通信、車路車間通信等によって、運転支援情報を外部から受信する。
【0020】
その運転支援情報とは運転支援サービスを行う際に用いられる情報のことであり、後述する運転支援装置40は、その運転支援情報に基づいて運転支援サービスを実行する。例えば、車車間通信や車路車間通信においては、他車情報(他車の位置情報、他車における車速等の走行情報、他車における方向指示器の向き等の車両挙動情報など)が運転支援情報に該当する。ここで例示している他車情報は、各車両が安全に走行する為の所謂安全系の運転支援サービス、燃費性能やエミッション性能の悪化を抑える為の所謂エコ系の運転支援サービス等に利用される。また、路車間通信においては、他車情報、歩行者や自転車の位置情報、道路や交差点の線形情報、信号機の信号灯色情報等が運転支援情報に該当する。これらの運転支援情報についても、安全系やエコ系の運転支援サービス等に利用される。
【0021】
運転支援システム1には、通信装置10で受信した運転支援情報を格納する記憶装置20が設けられている。その記憶装置20には、受信した全ての運転支援情報が格納される場合もあれば、受信した運転支援情報の内の一部が格納される場合もある。その格納されている運転支援情報は、例えば交差点を通過するなどして不要になった場合、記憶装置20から削除される。
【0022】
また、この運転支援システム1には、記憶装置20に格納されている運転支援情報の中から運転支援サービスで使用される運転支援情報を選別する運転支援情報選別装置30が設けられている。その運転支援情報選別装置30は、記憶装置20に格納されている全て又は一部の運転支援情報の中から選別を行う。この運転支援システム1においては、その選別された運転支援サービスで使用される運転支援情報が運転支援装置40に渡されて、後述する支援機器50が制御される。
【0023】
運転支援情報選別装置30は、この運転支援システム1で提供される運転支援サービスが1種類だけであれば、その運転支援サービスの実行の為に必要とされる運転支援情報(つまり運転支援サービスで使用される運転支援情報)を選択する。一方、この運転支援システム1で複数種類の運転支援サービスが提供される場合には、その夫々の運転支援サービスに応じた運転支援情報が選択される。例えば、運転支援情報選別装置30は、その全ての運転支援サービスで使用される運転支援情報を記憶装置20の運転支援情報の中から選択する。また、この運転支援情報選別装置30は、その全ての運転支援サービスの中で後述する指示装置71の操作に伴い実行対象になっている運転支援サービスにおいて使用される運転支援情報を選択してもよい。ここで選択されなかった記憶装置20の運転支援情報は、不要なものとして記憶装置20から削除する。
【0024】
ここで、通信装置10からは、広範囲に渡る運転支援情報が受信される。その一方で、運転支援サービスで用いる運転支援情報は、その全ての範囲に存在しているものを必ずしも必要とはしない。そして、選別対象の運転支援情報が存在している領域(以下、「選別対象領域」と云う。)については、自車位置との関係で運転支援サービス毎に特定することができる。
【0025】
例えば、自車の周囲360度の他車の動きを監視しながら行う安全系の運転支援サービスにおいては、自車の進行方向に拘わらず、周囲360度の他車情報が必要とされる。これが為、この様な運転支援サービスで使用される運転支援情報を選択する場合には、例えば、図2に示す周囲360度に渡る選別対象領域1(エリア1)を設定すればよい。この選別対象領域1については、この運転支援サービスの支援範囲に基づいて自車を中心とする領域を設定すればよい。尚、この運転支援サービスにおいては、自車位置等の自車情報についても運転支援情報として利用される。
【0026】
また、同じ安全系の運転支援サービスであっても、前方の交差点を安全に通過する為の運転支援サービスの場合には、自車の前方の他車情報や交差点の信号灯色情報を必要とするが、自車の後方の他車情報等を必要としない。車速制御することで誘導経路上の各交差点を青色の信号灯色で走行させ続ける様なエコ系の運転支援サービスにおいても同様である。これが為、この様な運転支援サービスで使用される運転支援情報を選択する場合には、例えば、図2に示す前方のみの選別対象領域2(エリア2)を設定すればよい。この選別対象領域2については、この運転支援サービスの支援範囲に基づいて自車の前方の領域や自車の進行方向に対する左右の領域を設定すればよい。
【0027】
また、所謂快適系の運転支援サービスや利便系の運転支援サービスにおいては、自車の周囲360度の広範囲の他車情報や施設情報等に基づいて運転支援サービスを行うことが好ましい。これらの運転支援サービスとは、例えば、他車の運転者との間で情報の授受を行ったり、自車の周辺の施設情報(店舗情報や行楽施設情報等)を自車の運転者に提供したりするものである。これが為、この様な運転支援サービスで使用される運転支援情報を選択する場合には、例えば、図2に示す周囲360度に渡る選別対象領域3(エリア3)を設定すればよい。この例示では、安全系の運転支援サービスよりも広範囲の他車情報や施設情報等を対象にしているので、選別対象領域1よりも選別対象領域3の方が広くなっている。
【0028】
運転支援情報選別装置30には、運転支援サービスに応じた選別対象領域を設定させ、この選別対象領域に基づいて記憶装置20の運転支援情報を選別させる。これにより、選別対象領域から外れている他車や信号機等に関わる運転支援情報が除外され、この選別対象領域内の他車等に関わる運転支援情報が選択される。その選別対象領域の設定は、この運転支援システム1で複数種類の運転支援サービスが提供される場合、その全ての運転支援サービスの選別対象領域を各々設定してもよく、その全ての運転支援サービスの中で実行対象になっているものの選別対象領域のみを設定してもよい。また、その選別は、設定された選別対象領域毎に1つずつ行ってもよく、設定された全ての選別対象領域を対象にして一度に行ってもよい。運転支援情報選別装置30は、この様にして、記憶装置20に格納されている運転支援情報の中から運転支援サービスで使用される運転支援情報を選択することができる。従って、運転支援装置40は、その選択された運転支援情報のみを対象にして運転支援サービスを行うことができるので、その実行時の演算処理に係る負担が軽減される。
【0029】
ここで、選別対象領域(選別対象領域1,2,3)は、自車の車速が高くなるほど領域を広げることが望ましい。車速の上昇と共に広範囲の運転支援情報を取得することで、運転支援サービスがより実効あるものになるからである。従って、運転支援情報選別装置30には、自車の走行情報における車速情報を取得させ、この車速情報に応じた選別対象領域を設定させて、運転支援情報の選別を行わせることが好ましい。この場合、運転支援情報選別装置30は、運転支援サービスと車速とに応じた選別対象領域を設定し、この選別対象領域に基づいて記憶装置20の運転支援情報を選別する。その車速情報については、車速センサや車輪速センサ等の車速検出装置61の検出信号に基づいて取得すればよい。
【0030】
更に、この運転支援情報選別装置30は、その運転支援情報の選別を行う際に、自車の走行環境についても考慮することが望ましい。ここで例示する自車の走行環境とは、少なくとも走行中の道路情報に基づいて判断されたものであって、自車が高速道路等の自動車専用道を走行しているのか、これ以外の一般道を走行しているのかについて表したものである。従って、この運転支援情報選別装置30には、自車の走行中の道路情報に基づいて、自車がどの様な種別の道路を走行しているのかについて判断させる。自車が走行している道路情報については、自車位置情報と地図情報とに基づいて把握できる。自車位置情報は、自車がカーナビゲーションシステムを搭載しているのであれば、GPS(Global Positioning System)制御装置62の把握している自車位置情報を利用すればよい。また、地図情報は、カーナビゲーションシステムの地図情報63を利用すればよい。
【0031】
自動車専用道においては、一般道と比較すると、車速が高く、また、横方向からの他車の進入もない。これが為、自動車専用道では、車両前後方向の他車等に関する運転支援情報が一般道よりも広範囲で必要になる一方、車両横方向の他車等に関する運転支援情報が一般道よりも狭い範囲のもので事足りる。従って、例えば、前述した図2に例示した選別対象領域(選別対象領域1,2,3)が一般道のものとした場合、自動車専用道の選別対象領域(選別対象領域4,5,6)は、一般道のものよりも車両前後方向に広く且つ車両横方向に狭くなる(図3)。尚、その選別対象領域4,5,6は、各々選別対象領域1,2,3に対応したものであり、同種の運転支援サービスに該当するものである。
【0032】
この場合、運転支援情報選別装置30は、例えば、自車の走行環境に応じた選別対象領域と運転支援サービスに応じた選別対象領域とを設定する。そして、この運転支援情報選別装置30は、自車の走行環境に応じた選別対象領域に基づいて記憶装置20の運転支援情報を選別し、これにより選択された選別対象領域内の運転支援情報を運転支援サービスに応じた選別対象領域に基づいて更に選別する。運転支援情報選別装置30は、この様にして、記憶装置20に格納されている運転支援情報の中から運転支援サービスで使用されるものを自車の走行環境をも考慮した上で選択することができる。従って、運転支援装置40は、その自車の走行環境に応じて更に選別された運転支援情報のみを対象にして運転支援サービスを行うことができるので、その実行時の演算処理に係る負担が更に軽減される。
【0033】
ここで、運転支援情報選別装置30には、自動車専用道であっても、自車の走行情報における車速情報に応じた選別対象領域(選別対象領域4,5,6)を設定させてもよい。例えば、混雑時には、車速が低下するので、選別対象領域における車両前後方向を狭めてもよい。また、自動車専用道においては、他車が側道から合流してくる場合もある。これが為、運転支援情報選別装置30には、合流地点において選別対象領域における車両横方向を拡げさせてもよい。
【0034】
運転支援装置40は、運転支援情報に基づいて運転支援サービスを実行する。図1に例示する運転支援装置40は、運転支援サービスの種類毎の複数のアプリケーションN(N=1,2,…,n)を有するものである。この運転支援装置40は、実行対象となっている運転支援サービスで使用される運転支援情報を運転支援情報選別装置30から受け取ると、その運転支援情報を実行対象の運転支援サービスのアプリケーションNに渡し、この運転支援情報に基づいて運転支援サービスを実行する。
【0035】
その運転支援サービスは、運転支援情報に基づいて支援機器50を制御することで実行される。例えば、前述した交差点における安全系の運転支援サービスの場合、運転支援装置40は、交差点における他車や歩行者等の位置情報や信号灯色情報などに基づいて警告情報を生成し、これを運転者に伝える。ここで、その伝達方法としては、視覚を刺激するものや聴覚を刺激するものがある。従って、支援機器50としては、例えば、その警告情報を車室内に表示して運転者に伝える表示装置51、その警告情報を音響情報で示して運転者に伝える音響装置52等のHMI(Human Machine Interface)機器がある。また、前述した車速制御によるエコ系の運転支援サービスの場合、運転支援装置40は、誘導経路上の各交差点の信号灯色情報や自車の位置情報及び車速情報等に基づいて、夫々の交差点を信号灯色が青色の状態で走行し続けるように自車の車速を制御する。従って、この場合には、エンジン(図示略)のスロットル弁の制御アクチュエータやブレーキ装置の制動力制御用のアクチュエータ等の車両の制御機器53が支援機器50となる。
【0036】
以上示した運転支援システム1は、車室内の指示装置71を介して作動する。その指示装置71は、乗員によって操作され、運転支援サービスの開始を指示する為のものである。この指示装置71は、例えば、切替スイッチの如き形態のものであってもよく、カーナビゲーションシステム等のモニタ上で指示を行う形態のものであってもよい。
【0037】
この運転支援システム1の演算処理動作について図4−6のフローチャートに基づき説明する。尚、ここでは、運転支援システム1に3種類の運転支援サービス(アプリケーション1,2,3)が用意されているものとする。そして、選別対象領域1,2,3は、夫々にアプリケーション1,2,3に対応しており、また、選別対象領域4,5,6についても夫々にアプリケーション1,2,3に対応しているものとする。
【0038】
運転支援情報選別装置30は、例えばイグニッションオン信号や指示装置71からの指示信号が検出されたときに、記憶装置20に運転支援情報が残っていれば、この格納されている運転支援情報を削除する(ステップST1)。尚、その後、記憶装置20には、通信装置10で受信した運転支援情報が格納される。
【0039】
そして、運転支援情報選別装置30は、自車が自動車専用道を走行しているのか否かの判定を行う(ステップST2)。その結果、運転支援情報選別装置30は、一般道を走行していれば、一般道用に運転支援情報の選別を行い(ステップST3)、自動車専用道を走行していれば、自動車専用道用に運転支援情報の選別を行う(ステップST4)。以下、そのステップST3,ST4の一例について詳述する。
【0040】
運転支援情報選別装置30は、一般道用の運転支援情報の選別を行う際、図5のフローチャートに示す様に、例えば指示装置71からの指示信号に基づいてアプリケーション1(アプリ1)が実行対象になっているのか否かを判定する(ステップST11)。運転支援情報選別装置30は、アプリケーション1が実行対象であれば、次にアプリケーション2(アプリ2)が実行対象になっているのか否かを判定し(ステップST12)、このアプリケーション2も実行対象であれば、アプリケーション3(アプリ3)が実行対象になっているのか否かの判定を行う(ステップST13)。
【0041】
また、運転支援情報選別装置30は、ステップST12でアプリケーション2が実行対象になっていないと判定した場合にも、アプリケーション3が実行対象になっているのか否かを判定する(ステップST14)。また、運転支援情報選別装置30は、ステップST11でアプリケーション1が実行対象になっていないと判定した場合、アプリケーション2が実行対象になっているのか否かを判定し(ステップST15)、その結果の如何に拘わらず、アプリケーション3が実行対象になっているのか否かの判定を行う(ステップST16,ST17)。
【0042】
運転支援情報選別装置30は、ステップST13で肯定判定され、3種類の運転支援サービス(アプリケーション1,2,3)が全て実行対象になっていると判った場合、選別対象領域1,2,3(エリア1,2,3)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域1,2,3に該当する運転支援情報を選択する(ステップST18)。一方、この運転支援情報選別装置30は、ステップST13で否定判定され、アプリケーション1,2の運転支援サービスが実行対象になっていると判った場合、選別対象領域1,2(エリア1,2)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域1,2に該当する運転支援情報を選択する(ステップST19)。
【0043】
また、運転支援情報選別装置30は、ステップST14で肯定判定され、アプリケーション1,3の運転支援サービスが実行対象になっていると判った場合、選別対象領域1,3(エリア1,3)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域1,3に該当する運転支援情報を選択する(ステップST20)。一方、この運転支援情報選別装置30は、ステップST14で否定判定され、アプリケーション1の運転支援サービスが実行対象になっていると判った場合、選別対象領域1(エリア1)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域1に該当する運転支援情報を選択する(ステップST21)。
【0044】
また、運転支援情報選別装置30は、ステップST16で肯定判定され、アプリケーション2,3の運転支援サービスが実行対象になっていると判った場合、選別対象領域2,3(エリア2,3)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域2,3に該当する運転支援情報を選択する(ステップST22)。一方、この運転支援情報選別装置30は、ステップST16で否定判定され、アプリケーション2の運転支援サービスが実行対象になっていると判った場合、選別対象領域2(エリア2)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域2に該当する運転支援情報を選択する(ステップST23)。
【0045】
また、運転支援情報選別装置30は、ステップST17で肯定判定され、アプリケーション3の運転支援サービスが実行対象になっていると判った場合、選別対象領域3(エリア3)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域3に該当する運転支援情報を選択する(ステップST24)。一方、この運転支援情報選別装置30は、ステップST17で否定判定された場合、どの運転支援サービスも実行対象になっていないので、運転支援情報の選別を行わずに本演算処理を終わらせる。
【0046】
運転支援情報選別装置30は、自動車専用道用の運転支援情報の選別を行う際、図6のフローチャートに示す様に、どのアプリケーションが実行対象になっているのか否かを判定する(ステップST31−ST37)。このステップST31−ST37の演算処理は、前述したステップST11−ST17の演算処理と各々同じである。
【0047】
運転支援情報選別装置30は、ステップST33で肯定判定され、3種類の運転支援サービス(アプリケーション1,2,3)が全て実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域4,5,6(エリア4,5,6)に該当する運転支援情報を選択し(ステップST38)、ステップST33で否定判定され、アプリケーション1,2の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域4,5(エリア4,5)に該当する運転支援情報を選択する(ステップST39)。
【0048】
また、運転支援情報選別装置30は、ステップST34で肯定判定され、アプリケーション1,3の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域4,6(エリア4,6)に該当する運転支援情報を選択し(ステップST40)、ステップST44で否定判定され、アプリケーション1の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域4(エリア4)に該当する運転支援情報を選択する(ステップST41)。
【0049】
また、運転支援情報選別装置30は、ステップST36で肯定判定され、アプリケーション2,3の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域5,6(エリア5,6)に該当する運転支援情報を選択し(ステップST42)、ステップST36で否定判定され、アプリケーション2の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域5(エリア5)に該当する運転支援情報を選択する(ステップST43)。
【0050】
また、運転支援情報選別装置30は、ステップST37で肯定判定され、アプリケーション3の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域6(エリア6)に該当する運転支援情報を選択し(ステップST44)、ステップST37で否定判定された場合、どの運転支援サービスも実行対象になっていないので、運転支援情報の選別を行わずに本演算処理を終わらせる。
【0051】
運転支援情報選別装置30は、この様にして選択した運転支援情報に基づいて運転支援サービスを実行する。
【0052】
以上示した様に、この運転支援システム1においては、受信した運転支援情報が運転支援サービスや自車の走行環境等に基づいて選別されるので、その運転支援サービスを不要な運転支援情報を選り分けながら実行する必要がなくなり、運転支援サービスを行うに際しての演算処理の負荷を軽減させることができる。従って、この運転支援システム1に依れば、運転支援サービスを実行する際の応答性を向上させることができ、更に、その演算処理を担う機器やプログラムの簡素化を図ることができる。
【0053】
ここで、この実施例では運転支援サービス(アプリケーション)毎に選別対象領域を設定しているが、例えば、運転支援サービスの種別(安全系、エコ系等)と選別対象領域との間に相関関係がある場合には、運転支援サービスの種別毎に選別対象領域が設定されるようにしてもよい。その相関関係とは、或る種別の運転支援サービスであれば、そのサービス内容の違いに拘わらず、例えば図2の選別対象領域1内の運転支援情報が必要とされる場合のことを云う。従って、前述した自車の周囲360度の他車の動きを監視しながら行う安全系の運転支援サービスと交差点を安全に通過する為の安全系の運転支援サービスの様に、そのサービス内容の違いによって選別対象領域が異なる場合、運転支援情報選別装置30には、運転支援サービスの種別毎に選別対象領域を設定させるよりも、運転支援サービス(アプリケーション)毎に選別対象領域を設定させることが望ましい。
【0054】
[変形例1]
前述した実施例の運転支援装置40は、提供される運転支援サービスに対応させたアプリケーションを有するものとして例示した。ここで、運転支援サービスは、所望の運転支援サービスの実行が可能な携帯端末等の外部運転支援装置を車両に繋ぎ、その相互間を有線又は無線で通信させることによって、この外部運転支援装置で実行させることも可能である。この変形例の運転支援システム2は、前述した実施例の運転支援システム1において、運転支援装置40と共に外部運転支援装置41(N)を設けたもの(N=1,2,…,n)又は運転支援装置40に替えて外部運転支援装置41(N)を設けたものである。図7は、後者の運転支援システム2を例示している。この運転支援システム2においても、実施例の運転支援システム1と同様の演算処理が行われ、この運転支援システム1と同様の効果を得ることができる。尚、その外部運転支援装置41(N)は、1台で1種類の運転支援サービスを実行する形態のものに限らず、1台で複数種類の運転支援サービスを実行する形態のものであってもよい。
【0055】
[変形例2]
前述した実施例や変形例1においては、通信装置10で受信した運転支援情報の全部又は一部が記憶装置20に格納され、その運転支援情報の中から選別された運転支援情報に基づいて運転支援サービスが実行される。これが為、例えば、選択された運転支援情報に基づく運転支援サービスの実行時期と運転支援情報の選別時期との間に大きな時間差がある場合、その選択された運転支援情報については、少なくとも運転支援サービスが開始されるまでの間、一時的にでも保持しておくことが好ましい。従って、この変形例2の運転支援システム3においては、前述した実施例又は変形例1の運転支援システム1,2に対して、運転支援情報選別装置30が選択した運転支援情報を格納する記憶装置21が設けられている。尚、図8は、前者の運転支援システム3を例示している。
【0056】
この様に構成した運転支援システム3においても、前述した運転支援システム1,2と同様の運転支援情報の選別が行われるので、この運転支援システム1,2と同様の効果を得ることができる。例えば、この運転支援システム3においても、運転支援情報選別装置30は、前述した運転支援システム1,2と同様に、道路種別に応じた運転支援情報の選別を行う(図4)。尚、図4のステップST1においては、記憶装置20の運転支援情報の他に、記憶装置21の運転支援情報についても削除対象となる。
【0057】
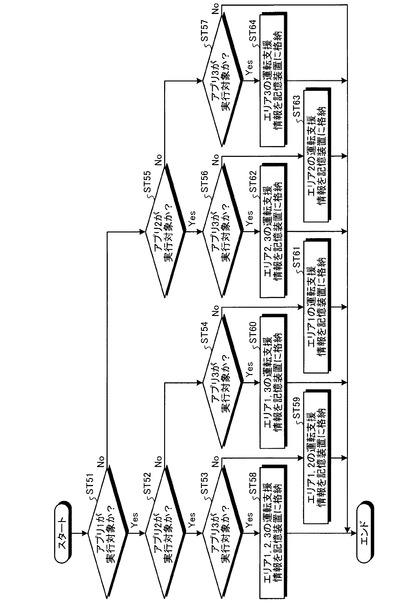
道路種別に拘わらず、運転支援情報選別装置30は、図9又は図10のフローチャートに示す様に、どのアプリケーションが実行対象になっているのか否かを判定する(ステップST51−ST57、ST71−ST77)。このステップST51−ST57、ST71−ST77の夫々の演算処理は、前述したステップST11−ST17の演算処理と各々同じである。
【0058】
一般道を走行している場合、運転支援情報選別装置30は、図9のフローチャートに示す様に、実行対象のアプリケーション(運転支援サービス)に応じた選別対象領域(エリア)を設定し、この選別対象領域に該当する運転支援情報を記憶装置20の運転支援情報の中から選択して、記憶装置21に格納する(ステップST58−ST64)。このステップST58−ST64における選別時の演算処理は、前述したステップST18−ST24の演算処理と各々同じである。そして、このステップST58−ST64では、その各々で選択された運転支援情報を記憶装置21に格納する。
【0059】
自動車専用道を走行している場合についても同様であり、運転支援情報選別装置30は、図10のフローチャートに示す様に、実行対象のアプリケーション(運転支援サービス)に応じた選別対象領域(エリア)を設定し、この選別対象領域に該当する運転支援情報を記憶装置20の運転支援情報の中から選択して、記憶装置21に格納する(ステップST78−ST84)。このステップST78−ST84では、前述したステップST38−ST44と同様の選別時の演算処理を各々行い、ここで選択された運転支援情報を記憶装置21に格納する。
【0060】
ここで、この運転支援システム3の運転支援情報選別装置30は、全ての運転支援サービスで使用される運転支援情報を選択した際に、その選択された運転支援情報をそのまま記憶装置21へと格納してもよく、また、その選択された運転支援情報を夫々の該当する運転支援サービスに紐付けして記憶装置21へと格納してもよい。更に、記憶装置21に運転支援サービス毎の記憶領域を設けておき、運転支援情報選別装置30には、運転支援サービス毎に夫々の該当する記憶領域へと運転支援情報を格納させてもよい。また更に、運転支援サービス毎の記憶装置を複数設けておき、運転支援情報選別装置30には、運転支援サービス毎に夫々の該当する記憶装置へと運転支援情報を格納させてもよい。
【0061】
この運転支援システム3の運転支援装置40は、実行対象の運転支援サービスに該当する運転支援情報を記憶装置21から読み込み、この読み込んだ運転支援情報に基づいて運転支援サービスを実行する。
【0062】
尚、ここでは受信した運転支援情報を格納する為の記憶装置20と選別後の運転支援情報を格納する為の記憶装置21とに分けているが、その夫々の運転支援情報は、1つの記憶装置に格納してもよい。
【0063】
[変形例3]
前述した変形例2の運転支援システム3においては、通信装置10で受信した運転支援情報を記憶装置20に格納している。この変形例3の運転支援システム4は、図11に示す様に、変形例2の運転支援システム3から記憶装置20を取り除いたものである。換言するならば、この変形例3の運転支援システム4は、前述した実施例又は変形例1の運転支援システム1,2において、記憶装置20を取り除くと共に、変形例2の運転支援システム3の記憶装置21を追加したものである。この運転支援システム4においては、通信装置10で受信した全て又は一部の運転支援情報を前述した各例示と同様にして運転支援情報選別装置30に選別させ、これにより選択された運転支援情報を記憶装置21に格納させる。この様に、この運転支援システム4に依れば、前述した実施例や変形例1,2の運転支援システム1−3と同様の効果が得られるのみならず、受信した運転支援情報を記憶装置20に格納させないので、その分の演算処理の負荷の軽減による演算処理の短縮化が更に可能になる。また、この運転支援システム4に依れば、記憶装置(記憶装置21)の記憶容量を各運転支援システム1−3の中で一番少なくできるので、システムの簡素化を図ることもできる。
【0064】
[変形例4]
前述した変形例2,3の運転支援システム3,4においては、運転支援情報が運転支援情報選別装置30で選別されたとしても、未だ運転支援情報の情報量(数や容量)が多く、記憶装置21の記憶容量を超えてしまう可能性がある。この変形例4の運転支援システム5は、この様な事態に対処させたものである。その為に、この運転支援システム5は、前述した変形例2,3の運転支援システム3,4において、運転支援情報選別装置30の演算処理形態を一部変更する。例えば、この運転支援システム5においては、選択した運転支援情報を記憶装置21へと格納する際に、その格納が記憶装置21の記憶容量に基づいて可能であるのか否かを判断し、格納できるのであれば、先の例示と同様にして、選択された運転支援情報を記憶装置21に格納する。一方、記憶装置21の記憶容量不足により格納できない場合には、その運転支援情報を運転支援サービスの優先度、運転支援情報に関する他車や設備等と自車との位置関係とに応じて更に選別する。
【0065】
具体的に、運転支援情報選別装置30は、図12のフローチャートに示す様に、選択された全ての運転支援情報の容量が記憶装置21の記憶容量以下であるのか否かを判定する(ステップST91)。その記憶容量とは、記憶装置21が運転支援情報の格納の為にしか使われないのであれば、この記憶装置21の記憶容量そのもののことであり、記憶装置21が運転支援情報の他にも情報等を格納するのであれば、運転支援情報の格納の為に割り当てられた容量又は残存容量のことである。
【0066】
運転支援情報選別装置30は、選択された全ての運転支援情報の容量が記憶装置21の記憶容量以下であれば、その選択された全ての運転支援情報を記憶装置21に格納する(ステップST92)。
【0067】
一方、選択された全ての運転支援情報の容量が記憶装置21の記憶容量を超えている場合、運転支援情報選別装置30は、その選択された全ての運転支援情報に関わる運転支援サービスのサービス数(以下、「格納対象運転支援サービス数」と云う。)が1つであるのか否かを判定する(ステップST93)。その格納対象運転支援サービス数とは、受信した運転支援情報を選別する際の判断に用いた運転支援サービスの数のことである。従って、システムが有する全ての運転支援サービスに基づき選別が行われた場合には、その全ての運転支援サービスの数がステップST93で用いる格納対象運転支援サービス数となる。そのシステムが有する全ての運転支援サービスとは、前述した外部運転支援装置41(N)がシステムに接続されている場合、その接続されている外部運転支援装置41(N)の運転支援サービスを含む全ての運転支援サービスのことを云う。また、実行対象の運転支援サービスに基づき選別が行われた場合には、その実行対象の運転支援サービスの数がステップST93で用いる格納対象運転支援サービス数となる。
【0068】
格納対象運転支援サービス数が1つしかない場合には、運転支援サービスの優先度に基づいた更なる選別ができない。従って、この場合、運転支援情報選別装置30は、選択された全ての運転支援情報に関する他車や設備等と自車との位置関係に基づいて、自車との相対距離が短い他車等に関する運転支援情報から順に容量を記憶装置21の記憶容量になるまで積算し、この様にして記憶装置21の記憶容量以下となるよう選択された自車との相対距離が短い運転支援情報を記憶装置21に格納する(ステップST94)。これにより、この運転支援システム5は、自車に近い他車等の運転支援情報から順に記憶装置21に残されるので、記憶装置21の記憶容量を増大させずとも、演算処理の負荷を軽減した状態で運転支援サービスを実行することができる。このステップST94においては、例えば、自車との相対距離が略同じ2台の他車が存在している場合、自車との相対車速等を観て、一方が自車と進行方向が同じであり、他方が自車と進行方向が逆の対向車であるならば、対向車に係る運転支援情報を優先的に記憶装置21へと格納させることが望ましい。
【0069】
ここで、この場合には、その後、記憶装置21内の不要になった運転支援情報を即時削除し、ステップST94で除外した運転支援情報を含む新たに受信された運転支援情報の中で運転支援サービスにおいて使用されるものが記憶装置21に格納されるようにする。これにより、この運転支援システム5は、運転支援サービスを実行し続けることができる。
【0070】
これに対して、格納対象運転支援サービス数が複数ある場合、運転支援情報選別装置30は、その夫々の運転支援サービスの優先度を調べ、優先度の低い運転支援サービスに係る選別対象領域(エリア)のみの運転支援情報を記憶装置21への格納対象から除外する(ステップST95)。その優先度とは、運転支援サービスのサービス内容の重要性により決まるものであり、例えばサービスが競合した場合にどちらを優先的に実行すべきかを表す指針となるものである。ここでは、例えば様々な種類の運転支援サービスの中で前述した安全系、エコ系、快適系、利便系の各運転支援サービスが対象になっていると仮定する。この場合には、安全系の運転支援サービスの優先度が最も高く、次にエコ系の運転支援サービスの優先度が高い。一方、快適系や利便系の運転支援サービスは、安全系やエコ系の運転支援サービスよりも優先度が低く、そのサービス内容の重要性や必要性に基づき優先度の高低が決められている。この様に、この運転支援システム5は、優先度の高い運転支援サービスを実行することができるので、演算処理の負荷を軽減しつつ、走行時の安全性を確保することができる。このステップST95においては、最も優先度の低い運転支援サービスに係る選別対象領域(エリア)のみの運転支援情報を削除してもよく、また、複数の運転支援サービスに係るものを除外しなければ記憶装置21に格納できないことが明らかな場合、複数の優先度の低い運転支援サービスに係る選別対象領域(エリア)のみの運転支援情報を削除してもよい。
【0071】
運転支援情報選別装置30は、このステップST95で運転支援情報の選別を行った後、ステップST91に戻り、記憶装置21への格納が終わるまで再び同様の演算処理が繰り返される。
【0072】
以上示した様に、この変形例においては、選択された全ての運転支援情報の容量が記憶装置21の記憶容量を超えている場合、格納対象運転支援サービス数が1つであるのか否かを判定することになる。例えば、その格納対象運転支援サービス数が複数存在していたときには、ステップST95において、夫々の格納対象運転支援サービスの中から優先度の低い格納対象運転支援サービスに係る選別対象領域(エリア)のみの運転支援情報が記憶装置21への格納対象から除外される。つまり、このステップST95においては、優先度の低い格納対象運転支援サービスがサービスの実行対象から除外されるので、その分だけ格納対象運転支援サービス数が減ることになる。
【0073】
このステップST95の演算処理によって、ここでは、記憶装置21への格納対象となっている上記の選択された運転支援情報の容量が小さくなっている。これが為、ステップST91で肯定判定されたときには、優先度の高い運転支援サービスの運転支援情報がステップST92で記憶装置21に格納される。しかしながら、上記の選択された運転支援情報の容量がステップST95の演算処理で小さくなったとしても、その全てを未だ記憶装置21に格納しきれない場合もある。この場合には、ステップST93で更に格納対象運転支援サービス数の判定を行い、ここで1つと判定されるまで又はステップST91で肯定判定されるまで、格納対象運転支援サービス数を減らしながらステップST91→ステップST93→ステップST95の演算処理を繰り返す。そして、最終的に格納対象運転支援サービス数が1つになるまで運転支援情報を減らしても記憶装置21に格納しきれないときには、ステップST94に進み、その運転支援情報の中から自車との相対距離が短い情報を選んで記憶装置21に格納する。
【0074】
従って、この変形例の運転支援システム5に依れば、記憶装置21の記憶容量を拡大させる等のシステムの改変を行わずとも、自車に対して優先度の高い運転支援サービスから適宜実行されることになる。
【0075】
以上示した運転支援システム1−5においては運転支援情報選別装置30等を車両に搭載しているが、運転支援情報選別装置30や記憶装置21は、運転支援センタに設けてもよい。この場合には、例えば、自車で実行対象になっている運転支援サービスについての情報が路側機を介して運転支援センタに送信され、その運転支援サービスに該当するものとして選択されている運転支援情報が運転支援センタから路側機を介して自車で受信される。そして、自車においては、その受信した運転支援情報に基づいて運転支援装置40が運転支援サービスを実行する。
【符号の説明】
【0076】
1,2,3,4,5 運転支援システム
10 通信装置
20 記憶装置
21 記憶装置
30 運転支援情報選別装置
40 運転支援装置
41 外部運転支援装置
50 支援機器
51 表示装置
52 音響装置
53 制御機器
71 指示装置
【技術分野】
【0001】
本発明は、外部から受信した運転支援情報に基づいて運転支援サービスを実行する運転支援システムに関する。
【背景技術】
【0002】
従来、1台の車両において複数の運転支援サービスを行う運転支援システムが知られている。例えば、下記の特許文献1には、信号灯色に応じた運転支援サービスと他の移動体(他車、歩行者、自転車)に応じた運転支援サービスとを行う運転支援システムが開示されている。この運転支援システムにおいては、信号灯色が赤色であり信号停止位置での停止を促す運転支援サービスを行う場合に、他の移動体に基づいた運転支援サービスを実行させないようにして、不要な運転支援サービスの実行を抑制している。また、下記の特許文献2には、自車の車速が所定速度未満のときに、自車周辺の所定領域に車車間通信の受信指向性を向かせる一方、自車の車速が所定速度以上のときに、車車間通信の受信指向性を無指向性とし、自車の車速が上がるにつれて広範囲の他車の情報を取得できるようにする技術が開示されている。尚、下記の特許文献3には、車車間通信で検出した他車を地図データ上にマッチングする際、制御対象となる他車の選定領域を自車の道路情報(道路種別、道路形状等)と運転情報(車速、ウインカ状態等)とに基づいて可変設定し、制御対象として不要な他車を排除する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−293440号公報
【特許文献2】特開2008−077348号公報
【特許文献3】特開2011−095929号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、運転支援サービスを行う際の基となる運転支援情報(他車や信号情報等)については、必ずしも常に一定数が受信されるわけではなく、少数しか受信されないときもあれば、多数が受信されるときもある。そして、多くの運転支援情報が受信された場合には、その数が多くなるほど運転支援サービスに係る演算処理の負荷が高くなっていく。例えば、上記特許文献1に記載の運転支援システムにおいては、受信した他の移動体の数が多くなるほど、その移動体毎に運転支援サービスに係る演算処理を行わなければならず、その演算処理の負荷が高くなる。また、上記特許文献2に記載の運転支援システムにおいては、自車の車速が上がるにつれて広範囲の他車の情報が受信されるので、車速の上昇に伴い運転支援サービスに係る演算処理の負荷が高くなっていく可能性がある。
【0005】
そこで、本発明は、かかる従来例の有する不都合を改善し、演算処理の負荷の軽減を図ることが可能な運転支援システムを提供することを、その目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成する為、本発明は、複数の運転支援情報を外部から受信する通信装置と、前記各運転支援情報の中から運転支援サービスで使用される運転支援情報を選別する運転支援情報選別装置と、前記運転支援情報選別装置で選択された前記運転支援サービスで使用される運転支援情報に基づいて当該運転支援サービスを実行する運転支援装置と、を備えることを特徴としている。
【0007】
ここで、前記通信装置で受信した運転支援情報が格納される記憶装置を設け、前記運転支援情報選別装置は、前記記憶装置に格納されている前記運転支援情報の中から前記運転支援サービスで使用される運転支援情報を選別し、これにより選択された前記運転支援サービスで使用される運転支援情報を前記運転支援装置に送信することが望ましい。
【0008】
また、前記運転支援情報選別装置で選択された運転支援情報が格納される記憶装置を設け、前記運転支援装置は、前記記憶装置に格納されている運転支援情報に基づいて前記運転支援サービスを実行することが望ましい。
【0009】
前記運転支援装置が複数の前記運転支援サービスを実行するものである場合又は1つ以上の前記運転支援サービスを実行する前記運転支援装置が複数設けられている場合、前記運転支援情報選別装置は、前記運転支援サービスの種別毎に前記運転支援情報の選別を行うことが望ましい。
【0010】
前記運転支援情報選別装置は、実行対象となっている前記運転支援サービスの種別毎に前記運転支援情報の選別を行うことが望ましい。
【0011】
また、前記運転支援装置が複数の前記運転支援サービスを実行するものである場合又は1つ以上の前記運転支援サービスを実行する前記運転支援装置が複数設けられている場合、前記記憶装置に前記運転支援サービス毎の記憶領域を設ける又は夫々の前記運転支援サービス毎に前記記憶装置を備えることが望ましい。
【0012】
また、前記運転支援情報選別装置は、選択された前記運転支援情報を自車の走行情報又は走行環境の内の少なくとも一方に応じて更に選別することが望ましい。
【0013】
また、前記運転支援情報選別装置は、選択された前記運転支援情報の情報量に応じて更に当該運転支援情報の選別を行うことが望ましい。
【発明の効果】
【0014】
本発明に係る運転支援システムは、外部から受信した運転支援情報を運転支援サービスに基づいて選別し、これにより選択された運転支援情報に基づいて運転支援サービスを実行する。これが為、この運転支援システムに依れば、受信した運転支援情報の中から不要なものを排除して運転支援サービスを行うことができるので、演算処理に掛かる負荷を軽減することができる。
【図面の簡単な説明】
【0015】
【図1】図1は、本発明に係る運転支援システムの実施例の構成を示す図である。
【図2】図2は、一般道の選別対象領域について説明する図である。
【図3】図3は、自動車専用道の選別対象領域について説明する図である。
【図4】図4は、実施例の運転支援システムの演算処理動作について説明するフローチャートである。
【図5】図5は、実施例の運転支援システムにおける一般道の運転支援情報の選別処理動作について説明するフローチャートである。
【図6】図6は、実施例の運転支援システムにおける自動車専用道の運転支援情報の選別処理動作について説明するフローチャートである。
【図7】図7は、実施例の運転支援システムにおける他の構成を示す図である。
【図8】図8は、本発明に係る運転支援システムの変形例1の構成を示す図である。
【図9】図9は、変形例1の運転支援システムにおける一般道の運転支援情報の選別及び格納の処理動作について説明するフローチャートである。
【図10】図10は、変形例1の運転支援システムにおける自動車専用道の運転支援情報の選別及び格納の処理動作について説明するフローチャートである。
【図11】図11は、本発明に係る運転支援システムの変形例3の構成を示す図である。
【図12】図12は、変形例4の運転支援システムの演算処理動作について説明するフローチャートである。
【発明を実施するための形態】
【0016】
以下に、本発明に係る運転支援システムの実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
【0017】
[実施例]
本発明に係る運転支援システムの実施例を図1から図12に基づいて説明する。
【0018】
図1の符号1は、本実施例の運転支援システムを示す。
【0019】
この運転支援システム1は、外部から運転支援情報を受信する通信装置10を備える。この通信装置10は、少なくとも外部から運転支援情報を受信することができればよいのだが、自車の運転支援情報を外部へと送信できるように構成されていてもよい。この通信装置10は、所謂車車間通信、路車間通信、車路車間通信等によって、運転支援情報を外部から受信する。
【0020】
その運転支援情報とは運転支援サービスを行う際に用いられる情報のことであり、後述する運転支援装置40は、その運転支援情報に基づいて運転支援サービスを実行する。例えば、車車間通信や車路車間通信においては、他車情報(他車の位置情報、他車における車速等の走行情報、他車における方向指示器の向き等の車両挙動情報など)が運転支援情報に該当する。ここで例示している他車情報は、各車両が安全に走行する為の所謂安全系の運転支援サービス、燃費性能やエミッション性能の悪化を抑える為の所謂エコ系の運転支援サービス等に利用される。また、路車間通信においては、他車情報、歩行者や自転車の位置情報、道路や交差点の線形情報、信号機の信号灯色情報等が運転支援情報に該当する。これらの運転支援情報についても、安全系やエコ系の運転支援サービス等に利用される。
【0021】
運転支援システム1には、通信装置10で受信した運転支援情報を格納する記憶装置20が設けられている。その記憶装置20には、受信した全ての運転支援情報が格納される場合もあれば、受信した運転支援情報の内の一部が格納される場合もある。その格納されている運転支援情報は、例えば交差点を通過するなどして不要になった場合、記憶装置20から削除される。
【0022】
また、この運転支援システム1には、記憶装置20に格納されている運転支援情報の中から運転支援サービスで使用される運転支援情報を選別する運転支援情報選別装置30が設けられている。その運転支援情報選別装置30は、記憶装置20に格納されている全て又は一部の運転支援情報の中から選別を行う。この運転支援システム1においては、その選別された運転支援サービスで使用される運転支援情報が運転支援装置40に渡されて、後述する支援機器50が制御される。
【0023】
運転支援情報選別装置30は、この運転支援システム1で提供される運転支援サービスが1種類だけであれば、その運転支援サービスの実行の為に必要とされる運転支援情報(つまり運転支援サービスで使用される運転支援情報)を選択する。一方、この運転支援システム1で複数種類の運転支援サービスが提供される場合には、その夫々の運転支援サービスに応じた運転支援情報が選択される。例えば、運転支援情報選別装置30は、その全ての運転支援サービスで使用される運転支援情報を記憶装置20の運転支援情報の中から選択する。また、この運転支援情報選別装置30は、その全ての運転支援サービスの中で後述する指示装置71の操作に伴い実行対象になっている運転支援サービスにおいて使用される運転支援情報を選択してもよい。ここで選択されなかった記憶装置20の運転支援情報は、不要なものとして記憶装置20から削除する。
【0024】
ここで、通信装置10からは、広範囲に渡る運転支援情報が受信される。その一方で、運転支援サービスで用いる運転支援情報は、その全ての範囲に存在しているものを必ずしも必要とはしない。そして、選別対象の運転支援情報が存在している領域(以下、「選別対象領域」と云う。)については、自車位置との関係で運転支援サービス毎に特定することができる。
【0025】
例えば、自車の周囲360度の他車の動きを監視しながら行う安全系の運転支援サービスにおいては、自車の進行方向に拘わらず、周囲360度の他車情報が必要とされる。これが為、この様な運転支援サービスで使用される運転支援情報を選択する場合には、例えば、図2に示す周囲360度に渡る選別対象領域1(エリア1)を設定すればよい。この選別対象領域1については、この運転支援サービスの支援範囲に基づいて自車を中心とする領域を設定すればよい。尚、この運転支援サービスにおいては、自車位置等の自車情報についても運転支援情報として利用される。
【0026】
また、同じ安全系の運転支援サービスであっても、前方の交差点を安全に通過する為の運転支援サービスの場合には、自車の前方の他車情報や交差点の信号灯色情報を必要とするが、自車の後方の他車情報等を必要としない。車速制御することで誘導経路上の各交差点を青色の信号灯色で走行させ続ける様なエコ系の運転支援サービスにおいても同様である。これが為、この様な運転支援サービスで使用される運転支援情報を選択する場合には、例えば、図2に示す前方のみの選別対象領域2(エリア2)を設定すればよい。この選別対象領域2については、この運転支援サービスの支援範囲に基づいて自車の前方の領域や自車の進行方向に対する左右の領域を設定すればよい。
【0027】
また、所謂快適系の運転支援サービスや利便系の運転支援サービスにおいては、自車の周囲360度の広範囲の他車情報や施設情報等に基づいて運転支援サービスを行うことが好ましい。これらの運転支援サービスとは、例えば、他車の運転者との間で情報の授受を行ったり、自車の周辺の施設情報(店舗情報や行楽施設情報等)を自車の運転者に提供したりするものである。これが為、この様な運転支援サービスで使用される運転支援情報を選択する場合には、例えば、図2に示す周囲360度に渡る選別対象領域3(エリア3)を設定すればよい。この例示では、安全系の運転支援サービスよりも広範囲の他車情報や施設情報等を対象にしているので、選別対象領域1よりも選別対象領域3の方が広くなっている。
【0028】
運転支援情報選別装置30には、運転支援サービスに応じた選別対象領域を設定させ、この選別対象領域に基づいて記憶装置20の運転支援情報を選別させる。これにより、選別対象領域から外れている他車や信号機等に関わる運転支援情報が除外され、この選別対象領域内の他車等に関わる運転支援情報が選択される。その選別対象領域の設定は、この運転支援システム1で複数種類の運転支援サービスが提供される場合、その全ての運転支援サービスの選別対象領域を各々設定してもよく、その全ての運転支援サービスの中で実行対象になっているものの選別対象領域のみを設定してもよい。また、その選別は、設定された選別対象領域毎に1つずつ行ってもよく、設定された全ての選別対象領域を対象にして一度に行ってもよい。運転支援情報選別装置30は、この様にして、記憶装置20に格納されている運転支援情報の中から運転支援サービスで使用される運転支援情報を選択することができる。従って、運転支援装置40は、その選択された運転支援情報のみを対象にして運転支援サービスを行うことができるので、その実行時の演算処理に係る負担が軽減される。
【0029】
ここで、選別対象領域(選別対象領域1,2,3)は、自車の車速が高くなるほど領域を広げることが望ましい。車速の上昇と共に広範囲の運転支援情報を取得することで、運転支援サービスがより実効あるものになるからである。従って、運転支援情報選別装置30には、自車の走行情報における車速情報を取得させ、この車速情報に応じた選別対象領域を設定させて、運転支援情報の選別を行わせることが好ましい。この場合、運転支援情報選別装置30は、運転支援サービスと車速とに応じた選別対象領域を設定し、この選別対象領域に基づいて記憶装置20の運転支援情報を選別する。その車速情報については、車速センサや車輪速センサ等の車速検出装置61の検出信号に基づいて取得すればよい。
【0030】
更に、この運転支援情報選別装置30は、その運転支援情報の選別を行う際に、自車の走行環境についても考慮することが望ましい。ここで例示する自車の走行環境とは、少なくとも走行中の道路情報に基づいて判断されたものであって、自車が高速道路等の自動車専用道を走行しているのか、これ以外の一般道を走行しているのかについて表したものである。従って、この運転支援情報選別装置30には、自車の走行中の道路情報に基づいて、自車がどの様な種別の道路を走行しているのかについて判断させる。自車が走行している道路情報については、自車位置情報と地図情報とに基づいて把握できる。自車位置情報は、自車がカーナビゲーションシステムを搭載しているのであれば、GPS(Global Positioning System)制御装置62の把握している自車位置情報を利用すればよい。また、地図情報は、カーナビゲーションシステムの地図情報63を利用すればよい。
【0031】
自動車専用道においては、一般道と比較すると、車速が高く、また、横方向からの他車の進入もない。これが為、自動車専用道では、車両前後方向の他車等に関する運転支援情報が一般道よりも広範囲で必要になる一方、車両横方向の他車等に関する運転支援情報が一般道よりも狭い範囲のもので事足りる。従って、例えば、前述した図2に例示した選別対象領域(選別対象領域1,2,3)が一般道のものとした場合、自動車専用道の選別対象領域(選別対象領域4,5,6)は、一般道のものよりも車両前後方向に広く且つ車両横方向に狭くなる(図3)。尚、その選別対象領域4,5,6は、各々選別対象領域1,2,3に対応したものであり、同種の運転支援サービスに該当するものである。
【0032】
この場合、運転支援情報選別装置30は、例えば、自車の走行環境に応じた選別対象領域と運転支援サービスに応じた選別対象領域とを設定する。そして、この運転支援情報選別装置30は、自車の走行環境に応じた選別対象領域に基づいて記憶装置20の運転支援情報を選別し、これにより選択された選別対象領域内の運転支援情報を運転支援サービスに応じた選別対象領域に基づいて更に選別する。運転支援情報選別装置30は、この様にして、記憶装置20に格納されている運転支援情報の中から運転支援サービスで使用されるものを自車の走行環境をも考慮した上で選択することができる。従って、運転支援装置40は、その自車の走行環境に応じて更に選別された運転支援情報のみを対象にして運転支援サービスを行うことができるので、その実行時の演算処理に係る負担が更に軽減される。
【0033】
ここで、運転支援情報選別装置30には、自動車専用道であっても、自車の走行情報における車速情報に応じた選別対象領域(選別対象領域4,5,6)を設定させてもよい。例えば、混雑時には、車速が低下するので、選別対象領域における車両前後方向を狭めてもよい。また、自動車専用道においては、他車が側道から合流してくる場合もある。これが為、運転支援情報選別装置30には、合流地点において選別対象領域における車両横方向を拡げさせてもよい。
【0034】
運転支援装置40は、運転支援情報に基づいて運転支援サービスを実行する。図1に例示する運転支援装置40は、運転支援サービスの種類毎の複数のアプリケーションN(N=1,2,…,n)を有するものである。この運転支援装置40は、実行対象となっている運転支援サービスで使用される運転支援情報を運転支援情報選別装置30から受け取ると、その運転支援情報を実行対象の運転支援サービスのアプリケーションNに渡し、この運転支援情報に基づいて運転支援サービスを実行する。
【0035】
その運転支援サービスは、運転支援情報に基づいて支援機器50を制御することで実行される。例えば、前述した交差点における安全系の運転支援サービスの場合、運転支援装置40は、交差点における他車や歩行者等の位置情報や信号灯色情報などに基づいて警告情報を生成し、これを運転者に伝える。ここで、その伝達方法としては、視覚を刺激するものや聴覚を刺激するものがある。従って、支援機器50としては、例えば、その警告情報を車室内に表示して運転者に伝える表示装置51、その警告情報を音響情報で示して運転者に伝える音響装置52等のHMI(Human Machine Interface)機器がある。また、前述した車速制御によるエコ系の運転支援サービスの場合、運転支援装置40は、誘導経路上の各交差点の信号灯色情報や自車の位置情報及び車速情報等に基づいて、夫々の交差点を信号灯色が青色の状態で走行し続けるように自車の車速を制御する。従って、この場合には、エンジン(図示略)のスロットル弁の制御アクチュエータやブレーキ装置の制動力制御用のアクチュエータ等の車両の制御機器53が支援機器50となる。
【0036】
以上示した運転支援システム1は、車室内の指示装置71を介して作動する。その指示装置71は、乗員によって操作され、運転支援サービスの開始を指示する為のものである。この指示装置71は、例えば、切替スイッチの如き形態のものであってもよく、カーナビゲーションシステム等のモニタ上で指示を行う形態のものであってもよい。
【0037】
この運転支援システム1の演算処理動作について図4−6のフローチャートに基づき説明する。尚、ここでは、運転支援システム1に3種類の運転支援サービス(アプリケーション1,2,3)が用意されているものとする。そして、選別対象領域1,2,3は、夫々にアプリケーション1,2,3に対応しており、また、選別対象領域4,5,6についても夫々にアプリケーション1,2,3に対応しているものとする。
【0038】
運転支援情報選別装置30は、例えばイグニッションオン信号や指示装置71からの指示信号が検出されたときに、記憶装置20に運転支援情報が残っていれば、この格納されている運転支援情報を削除する(ステップST1)。尚、その後、記憶装置20には、通信装置10で受信した運転支援情報が格納される。
【0039】
そして、運転支援情報選別装置30は、自車が自動車専用道を走行しているのか否かの判定を行う(ステップST2)。その結果、運転支援情報選別装置30は、一般道を走行していれば、一般道用に運転支援情報の選別を行い(ステップST3)、自動車専用道を走行していれば、自動車専用道用に運転支援情報の選別を行う(ステップST4)。以下、そのステップST3,ST4の一例について詳述する。
【0040】
運転支援情報選別装置30は、一般道用の運転支援情報の選別を行う際、図5のフローチャートに示す様に、例えば指示装置71からの指示信号に基づいてアプリケーション1(アプリ1)が実行対象になっているのか否かを判定する(ステップST11)。運転支援情報選別装置30は、アプリケーション1が実行対象であれば、次にアプリケーション2(アプリ2)が実行対象になっているのか否かを判定し(ステップST12)、このアプリケーション2も実行対象であれば、アプリケーション3(アプリ3)が実行対象になっているのか否かの判定を行う(ステップST13)。
【0041】
また、運転支援情報選別装置30は、ステップST12でアプリケーション2が実行対象になっていないと判定した場合にも、アプリケーション3が実行対象になっているのか否かを判定する(ステップST14)。また、運転支援情報選別装置30は、ステップST11でアプリケーション1が実行対象になっていないと判定した場合、アプリケーション2が実行対象になっているのか否かを判定し(ステップST15)、その結果の如何に拘わらず、アプリケーション3が実行対象になっているのか否かの判定を行う(ステップST16,ST17)。
【0042】
運転支援情報選別装置30は、ステップST13で肯定判定され、3種類の運転支援サービス(アプリケーション1,2,3)が全て実行対象になっていると判った場合、選別対象領域1,2,3(エリア1,2,3)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域1,2,3に該当する運転支援情報を選択する(ステップST18)。一方、この運転支援情報選別装置30は、ステップST13で否定判定され、アプリケーション1,2の運転支援サービスが実行対象になっていると判った場合、選別対象領域1,2(エリア1,2)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域1,2に該当する運転支援情報を選択する(ステップST19)。
【0043】
また、運転支援情報選別装置30は、ステップST14で肯定判定され、アプリケーション1,3の運転支援サービスが実行対象になっていると判った場合、選別対象領域1,3(エリア1,3)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域1,3に該当する運転支援情報を選択する(ステップST20)。一方、この運転支援情報選別装置30は、ステップST14で否定判定され、アプリケーション1の運転支援サービスが実行対象になっていると判った場合、選別対象領域1(エリア1)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域1に該当する運転支援情報を選択する(ステップST21)。
【0044】
また、運転支援情報選別装置30は、ステップST16で肯定判定され、アプリケーション2,3の運転支援サービスが実行対象になっていると判った場合、選別対象領域2,3(エリア2,3)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域2,3に該当する運転支援情報を選択する(ステップST22)。一方、この運転支援情報選別装置30は、ステップST16で否定判定され、アプリケーション2の運転支援サービスが実行対象になっていると判った場合、選別対象領域2(エリア2)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域2に該当する運転支援情報を選択する(ステップST23)。
【0045】
また、運転支援情報選別装置30は、ステップST17で肯定判定され、アプリケーション3の運転支援サービスが実行対象になっていると判った場合、選別対象領域3(エリア3)の設定を行い、記憶装置20の運転支援情報の中から選別対象領域3に該当する運転支援情報を選択する(ステップST24)。一方、この運転支援情報選別装置30は、ステップST17で否定判定された場合、どの運転支援サービスも実行対象になっていないので、運転支援情報の選別を行わずに本演算処理を終わらせる。
【0046】
運転支援情報選別装置30は、自動車専用道用の運転支援情報の選別を行う際、図6のフローチャートに示す様に、どのアプリケーションが実行対象になっているのか否かを判定する(ステップST31−ST37)。このステップST31−ST37の演算処理は、前述したステップST11−ST17の演算処理と各々同じである。
【0047】
運転支援情報選別装置30は、ステップST33で肯定判定され、3種類の運転支援サービス(アプリケーション1,2,3)が全て実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域4,5,6(エリア4,5,6)に該当する運転支援情報を選択し(ステップST38)、ステップST33で否定判定され、アプリケーション1,2の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域4,5(エリア4,5)に該当する運転支援情報を選択する(ステップST39)。
【0048】
また、運転支援情報選別装置30は、ステップST34で肯定判定され、アプリケーション1,3の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域4,6(エリア4,6)に該当する運転支援情報を選択し(ステップST40)、ステップST44で否定判定され、アプリケーション1の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域4(エリア4)に該当する運転支援情報を選択する(ステップST41)。
【0049】
また、運転支援情報選別装置30は、ステップST36で肯定判定され、アプリケーション2,3の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域5,6(エリア5,6)に該当する運転支援情報を選択し(ステップST42)、ステップST36で否定判定され、アプリケーション2の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域5(エリア5)に該当する運転支援情報を選択する(ステップST43)。
【0050】
また、運転支援情報選別装置30は、ステップST37で肯定判定され、アプリケーション3の運転支援サービスが実行対象になっていると判った場合、記憶装置20の運転支援情報の中から選別対象領域6(エリア6)に該当する運転支援情報を選択し(ステップST44)、ステップST37で否定判定された場合、どの運転支援サービスも実行対象になっていないので、運転支援情報の選別を行わずに本演算処理を終わらせる。
【0051】
運転支援情報選別装置30は、この様にして選択した運転支援情報に基づいて運転支援サービスを実行する。
【0052】
以上示した様に、この運転支援システム1においては、受信した運転支援情報が運転支援サービスや自車の走行環境等に基づいて選別されるので、その運転支援サービスを不要な運転支援情報を選り分けながら実行する必要がなくなり、運転支援サービスを行うに際しての演算処理の負荷を軽減させることができる。従って、この運転支援システム1に依れば、運転支援サービスを実行する際の応答性を向上させることができ、更に、その演算処理を担う機器やプログラムの簡素化を図ることができる。
【0053】
ここで、この実施例では運転支援サービス(アプリケーション)毎に選別対象領域を設定しているが、例えば、運転支援サービスの種別(安全系、エコ系等)と選別対象領域との間に相関関係がある場合には、運転支援サービスの種別毎に選別対象領域が設定されるようにしてもよい。その相関関係とは、或る種別の運転支援サービスであれば、そのサービス内容の違いに拘わらず、例えば図2の選別対象領域1内の運転支援情報が必要とされる場合のことを云う。従って、前述した自車の周囲360度の他車の動きを監視しながら行う安全系の運転支援サービスと交差点を安全に通過する為の安全系の運転支援サービスの様に、そのサービス内容の違いによって選別対象領域が異なる場合、運転支援情報選別装置30には、運転支援サービスの種別毎に選別対象領域を設定させるよりも、運転支援サービス(アプリケーション)毎に選別対象領域を設定させることが望ましい。
【0054】
[変形例1]
前述した実施例の運転支援装置40は、提供される運転支援サービスに対応させたアプリケーションを有するものとして例示した。ここで、運転支援サービスは、所望の運転支援サービスの実行が可能な携帯端末等の外部運転支援装置を車両に繋ぎ、その相互間を有線又は無線で通信させることによって、この外部運転支援装置で実行させることも可能である。この変形例の運転支援システム2は、前述した実施例の運転支援システム1において、運転支援装置40と共に外部運転支援装置41(N)を設けたもの(N=1,2,…,n)又は運転支援装置40に替えて外部運転支援装置41(N)を設けたものである。図7は、後者の運転支援システム2を例示している。この運転支援システム2においても、実施例の運転支援システム1と同様の演算処理が行われ、この運転支援システム1と同様の効果を得ることができる。尚、その外部運転支援装置41(N)は、1台で1種類の運転支援サービスを実行する形態のものに限らず、1台で複数種類の運転支援サービスを実行する形態のものであってもよい。
【0055】
[変形例2]
前述した実施例や変形例1においては、通信装置10で受信した運転支援情報の全部又は一部が記憶装置20に格納され、その運転支援情報の中から選別された運転支援情報に基づいて運転支援サービスが実行される。これが為、例えば、選択された運転支援情報に基づく運転支援サービスの実行時期と運転支援情報の選別時期との間に大きな時間差がある場合、その選択された運転支援情報については、少なくとも運転支援サービスが開始されるまでの間、一時的にでも保持しておくことが好ましい。従って、この変形例2の運転支援システム3においては、前述した実施例又は変形例1の運転支援システム1,2に対して、運転支援情報選別装置30が選択した運転支援情報を格納する記憶装置21が設けられている。尚、図8は、前者の運転支援システム3を例示している。
【0056】
この様に構成した運転支援システム3においても、前述した運転支援システム1,2と同様の運転支援情報の選別が行われるので、この運転支援システム1,2と同様の効果を得ることができる。例えば、この運転支援システム3においても、運転支援情報選別装置30は、前述した運転支援システム1,2と同様に、道路種別に応じた運転支援情報の選別を行う(図4)。尚、図4のステップST1においては、記憶装置20の運転支援情報の他に、記憶装置21の運転支援情報についても削除対象となる。
【0057】
道路種別に拘わらず、運転支援情報選別装置30は、図9又は図10のフローチャートに示す様に、どのアプリケーションが実行対象になっているのか否かを判定する(ステップST51−ST57、ST71−ST77)。このステップST51−ST57、ST71−ST77の夫々の演算処理は、前述したステップST11−ST17の演算処理と各々同じである。
【0058】
一般道を走行している場合、運転支援情報選別装置30は、図9のフローチャートに示す様に、実行対象のアプリケーション(運転支援サービス)に応じた選別対象領域(エリア)を設定し、この選別対象領域に該当する運転支援情報を記憶装置20の運転支援情報の中から選択して、記憶装置21に格納する(ステップST58−ST64)。このステップST58−ST64における選別時の演算処理は、前述したステップST18−ST24の演算処理と各々同じである。そして、このステップST58−ST64では、その各々で選択された運転支援情報を記憶装置21に格納する。
【0059】
自動車専用道を走行している場合についても同様であり、運転支援情報選別装置30は、図10のフローチャートに示す様に、実行対象のアプリケーション(運転支援サービス)に応じた選別対象領域(エリア)を設定し、この選別対象領域に該当する運転支援情報を記憶装置20の運転支援情報の中から選択して、記憶装置21に格納する(ステップST78−ST84)。このステップST78−ST84では、前述したステップST38−ST44と同様の選別時の演算処理を各々行い、ここで選択された運転支援情報を記憶装置21に格納する。
【0060】
ここで、この運転支援システム3の運転支援情報選別装置30は、全ての運転支援サービスで使用される運転支援情報を選択した際に、その選択された運転支援情報をそのまま記憶装置21へと格納してもよく、また、その選択された運転支援情報を夫々の該当する運転支援サービスに紐付けして記憶装置21へと格納してもよい。更に、記憶装置21に運転支援サービス毎の記憶領域を設けておき、運転支援情報選別装置30には、運転支援サービス毎に夫々の該当する記憶領域へと運転支援情報を格納させてもよい。また更に、運転支援サービス毎の記憶装置を複数設けておき、運転支援情報選別装置30には、運転支援サービス毎に夫々の該当する記憶装置へと運転支援情報を格納させてもよい。
【0061】
この運転支援システム3の運転支援装置40は、実行対象の運転支援サービスに該当する運転支援情報を記憶装置21から読み込み、この読み込んだ運転支援情報に基づいて運転支援サービスを実行する。
【0062】
尚、ここでは受信した運転支援情報を格納する為の記憶装置20と選別後の運転支援情報を格納する為の記憶装置21とに分けているが、その夫々の運転支援情報は、1つの記憶装置に格納してもよい。
【0063】
[変形例3]
前述した変形例2の運転支援システム3においては、通信装置10で受信した運転支援情報を記憶装置20に格納している。この変形例3の運転支援システム4は、図11に示す様に、変形例2の運転支援システム3から記憶装置20を取り除いたものである。換言するならば、この変形例3の運転支援システム4は、前述した実施例又は変形例1の運転支援システム1,2において、記憶装置20を取り除くと共に、変形例2の運転支援システム3の記憶装置21を追加したものである。この運転支援システム4においては、通信装置10で受信した全て又は一部の運転支援情報を前述した各例示と同様にして運転支援情報選別装置30に選別させ、これにより選択された運転支援情報を記憶装置21に格納させる。この様に、この運転支援システム4に依れば、前述した実施例や変形例1,2の運転支援システム1−3と同様の効果が得られるのみならず、受信した運転支援情報を記憶装置20に格納させないので、その分の演算処理の負荷の軽減による演算処理の短縮化が更に可能になる。また、この運転支援システム4に依れば、記憶装置(記憶装置21)の記憶容量を各運転支援システム1−3の中で一番少なくできるので、システムの簡素化を図ることもできる。
【0064】
[変形例4]
前述した変形例2,3の運転支援システム3,4においては、運転支援情報が運転支援情報選別装置30で選別されたとしても、未だ運転支援情報の情報量(数や容量)が多く、記憶装置21の記憶容量を超えてしまう可能性がある。この変形例4の運転支援システム5は、この様な事態に対処させたものである。その為に、この運転支援システム5は、前述した変形例2,3の運転支援システム3,4において、運転支援情報選別装置30の演算処理形態を一部変更する。例えば、この運転支援システム5においては、選択した運転支援情報を記憶装置21へと格納する際に、その格納が記憶装置21の記憶容量に基づいて可能であるのか否かを判断し、格納できるのであれば、先の例示と同様にして、選択された運転支援情報を記憶装置21に格納する。一方、記憶装置21の記憶容量不足により格納できない場合には、その運転支援情報を運転支援サービスの優先度、運転支援情報に関する他車や設備等と自車との位置関係とに応じて更に選別する。
【0065】
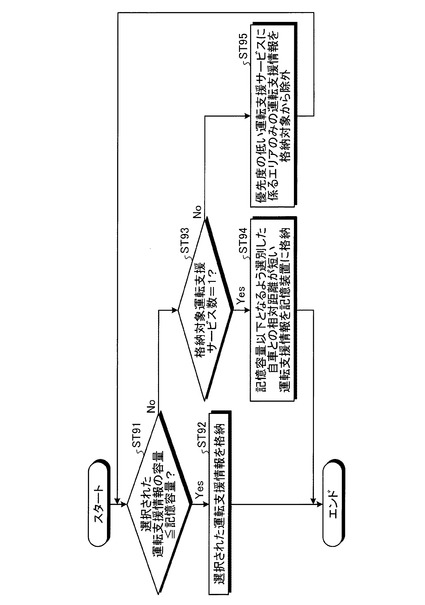
具体的に、運転支援情報選別装置30は、図12のフローチャートに示す様に、選択された全ての運転支援情報の容量が記憶装置21の記憶容量以下であるのか否かを判定する(ステップST91)。その記憶容量とは、記憶装置21が運転支援情報の格納の為にしか使われないのであれば、この記憶装置21の記憶容量そのもののことであり、記憶装置21が運転支援情報の他にも情報等を格納するのであれば、運転支援情報の格納の為に割り当てられた容量又は残存容量のことである。
【0066】
運転支援情報選別装置30は、選択された全ての運転支援情報の容量が記憶装置21の記憶容量以下であれば、その選択された全ての運転支援情報を記憶装置21に格納する(ステップST92)。
【0067】
一方、選択された全ての運転支援情報の容量が記憶装置21の記憶容量を超えている場合、運転支援情報選別装置30は、その選択された全ての運転支援情報に関わる運転支援サービスのサービス数(以下、「格納対象運転支援サービス数」と云う。)が1つであるのか否かを判定する(ステップST93)。その格納対象運転支援サービス数とは、受信した運転支援情報を選別する際の判断に用いた運転支援サービスの数のことである。従って、システムが有する全ての運転支援サービスに基づき選別が行われた場合には、その全ての運転支援サービスの数がステップST93で用いる格納対象運転支援サービス数となる。そのシステムが有する全ての運転支援サービスとは、前述した外部運転支援装置41(N)がシステムに接続されている場合、その接続されている外部運転支援装置41(N)の運転支援サービスを含む全ての運転支援サービスのことを云う。また、実行対象の運転支援サービスに基づき選別が行われた場合には、その実行対象の運転支援サービスの数がステップST93で用いる格納対象運転支援サービス数となる。
【0068】
格納対象運転支援サービス数が1つしかない場合には、運転支援サービスの優先度に基づいた更なる選別ができない。従って、この場合、運転支援情報選別装置30は、選択された全ての運転支援情報に関する他車や設備等と自車との位置関係に基づいて、自車との相対距離が短い他車等に関する運転支援情報から順に容量を記憶装置21の記憶容量になるまで積算し、この様にして記憶装置21の記憶容量以下となるよう選択された自車との相対距離が短い運転支援情報を記憶装置21に格納する(ステップST94)。これにより、この運転支援システム5は、自車に近い他車等の運転支援情報から順に記憶装置21に残されるので、記憶装置21の記憶容量を増大させずとも、演算処理の負荷を軽減した状態で運転支援サービスを実行することができる。このステップST94においては、例えば、自車との相対距離が略同じ2台の他車が存在している場合、自車との相対車速等を観て、一方が自車と進行方向が同じであり、他方が自車と進行方向が逆の対向車であるならば、対向車に係る運転支援情報を優先的に記憶装置21へと格納させることが望ましい。
【0069】
ここで、この場合には、その後、記憶装置21内の不要になった運転支援情報を即時削除し、ステップST94で除外した運転支援情報を含む新たに受信された運転支援情報の中で運転支援サービスにおいて使用されるものが記憶装置21に格納されるようにする。これにより、この運転支援システム5は、運転支援サービスを実行し続けることができる。
【0070】
これに対して、格納対象運転支援サービス数が複数ある場合、運転支援情報選別装置30は、その夫々の運転支援サービスの優先度を調べ、優先度の低い運転支援サービスに係る選別対象領域(エリア)のみの運転支援情報を記憶装置21への格納対象から除外する(ステップST95)。その優先度とは、運転支援サービスのサービス内容の重要性により決まるものであり、例えばサービスが競合した場合にどちらを優先的に実行すべきかを表す指針となるものである。ここでは、例えば様々な種類の運転支援サービスの中で前述した安全系、エコ系、快適系、利便系の各運転支援サービスが対象になっていると仮定する。この場合には、安全系の運転支援サービスの優先度が最も高く、次にエコ系の運転支援サービスの優先度が高い。一方、快適系や利便系の運転支援サービスは、安全系やエコ系の運転支援サービスよりも優先度が低く、そのサービス内容の重要性や必要性に基づき優先度の高低が決められている。この様に、この運転支援システム5は、優先度の高い運転支援サービスを実行することができるので、演算処理の負荷を軽減しつつ、走行時の安全性を確保することができる。このステップST95においては、最も優先度の低い運転支援サービスに係る選別対象領域(エリア)のみの運転支援情報を削除してもよく、また、複数の運転支援サービスに係るものを除外しなければ記憶装置21に格納できないことが明らかな場合、複数の優先度の低い運転支援サービスに係る選別対象領域(エリア)のみの運転支援情報を削除してもよい。
【0071】
運転支援情報選別装置30は、このステップST95で運転支援情報の選別を行った後、ステップST91に戻り、記憶装置21への格納が終わるまで再び同様の演算処理が繰り返される。
【0072】
以上示した様に、この変形例においては、選択された全ての運転支援情報の容量が記憶装置21の記憶容量を超えている場合、格納対象運転支援サービス数が1つであるのか否かを判定することになる。例えば、その格納対象運転支援サービス数が複数存在していたときには、ステップST95において、夫々の格納対象運転支援サービスの中から優先度の低い格納対象運転支援サービスに係る選別対象領域(エリア)のみの運転支援情報が記憶装置21への格納対象から除外される。つまり、このステップST95においては、優先度の低い格納対象運転支援サービスがサービスの実行対象から除外されるので、その分だけ格納対象運転支援サービス数が減ることになる。
【0073】
このステップST95の演算処理によって、ここでは、記憶装置21への格納対象となっている上記の選択された運転支援情報の容量が小さくなっている。これが為、ステップST91で肯定判定されたときには、優先度の高い運転支援サービスの運転支援情報がステップST92で記憶装置21に格納される。しかしながら、上記の選択された運転支援情報の容量がステップST95の演算処理で小さくなったとしても、その全てを未だ記憶装置21に格納しきれない場合もある。この場合には、ステップST93で更に格納対象運転支援サービス数の判定を行い、ここで1つと判定されるまで又はステップST91で肯定判定されるまで、格納対象運転支援サービス数を減らしながらステップST91→ステップST93→ステップST95の演算処理を繰り返す。そして、最終的に格納対象運転支援サービス数が1つになるまで運転支援情報を減らしても記憶装置21に格納しきれないときには、ステップST94に進み、その運転支援情報の中から自車との相対距離が短い情報を選んで記憶装置21に格納する。
【0074】
従って、この変形例の運転支援システム5に依れば、記憶装置21の記憶容量を拡大させる等のシステムの改変を行わずとも、自車に対して優先度の高い運転支援サービスから適宜実行されることになる。
【0075】
以上示した運転支援システム1−5においては運転支援情報選別装置30等を車両に搭載しているが、運転支援情報選別装置30や記憶装置21は、運転支援センタに設けてもよい。この場合には、例えば、自車で実行対象になっている運転支援サービスについての情報が路側機を介して運転支援センタに送信され、その運転支援サービスに該当するものとして選択されている運転支援情報が運転支援センタから路側機を介して自車で受信される。そして、自車においては、その受信した運転支援情報に基づいて運転支援装置40が運転支援サービスを実行する。
【符号の説明】
【0076】
1,2,3,4,5 運転支援システム
10 通信装置
20 記憶装置
21 記憶装置
30 運転支援情報選別装置
40 運転支援装置
41 外部運転支援装置
50 支援機器
51 表示装置
52 音響装置
53 制御機器
71 指示装置
【特許請求の範囲】
【請求項1】
複数の運転支援情報を外部から受信する通信装置と、
前記各運転支援情報の中から運転支援サービスで使用される運転支援情報を選別する運転支援情報選別装置と、
前記運転支援情報選別装置で選択された前記運転支援サービスで使用される運転支援情報に基づいて当該運転支援サービスを実行する運転支援装置と、
を備えることを特徴とした運転支援システム。
【請求項2】
前記通信装置で受信した運転支援情報が格納される記憶装置を設け、
前記運転支援情報選別装置は、前記記憶装置に格納されている前記運転支援情報の中から前記運転支援サービスで使用される運転支援情報を選別し、これにより選択された前記運転支援サービスで使用される運転支援情報を前記運転支援装置に送信することを特徴とした請求項1記載の運転支援システム。
【請求項3】
前記運転支援情報選別装置で選択された運転支援情報が格納される記憶装置を設け、
前記運転支援装置は、前記記憶装置に格納されている運転支援情報に基づいて前記運転支援サービスを実行することを特徴とした請求項1記載の運転支援システム。
【請求項4】
前記運転支援装置が複数の前記運転支援サービスを実行するものである場合又は1つ以上の前記運転支援サービスを実行する前記運転支援装置が複数設けられている場合、前記運転支援情報選別装置は、前記運転支援サービスの種別毎に前記運転支援情報の選別を行うことを特徴とした請求項1,2又は3に記載の運転支援システム。
【請求項5】
前記運転支援情報選別装置は、実行対象となっている前記運転支援サービスの種別毎に前記運転支援情報の選別を行うことを特徴とした請求項4記載の運転支援システム。
【請求項6】
前記運転支援装置が複数の前記運転支援サービスを実行するものである場合又は1つ以上の前記運転支援サービスを実行する前記運転支援装置が複数設けられている場合、前記記憶装置に前記運転支援サービス毎の記憶領域を設ける又は夫々の前記運転支援サービス毎に前記記憶装置を備えることを特徴とした請求項1から5の内の何れか1つに記載の運転支援システム。
【請求項7】
前記運転支援情報選別装置は、選択された前記運転支援情報を自車の走行情報又は走行環境の内の少なくとも一方に応じて更に選別することを特徴とした請求項1から6の内の何れか1つに記載の運転支援システム。
【請求項8】
前記運転支援情報選別装置は、選択された前記運転支援情報の情報量に応じて更に当該運転支援情報の選別を行うことを特徴とした請求項1から7の内の何れか1つに記載の運転支援システム。
【請求項1】
複数の運転支援情報を外部から受信する通信装置と、
前記各運転支援情報の中から運転支援サービスで使用される運転支援情報を選別する運転支援情報選別装置と、
前記運転支援情報選別装置で選択された前記運転支援サービスで使用される運転支援情報に基づいて当該運転支援サービスを実行する運転支援装置と、
を備えることを特徴とした運転支援システム。
【請求項2】
前記通信装置で受信した運転支援情報が格納される記憶装置を設け、
前記運転支援情報選別装置は、前記記憶装置に格納されている前記運転支援情報の中から前記運転支援サービスで使用される運転支援情報を選別し、これにより選択された前記運転支援サービスで使用される運転支援情報を前記運転支援装置に送信することを特徴とした請求項1記載の運転支援システム。
【請求項3】
前記運転支援情報選別装置で選択された運転支援情報が格納される記憶装置を設け、
前記運転支援装置は、前記記憶装置に格納されている運転支援情報に基づいて前記運転支援サービスを実行することを特徴とした請求項1記載の運転支援システム。
【請求項4】
前記運転支援装置が複数の前記運転支援サービスを実行するものである場合又は1つ以上の前記運転支援サービスを実行する前記運転支援装置が複数設けられている場合、前記運転支援情報選別装置は、前記運転支援サービスの種別毎に前記運転支援情報の選別を行うことを特徴とした請求項1,2又は3に記載の運転支援システム。
【請求項5】
前記運転支援情報選別装置は、実行対象となっている前記運転支援サービスの種別毎に前記運転支援情報の選別を行うことを特徴とした請求項4記載の運転支援システム。
【請求項6】
前記運転支援装置が複数の前記運転支援サービスを実行するものである場合又は1つ以上の前記運転支援サービスを実行する前記運転支援装置が複数設けられている場合、前記記憶装置に前記運転支援サービス毎の記憶領域を設ける又は夫々の前記運転支援サービス毎に前記記憶装置を備えることを特徴とした請求項1から5の内の何れか1つに記載の運転支援システム。
【請求項7】
前記運転支援情報選別装置は、選択された前記運転支援情報を自車の走行情報又は走行環境の内の少なくとも一方に応じて更に選別することを特徴とした請求項1から6の内の何れか1つに記載の運転支援システム。
【請求項8】
前記運転支援情報選別装置は、選択された前記運転支援情報の情報量に応じて更に当該運転支援情報の選別を行うことを特徴とした請求項1から7の内の何れか1つに記載の運転支援システム。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】

【図7】

【図8】

【図9】
【図10】

【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−105456(P2013−105456A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−250979(P2011−250979)
【出願日】平成23年11月16日(2011.11.16)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月16日(2011.11.16)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]