
東京航空計器株式会社により出願された特許
1 - 3 / 3
慣性センサ,磁気センサおよび速度計を用いた移動体の姿勢推定装置および姿勢推定方法
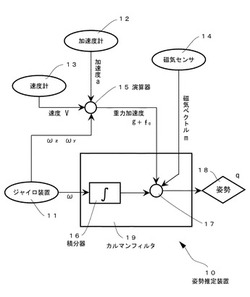
【課題】軽量,小型および安価であって、低精度なセンサ群とカルマンフィルタを組み合わせることにより姿勢情報の計算にあたって四元数を用い、センサの観測値から計算する修正量も四元数とすることにより高精度で移動体の姿勢誤差を推定し、十分な精度で移動体の姿勢を推定することができるジャイロ,加速度計,磁気センサおよび速度計を用いた移動体の姿勢推定装置および姿勢推定方法を提供する。
【解決手段】航空機にジャイロ装置11,加速度計12,磁気センサ14および速度計13を搭載する。演算器15,カルマンフィルタ19でこれらセンサに基づいた演算を行い、航空機の姿勢情報を計算する。姿勢情報の計算には四元数を用い、観測値から計算する修正量も四元数とすることにより、これを計算値に乗じることにより正確な姿勢を推定する姿勢推定装置を実現する。
(もっと読む)
流量計測装置および流量計測方法

【課題】 短い計測時間で高精度に流体噴射弁の噴射流量を計測する流量計測装置および流量計測方法を提供する。
【解決手段】 流量計測装置本体50のハウジング52の内部に形成された内部空間56は、隔壁54により第1流体室57と第2流体室58とに分離されている。第1流体室57にはポンプから噴射流体が供給され、第2流体室58から燃料噴射弁に噴射流体が供給される。フロート66は、隔壁54により、第1流体室57側および第2流体室58側に摺動自在に支持されている。受光部72は、発光部70が照射する平行光をフロート66が遮ることにより、平行光とフロート66の影との境界を検出する。燃料噴射弁が噴射すると第2流体室58の圧力が第1流体室57よりも低くなるので、この圧力差によりフロート66は第1流体室57から第2流体室58側に変位する。
(もっと読む)
高空域対応型の広速度域飛行速度ベクトル計測プローブと計測システム
【課題】 本発明が解決しようとする課題は、高高度域では大気圧が低くなることに起因して、四角錐台型5孔プローブを用いた従来システムの精度が低下してしまう問題点を解決し、計測精度低下を防ぐことのできる広速度域飛行速度ベクトル計測システムを提供すること、また、広速度域飛行速度ベクトル計測システムにおいて水滴、氷粒或いは塵埃付着による検出変動の影響を除去する手法を提示することにある。
【解決手段】 本発明の飛行速度ベクトル計測プローブはプローブの筒壁面に静圧孔をあけて、この静圧孔によって検出された圧力から静圧値を得るようにし、静圧/総圧信号と迎角値との4次多項式で近似された次式に基づいてマッハ数Mを演算すると共に、異常検出値を検知したときは前回検出値に置き換える手段を備えるようにした。
(もっと読む)
1 - 3 / 3
[ Back to top ]