
朝日技研株式会社により出願された特許
1 - 2 / 2
掘削システム
【課題】ハンマーグラブが地盤上を滑って十分に切削地盤を掴み取ることができないという従来構造の掘削システムの具備する課題を、簡易な改良構造のもとで効果的に解消することのできる、掘削システムを提供する。
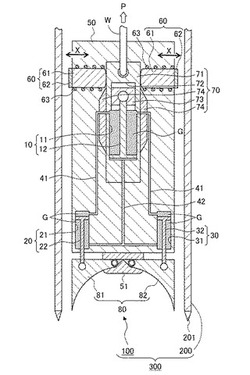
【解決手段】シリンダ機構20,30と、ピストンロッド22,32に装着されたシェル81、82からなるハンマーグラブ80と、別途のシリンダ機構10と、シリンダ21、31、11のそれぞれが固有のピストンロッドで内部を二分されてなるそれぞれの分割領域を流体連通する流路系41,42と、ピストンロッド12の一端が昇降する昇降空間72と、その外周に平坦区間とアプローチ区間を有する突起74と、を備えた昇降材70と、これらを一体とする基台50と、からハンマーグラブ制御機構100が形成され、ハンマーグラブ制御機構100と、これを収容するケーシング200と、から掘削システム300が構成される。
(もっと読む)
ハンマーグラブ制御システム

【課題】2つのシェルが固有のシリンダ機構にて姿勢制御されるハンマーグラブの制御システムに関し、簡易な構造で、各シェルのスムースで継続的な姿勢制御を保障することのできる、ハンマーグラブ制御システムを提供する。
【解決手段】制御システム200は、第1、第2、第3のシリンダ機構10、20、30と、これらの機構を構成するシリンダ内でピストン12,22,32にて分割された各第1の領域を流体連通する第1の流路系40、各第2の領域を流体連通する第2の流路系50と、第1、第2のロッド13,23に装着されたシェル61,62から構成されたハンマーグラブ60と、からなり、さらに、第2の流路系50に流体連通する第3の流路系90を介して第4のシリンダ機構80を備え、ハンマーグラブ60の姿勢制御の際に各ピストン12,22,32を進退させる際に不足する量の流体が第4のシリンダ機構80から提供されるようになっている。
(もっと読む)
1 - 2 / 2
[ Back to top ]