
株式会社寄田メンテナンスにより出願された特許
1 - 2 / 2
軌条型運搬装置
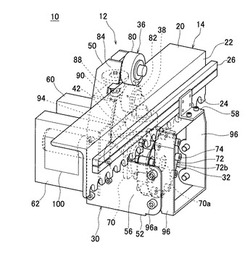
【課題】軌条の中間においても走行体を容易に取り換えることができ、軌条の自由度を増すことができる、軌条型運搬装置を提供する。
【解決手段】この軌条型運搬装置は、被運搬物をレール体14に沿って搬送するための走行体12と、レール体14とを備え、前記走行体12は、被運搬物を支持する移動本体30と、前記移動本体30を移動させるアクチュエータ32と、前記レール体14の噛合部24と噛合して、移動される噛合部34と、レール体14の中間点において、レール体14の挟持位置から接離自在となるように、移動本体30に固定された、第1レール挟持体40と、レール体14の中間点において、レール体14の挟持位置から接離自在となるように、移動本体30に固定された、第2レール挟持体46とを備えている。
(もっと読む)
自動搬送装置およびそれを利用したメッキ処理装置、並びに搬送ロボット

【課題】搬送機はライン専用として走行レール毎に設置され、搬送機を走行レールから簡単に取り外しできなかった。また搬送機は走行機構と昇降機構が一体となったものであるため、汎用性に劣っていた。
【解決手段】自動搬送装置は走行レール1と搬送ロボット2からなり、走行レールは、その側面にレール両端付近が無電部13となるよう給電線12が走行レールに沿って装着され、搬送ロボットは、上部ユニット21と下部ユニット22に分けて脱着可能にし、上位ユニットには給電線に加圧接触する受電子217と走行用モータ211と駆動車輪214からなる走行機構を、下部ユニットにはワークを上下に移動させる昇降機構を設け、走行機構及び昇降機構の駆動を制御する制御ユニット24は無線で制御機3と信号の授受を行うようにし、搬送ロボットが走行レールの端部から工具を使用しないで脱着できるようにした。
(もっと読む)
1 - 2 / 2
[ Back to top ]