
株式会社豊電子工業により出願された特許
1 - 10 / 21
インバータ制御装置およびこれを用いるインバータ制御方法
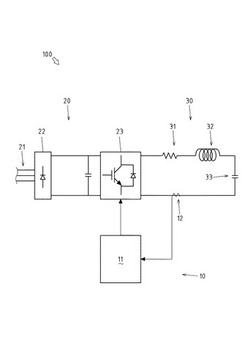
【課題】簡易な構成でインバータ制御を実現できるインバータ制御装置およびこれを用いるインバータ制御方法を提供する。
【解決手段】インバータ電源20によって駆動される誘導加熱装置100に対するインバータ出力電圧Vとインバータ出力電流Iとの位相差φを制御するインバータ制御装置10であって、前記誘導加熱装置100に流れるインバータ出力電流Iを検出する電流センサ12と、前記インバータ出力電圧Vと前記インバータ出力電流Iとの位相差φを制御するコントローラ15と、を具備し、前記コントローラ15は、前記インバータ出力電圧Vの周期Tの中間点tmを認識し、前記電流センサ12によって前記中間点tmにおける前記インバータ出力電流Iを認識し、前記インバータ出力電流Iに基づいて、前記インバータ出力電圧Vの周波数fを変更し、前記インバータ出力電圧Vと前記インバータ出力電流Iとの位相差φを制御する。
(もっと読む)
ハンド装置及び多関節ロボット

【課題】ライナー径を変更しても、設備の段替え作業や段替え交換後の調整等を必要とすることなく簡単に変更できるハンド装置及び多関節ロボットを提供する。
【解決手段】
ハンド本体2に、筒状のライナー5を挿入保持可能なチャックユニット31を、所定のピッチで複数並設したハンド装置であって、チャックユニット31に、ライナー5の挿入保持位置に対してライナー5の半径方向へ移動可能で、ライナー中心側への移動によってライナー5の端部を外側からクランプする複数のスライドプレート34を設けて、このスライドプレート34におけるライナー5の端部との当接部位を、ライナー5の端部外周面に当接するクランプ35と、ライナー5の軸方向の端面に当接する円形凸部35aとからなる段部形状としたことにある。
(もっと読む)
ハンド装置及び多関節ロボット
【課題】ライナーのピッチを設備の段替え作業や段替え交換後の調整等を必要とすることなく簡単に変更できるようにする。
【解決手段】ハンド本体2に、筒状のライナー5を挿入保持可能なチャックユニット31を、所定のピッチで複数並設したハンド装置1において、ハンド本体2に、チャックユニット31を並設方向へそれぞれ直線移動可能に設けるスライド機構10と、チャックユニット31を所定の位置に位置決めする位置決め機構15とを設け、この位置決め機構15を、並設方向に配置されて、並設方向での中心を境にして互いに逆向きとなるネジ部16,16を有し、このネジ部16に螺合させた一対のナット部18にチャックユニット31をそれぞれ連結したボールネジ17で形成して、ボールネジ17の回転により、ナット部18と共にチャックユニット31を同時に相反方向へ直線移動させて、ピッチを変更可能とした。
(もっと読む)
スプレーロボットにおけるスプレー移動経路生成方法及びスプレー移動経路生成装置
【課題】スプレー塗布する位置等を基本条件として予め決定し、スプレー塗布の順序をこの基本条件に従って決定することで、入力する人によってスプレー塗布の動作経路にバラツキを発生することがなく、品質とサイクルタイムとにバラツキが発生することもない、最適なスプレー塗布の順序を決定するスプレー移動経路生成方法及びスプレー移動経路生成装置を提供する。
【解決手段】
任意のスプレー位置を選択するST15と、移動パターンを選択するST16と、移動パターンにおいて、送りピッチを設定するST19と、移動パターンの始端に対応するスプレー位置を最初のスプレー位置として選択するST20と、スプレー順序を決定するST21と、を実行することにある。
(もっと読む)
マグネットチャック及び多関節ロボット、ワーク搬送装置
【課題】複数のワークの吸着搬送を簡単に可能とする。
【解決手段】マグネットチャック10は、回転機構11によって回転制御される回転軸12と、その回転軸12に放射方向へ連結される支持部材13,14と、を有し、各支持部材13,14の先端に、吸着面を放射方向外側へ向けて吸着及びその解除作業が単独で制御可能な電磁石15を夫々取り付けて、ワークWの吸着又はその解除動作を行うことにある。
(もっと読む)
ショットブラスト装置
【課題】ワークの出し入れが短時間で迅速に行え、作業効率に優れるショットブラスト装置を提供する。
【解決手段】ショットブラスト装置のターンテーブルに設けられるハンガーツリー14は、支柱16の上端に、周面にV溝19を周設した円盤状のコマ18を有する一方、支柱16の下部に固着された連結プレート20の両端に、下方へ向けて一対の連結棒21,21を固着して、ターンテーブルの連結台13に対して挿脱可能に立設される。よって、多関節ロボットがコマ18を把持することで、投射室に対してハンガーツリー14ごと出し入れ可能となる。
(もっと読む)
二番材除去方法及び装置
【課題】簡単且つ低コストで、振動や騒音も発生させずに二番材の除去を可能とする。
【解決手段】二番材除去装置1は、上下動可能な押圧ロッド5と、その押圧ロッド5の往復動作を制御する制御機構6とを備え、制御機構6は、多関節ロボットのハンド部24で鋳造品Wを固定した状態で、二番材W1に対して押圧ロッド5を下降させ、押圧ロッド5の先端が二番材W1に当接する位置で押圧ロッド5を一旦停止させた後、そこから再び押圧ロッド5を下降させて二番材W1を折り取るように押圧ロッド5を動作させる。
(もっと読む)
バリ取り用ツール
【課題】交差面間の際部のバリも確実に除去可能とする。
【解決手段】ツールTは、軸体に第1の刃部1,第2の刃部2,第3の刃部3を先端から順に形成したもので、第1の刃部1は、横断面外形が正方形に形成されて、軸方向から見て角となる4つの稜線部5,5・・が形成されるようになっている。また、第1の刃部1の周面には、先端側の内面がテーパとなる溝が、軸方向へ所定間隔をおいて複数形成されている。
(もっと読む)
ロボットアーム用ブラケット及びロボットアーム
【課題】簡単な構成で、ケーブル等を耐久性を低下させることなくロボットアームに適切に支持させることができ、関節部分でのメンテナンスにも支障ないようにする。
【解決手段】ブラケット1は、一対のリング3,3とそれを連結する軸方向の棒体4,4・・とで形成され、ロボットアームの関節の外周にその回転軸と同軸で取り付けられるフレーム状の円筒部2と、その円筒部2の側面に形成され、ケーブル等が円筒部2の軸心と交差状で、且つ円筒部2の周方向に遊びを持たせた状態で貫通可能な一対の案内孔7,7とを備えてなる。
(もっと読む)
洗浄機
【課題】洗浄液の噴射圧力に応じた適切な膜厚で流体カーテンを形成する。
【解決手段】洗浄ノズル18を、軸心に噴射口23を有し、下端外周を先広がりのテーパ状としたノズル本体19と、そのノズル本体19に外装されて内周にリング状の流路32を有し、下端内周をテーパ状とした外スリーブ31とから形成して、ノズル本体19の下端外周と外スリーブ31の下端内周との間に、洗浄液の噴射口23を中心としたリング状の第2噴射口38を形成し、外スリーブ31を、エアシリンダ27,27により所定の上下位置に軸方向にスライドさせることで、第2噴射口38の大きさを変更して流体カーテンの膜厚を調整可能とした。
(もっと読む)
1 - 10 / 21
[ Back to top ]