
コマツエンジニアリング株式会社により出願された特許
1 - 10 / 19
ガスシールド溶接用の溶接トーチ及びガスシールド溶接方法
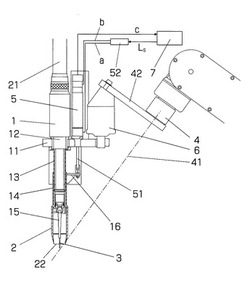
【課題】ガスシールド溶接で使用する溶接トーチの構造に関し、開先幅の制約を受けないで、開先の深い材料や開先が取られていない材料を最適な条件でガスシールド溶接を行うことができる単純な円形断面のガスノズルを備えた溶接トーチを得る。
【解決手段】
トーチ本体に対してトーチ軸方向に相対移動可能なガスノズルを備えている。ガスノズルは、トーチ軸方向のガイド筒に摺動自在に嵌挿して設けるか、軸方向に伸縮可能な蛇腹構造などにより、ノズル口が進退自在である。このガスノズルは、NC制御によりストローク制御可能なサーボシリンダなどの進退駆動装置に連結されて、ノズル口が移動及び位置決めされる。狭くて深い開先の底の部分を溶接するときは、ガスノズルを後退させ、ノズル口から溶接ワイヤを長く突出させた状態で溶接を行う。
(もっと読む)
溶接ワイヤの曲がり矯正器

【課題】ワイヤリールやパックから引き出した溶接ワイヤの曲がりや捩れを矯正する装置(ストレートナー)に関し、各方向の溶接ワイヤの巻癖を安定して良好に矯正することができ、コイルから引出したワイヤに残っている曲がり及びねじれに起因するワイヤ振れの発生を防止して溶接品質の低下を防止する。
【解決手段】ロール配置面となる同一平面上で千鳥に配置されて、両側に隣接するロールとの間で当該ロール間を通過する溶接ワイヤに交互に逆方向の曲げを付与するように配置された4個以上のロールを備えた矯正ユニットを、3個以上備えている。この3個以上のユニットは、ワイヤ送り方向に直列に配置されており、溶接ワイヤは、この3個以上のユニットを順に通過することによってその曲がりが矯正される。
(もっと読む)
H形鋼用の端部把持装置及びポジショナ
【課題】断面寸法の異なるH形鋼の断面中心をほぼ定位置にして把持する自動センタ出し機能を備えたコンパクトな把持装置及びそのような把持装置を備えたコンパクトで設置面積の小さなH形鋼用のポジショナを提供する。
【解決手段】H形鋼6のウェブを板厚方向に把持する把持具の一対と、この一対の把持具31の間隔を間隔中心24に対称に拡縮する装置を備える。各把持具は、定姿勢で移動する固定側爪32と対向して開閉される開閉側爪34とを備える。各固定側爪外側にフランジ押接部38を備える。両把持具を拡開方向に移動して、各把持具のフランジ押接部でH形鋼の対向するフランジの内側面を押接し、その状態で開閉側爪を閉じてウェブを把持する。ポジショナは、架台に支持されて水平旋回軸回りに回動する旋回体を備え、この旋回体に一対の把持爪を装着した構造である。
(もっと読む)
溶接装置
【課題】比較的大型のワークを溶接可能で、溶接作業及び取扱いが容易であり、装置寸法を小型化する。
【解決手段】ワーク7を載せるテーブル4を回転自在に軸支している固定の基台3に溶接ロボット5を搭載する。テーブル4は、基台に軸支された水平方向の旋回軸の軸端に固定されており、基台の上面は水平面とされ、当該上面に溶接ロボットのベースが固定されている。溶接ロボットは、ベースに対する鉛直旋回軸回りの旋回と、2本のアームの揺動と、手首フランジの旋回と2次元方向の揺動とにより、溶接トーチの3次元方向の位置と姿勢を制御する、6軸制御のロボットである。
(もっと読む)
溶接ロボット及び溶接におけるウィービング動作の制御方法
【課題】ウィービング動作に特徴がある溶接ロボット及び溶接方法に関し、ウィービング動作に伴うトーチと被溶接部材との干渉によって予定した軌跡でのウィービング動作が行われないことによる溶接品質の低下やトーチ先端の損傷を避ける技術手段を得る。
【解決手段】ウィービング動作に基づくトーチ先端と被溶接部材との干渉を避けるための補正角θbを溶接ロボットの制御器に設定する。溶接ロボットの制御器は、ウイービング座標上でのYw軸回りの補正角θ=θbsinωtを算出し、Yw軸回りにθだけトーチを揺動させて次の微小時間後のトーチ姿勢とする。
(もっと読む)
微細加工装置および微細加工方法
【課題】ワーク上の絶対的な加工位置に対して精度の高い位置決めを簡易に行うことができる微細加工装置、微細加工方法および微細加工プログラムを提供すること。
【解決手段】載置されたワークWを加工するレーザ光を出射するレーザ光源11と、ワークWの加工領域を含むワークW上の画像を取得する撮像部22と、レーザ光源11とワークWとの間に配置され、前記レーザ光が照射可能な全領域のうち、少なくともワークWの加工領域に対応させて前記レーザ光を透過させる透過領域16以外の領域で前記レーザ光をマスクする液晶マスク13と、撮像部22で取得された画像の領域と液晶マスク13の領域との位置関係を対応付ける対応付け部41と、対応付け部41による位置関係をもとに、液晶マスク13の透過領域16を前記画像上の加工領域に一致させるマスク制御部42と、少なくとも透過領域16に前記レーザ光を照射する加工制御部43と、を備える。
(もっと読む)
ガスシールとアーク溶接方法
【課題】トーチ先端がトーチの進行方向(溶接方向)に対して前後関係となるように並置した複数の溶接トーチを同期移動させて行う溶接方法に関し、アーク干渉を生じさせないで溶接電流を増大させることにより、タンデムアーク溶接の溶接効率を向上させる。
【解決手段】トーチの進行方向Bを含む面内で逆ハ字状に配置された2本のトーチの進行方向前側のトーチ2fの少なくとも先端部の軸線がトーチ進行方向Bに対して直角となるか、または前トーチ2fの先端部軸線が、その先端側(母材側)がトーチ進行方向の前方となる方向に傾斜させてガスシールドアーク溶接、特に好ましくは炭酸ガス溶接を行う。前トーチ2fと後トーチ2rの少なくとも先端部の軸線が逆ハ字状を呈していることから、後トーチ2rの軸線は、その先端側がトーチ進行方向前方となる方向に前トーチ2fより更に傾斜する。
(もっと読む)
画像処理装置及び動画像表示方法
【課題】動画像のあるフレームにおいて登録された地物の情報を、高速且つ高精度で他のフレームに対しても表示させる。
【解決手段】ステレオ動画像記憶部150と、動画像に写っている地物のグローバル座標を記憶した地物情報記憶部104と、撮影位置のグローバル座標を記憶した撮影位置座標記憶部161と、カメラ姿勢角記憶部162と、地物のグローバル座標を撮影位置を基準としたローカル座標に変換する座標変換部105と、地物のローカル座標に基づいて、動画像内の地物の位置を特定する3D-2D変換部106と、動画像データに基づいて表示装置6に前記動画像及び地物の位置に所定の画像を表示させる動画再生部108と、を備える。
(もっと読む)
計測システム、画像処理装置及び方法
【課題】トータルステーションとカメラとを一体とした計測装置を用いた3次元計測を効率的に行う。
【解決手段】計測装置1は、複数のデジタルカメラを備えたステレオカメラ11と、ステレオカメラ11と所定の位置関係を持って備えられたトータルステーション(以下、TSという)13とを備える。計測装置1で撮影されたステレオ画像を処理するコントローラ3は、計測装置1から、ステレオカメラ11で撮影したステレオ画像の画像データと、ステレオ画像を撮影した時にTS13が計測したTSデータを取得し、取得した画像データ及びTSデータに基づいて、ステレオ画像に写っている計測対象物の、撮影現場における現場座標系での3次元データを生成する2D−3D変換処理部334と、生成された3次元データに基づいて、計測対象物の3次元画像を出力する表示制御部337と、を備える。
(もっと読む)
プラズマトーチ
【課題】プラズマアークジェットを細く絞る性能を良好に維持できる期間を長くし、ノズルを交換すべきインターバルを長くする。
【解決手段】ノズル(32)の前端部(32A)を包囲する保護キャップ(34)の前端部(52)がセラミックス製である。保護キャップ(34)の内面のキャップオリフィス(54)を囲む円環状領域(60)が、ノズル(32)の外面のノズルオリフィス(44)を囲む領域と密着する。キャップオリフィス(54)の内径が、ノズルオリフィス(44)の内径とほぼ同じかその近傍である。キャップオリフィス(54)はノズルオリフィス(44)と協働してプラズマークを細く絞る。保護キャップ(34)の円環状領域(60)の外側の複数のアシストガス噴出孔(56)から、アシストガスが噴出する。
(もっと読む)
1 - 10 / 19
[ Back to top ]