
オートモーティブ システムズ ラボラトリー インコーポレーテッドにより出願された特許
1 - 10 / 28
道路使用弱者保護システム
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
道路曲率推定システム

【課題】予測衝突検知システムにおいて、道路の曲率を推定する
【解決手段】道路曲率パラメータは、ホスト車両軌跡のカーブフィットから、または状態変数が複数のホスト状態変数(72)に応答性のある、第2のカルマンフィルタ(54、54.1)から推定される。カルマンフィルタ(52、52.1、54、54.1)には、適応スライドウィンドを組み入れることができる。最も可能性の高い道路種類の曲率は、異なる道路種類のモデルを使用する相互作用多重モデル(IMM)アルゴリズムによって推定される。道路曲率融合サブシステムは、ホスト車両状態、車両位置に応答性のあるマップデータベース、またはレーダーシステムによるターゲット車両の計測値のいずれかを使用する、複数の道路曲率推定器からの道路曲率推定値を融合させる。
(もっと読む)
道路曲率推定システム

【課題】道路曲率パラメータを推定する。
【解決手段】第1のカルマンフィルタ52、52.1を使用するプロセッサ26が、ホスト車両状態を、速度Uおよびヨーレートωから推定し、ヨーレートωは速度Uが大きい場合にはヨーレートセンサ16からとし、小さい場合には操舵角センサと速度Uからとする。道路曲率パラメータ(C0、C1)は、車両軌跡のカーブフィットから、または状態変数が複数のホスト状態変数に応答性のある、第2のカルマンフィルタ54、54.1から推定される。カルマンフィルタ52、52.1、54、54.1には、適応スライドウィンドを組み入れる。道路種類の曲率は、異なる道路種類のモデルを使用する相互作用多重モデルIMMアルゴリズムによって推定される。ホスト車両状態、車両位置マップデータベース、レーダーシステムによるターゲット車両の計測値のいずれかの複数の道路曲率推定器(からの道路曲率推定値を融合させる。
(もっと読む)
道路使用弱者保護システム
【解決手段】視覚的場面の距離マップがステレオビジョンおよび協働する画像処理システムにより生成され、関心領域外および衝突が不可能の対象物がフィルターにより取り除かれ、また道路表面も取り除かれる。距離ビンにクラスター分けされた対象物がセグメンテーションにより分離される。
【効果】主要コンポーネント解析によってコンポジット距離マップが生成され、連結コンポーネント篩い分けフィルタにより処理される。対象物は一つ又は複数のハーモニックプロファイルおよびほかの特性を用いて、インクルーシブ、エクスクルーシブ及びハーモニックネットワークの組み合わせで種類分けの基準を生成し、認識プロセッサを用いて判別される。
(もっと読む)
道路使用弱者保護システム
【課題】車両と道路使用弱者との衝突を回避する道路使用弱者保護システムを提供する。
【解決手段】視覚的場面の距離マップがステレオビジョンおよび協働する画像処理システムにより生成され、関心領域外および衝突が不可能の対象物がフィルターにより取り除かれ、また道路表面も取り除かれる。距離ビンにクラスター分けされた対象物がセグメンテーションにより分離される。主要コンポーネント解析によってコンポジット距離マップが生成され、連結コンポーネント篩い分けフィルタにより処理される。対象物は一つ又は複数のハーモニックプロファイルおよびほかの特性を用いて、インクルーシブ、エクスクルーシブ及びハーモニックネットワークの組み合わせで種類分けの基準を生成し、認識プロセッサを用いて判別される。
(もっと読む)
道路曲率見積もりシステムおよび自動車目標状態見積もりシステム
【課題】道路の曲率を見積もる。
【解決手段】第一のカルマンフィルター(52)は、ヨーレートおよび速さの測定値をホスト車両内のそれぞれのセンサー(16、18)の測定値から見積もり、第二のカルマンフィルター(54)はそれらから道路曲率のクロソイドモデルのパラメータを見積もる。レーダーシステム(14)からのレンジ、レンジレートおよびアジマス角の測定値は、目標車両36の状態の非束縛の見積もりを提供するために拡張されたカルマンフィルター(56)によって処理される。関連する道路に束縛された目標の状態の見積もりは一または二以上の道路のレーンについて発生され、独立でまたは組み合わせで非束縛の見積もりと比較される。もし束縛された目標の状態の見積もりが非束縛の見積もりに対応しているなら、目標車両の状態は非束縛及び束縛の見積もりの統合で発生され、そうでないならば、非束縛の見積もりのみで与えられる。
(もっと読む)
衝突判定に有効なエンベロープの検出器
【課題】車両搭乗者安全装置の動作制御に有効な受信車両加速度情報(a(t))のエンベロープを検出する。
【解決手段】受信された車両加速度情報(a(t))に関する連続値を一対のランク付け順フィルタ(14,16)に記憶してランク付けし、記憶値の最新半部の中から最高ランク付け値(aH)を、また最古半部の中から最高ランク付け値(aH′)を算出する。最古半部の最高ランク付け値の絶対値をとって最新部の最高ランク付け値から差し引き(24)、修正ジャーク測定値(jH*)を得る。こうして算出された修正ジャーク値の絶対値をとって(26)、受信された加速度情報のエンベロープを追跡する測定値(m1)を得る。
(もっと読む)
電動シートベルト張力装置
【課題】危険のない状態では、張力を加えず、衝突の可能性のある時には、シートベルト張力を増大させる。
【解決手段】 車両シートベルトへの張力印加を制御する装置10は、制御プロセッサ20およびモータ12を使用してシートベルトに初期張力を加える。初期張力印加後、制御プロセッサ20はシートベルトに加わるすべての張力を実質的に除去する一方、エンコーダ18を介してシートベルトのペイアウトを連続的に監視する。該装置は位置ずれ警報を発信し、また衝突判別装置22および/または物体検出レーダー装置26からの車両加速情報に応答してシートベルトの張力印加を制御する。該装置はさらに交換可能発火カートリッジ38をもつ発火予張力装置32を用いることにより早期のシートベルト張力作動を行うものである。
(もっと読む)
磁気衝突センサー
少なくとも1つの時間変化する信号(24)が、車両(12)と協働する関係にあって異なった場所(18.1、18.2、18.3、18.4、18.k)に広がって設けられた複数のコイル構成要素(14)に加えられる。コイル構成要素(14)は、車両(12)と相互作用する、対応する複数の磁場成分(30.1、30.2、30.3、30.4、30.k)を生成する。少なくとも1つの検知回路(32、32.1、32.2)が、コイル構成要素(14)からの信号成分に応答して検知信号(38)を発生させ、車両(12)の時期的状態の変化の検出を可能にする。 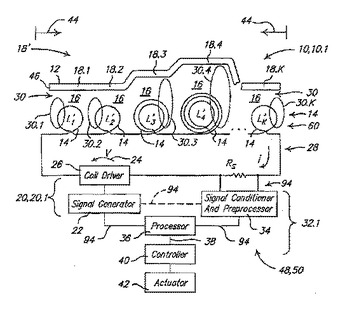 (もっと読む)
(もっと読む)
アンテナ
アンテナ(10)は、第1の表面(40)および第2の表面(52)を有する誘電体材料(16)と、第1の表面(40)に動作可能に結合された離散形レンズアレイ(14)と、第2の表面(52)に動作可能に結合された少なくとも1つの横形給電アンテナ(18)とを含む。  (もっと読む)
(もっと読む)
1 - 10 / 28
[ Back to top ]