
フフ・ヒユルスベツク・ウント・フユルスト・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング・ウント・コンパニー・コマンデイトゲゼルシヤフトにより出願された特許
1 - 5 / 5
車両の錠を開けかつ車両の外側範囲を画像で検出する装置
この装置は、取っ手(20)の操作の際錠を開け、また必要な場合カメラ(31)を介して車両の外側範囲を画像により検出する、二重の機能を持っている。これら両方の課題の最適な解決のため及び空間を少なくする構成のため、取っ手(20)を受入れる支持殻(10)の後壁に穴を形成し、この穴にモジュールハウジング(23)を取付けることが提案される。モジュールハウジング(23)内に、カメラ(31)が、カメラ保持体(32)を介して、進入位置(31.1)と進出位置(31.2)との間で揺動可能に支持され、かつ並進運動するように案内されている。モジュールハウジング(33)には、カメラ(31)の回転−並進運動(32.2)用の駆動装置(30)及び伝動装置もある。  (もっと読む)
(もっと読む)
車両にある扉又は揺動蓋用の取っ手
車両の扉又は揺動蓋用の開閉器(20)を統合された取っ手において、押しボタン開閉器は実質的に2つの互いに差込み可能な構造単位体から形成される。第1の構造単位体(21)は3つのプラスチック成分から成る一体の射出成形品から成り、変形しないハウジングと弾性膜を含んでいる。膜はハウジング(22)をその一方の端部で底のように閉鎖し、構造単位に殻形状を与える。第3のプラスチック成分として、膜にある変形しない押圧操作体(24)が用いられる。第2の構造単位体(31)は、ケーブル(19)を接続される基板(33)と、その上に取付けられるマイクロスイッチ(30)から形成されている。第2の構造単位体(31)は第1の構造単位体(21)の殻内部(26)へ挿入され、基板(33)は殻開口(28)の方へ向いており、殻状構造単位体(21)の殻縁(43)から突出せしめられる。両方の構造単位体(21,31)のこのはめ合わせ状態は、挿入される基板(33)を少なくとも部分的に覆う確保板(37)によって確保される。その場合殻状構造単位体(21)の残っている殻縁残部は型として役立ち、成形材料(48)を収容し、成形材料は、その硬化後に殻開口(28)を閉鎖する。  (もっと読む)
(もっと読む)
車両にある電気又は電気−機械立入りシステムを操作する装置
車両にある電気又は電気−機械装置(10)の操作装置において、接近又は接触に反応するセンサ(40)が使用される。センサ(40)の始動が実際に人間の手によって行われるか又は誤り物体によって行われるかを、装置が明確に区別できるようにするため、装置の最初の設定段階において、反応するセンサ(40)の時間的信号経過において少なくとも若干の所定の時点に生じる信号の少なくとも1つのデータセットを検出してメモリに記憶することが提案される。こうして操作に特徴的な良データのセット及び/又は誤りに特徴的な不良データのセットが得られる。装置の後になっての使用中に、センサ(40)の反応の際、類似な信号の実際データセットが、時間的経過を、設定段階におけるのと同じ所定の時点に検出される。この実際データセットが、制御器において記憶されているデータセットの少なくとも1つと比較される。実際データセットが良データセットと一致しかつ/又は不良データセットの内容ではない時にのみ、装置(10)の操作が制御器により解放される。  (もっと読む)
(もっと読む)
車両の扉及び/又ははね上げ蓋にある電気又は電気−機械錠掛け装置を操作する装置
車両の扉及び/又ははね上げ蓋にある電気又は電気−機械錠掛け装置を操作する装置において、接近又は接触に反応するセンサ(40)が使用される。センサ(40)の始動が実際に人間の手により行われるか誤った物体により行われるかを装置が明白に区別できるようにするため、主センサ(40)の接触の作用範囲にセンサ素子として補助センサ(50)を設けることが提案される。  (もっと読む)
(もっと読む)
車両の扉又は揺動蓋用の錠
扉を閉じる際、錠部分(10)が回転掛け金(20)へ入り込み、それにより回転掛け金が開放位置からまず予備係止位置へ揺動される。回転掛け金(20)は開放位置の方へばね荷重(25)を受け、通常は予備係止部(21)を爪(30)に支持されている。電動引き閉じ補助装置により、伝動装置(53)及び偏心輪(50)を介して、回転掛け金(20)が本係止位置まで更に回転せしめられ、爪(30)が回転掛け金(20)の本係止部22に係合する。確実で多様に使用可能な錠を得るために、偏心輪(50)と回転掛け金(20)との間にひじ継手・レバー対(40)及び弾性連行体(33)を設けることが提案される。ひじ継手・レバー対(40)は、その一方の自由端(41)を定置支持体(14)に回転可能に支持され、その他方の自由端(42)は案内手段(15)により強制案内され、ばね荷重を受ける連行体(33)を同時に支持する。ひじ継手・レバー対(40)は偏心輪(50)の制御曲面(51)に支持されている。ひじ継手・レバー対が伸張するか又は屈曲することにより、強制運動が起こる。その場合連行体(33)が回転掛け金(20)をつかみ、これを電動機により予備係止位置から本係止位置へ導く。 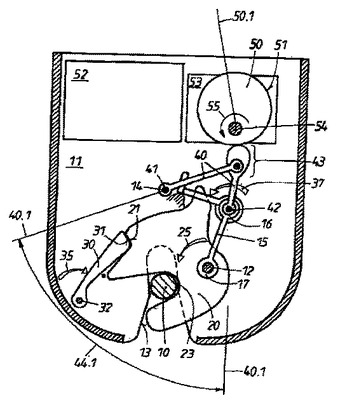 (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]