
元田技研有限会社により出願された特許
1 - 2 / 2
無慣性タイプの荷重取扱装置
【課題】 重量の大きな荷重を負荷部に支持し、この荷重に作業者が手を添えてその荷重を移動させる場合においても、負荷部の昇降動作のほか、水平面内での2軸方向の動作をサーボ制御、好ましくは速度サーボ制御される駆動力(モータ出力)によって行うことにより、負荷による水平面内での移動に伴う慣性が前記作業者に作用する影響が殆んどないか乃至は影響を極力小さく抑制した、いわば無慣性バランサー乃至は無慣性タイプの荷重取扱装置を提供すること。
【解決手段】 平行リンク機構を含んだ関節形アーム機構AM1,AM2,AM3の先端側に負荷部5を設けた荷重取扱装置において、前記負荷部5の昇降駆動源と水平面内におけるX,Y軸方向の移動駆動源にサーボ制御されるモータなどによるサーボ制御駆動源を設け、前記負荷部5を前記駆動源のサーボ制御される出力を利用して昇降方向での移動と水平面内での移動をさせることにより、前記負荷部5を手で支える操作者に負荷の水平面内での移動による慣性を感じさせないようにしたこと。
(もっと読む)
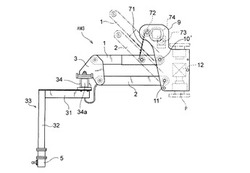
荷重取扱装置におけるアーム自重のバランス方法とその機構

【課題】 仮想定比槓杆タイプのアーム機構を備えた荷重取扱装置における上記のようなアーム流れ現象を生じさせないアーム機構の新たなバランス方法とそのための機構を提供すること。
【解決手段】 複数のアーム1〜7がリンク結合された仮想定比槓杆タイプのアーム機構Amであって、その姿勢を変化させることができるアーム機構Amのアーム先端側に支持させた負荷Wを、そのアーム機構Amの後端側に伝達される昇降駆動力13によって昇降させるとき、そのアーム機構自体の自重を、前記昇降駆動力13とは別に設けた駆動力24によって支持することにより、当該アーム機構自重と前記の別の駆動力24とを平衡させること。
(もっと読む)
1 - 2 / 2
[ Back to top ]