
ピルツ ゲーエムベーハー アンド コー.カーゲーにより出願された特許
1 - 10 / 49
運動変数のフェールセーフモニタリングのための安全回路およびモニタリング方法
【課題】可動機械部品の運動変数、特に回転速度のフェールセーフモニタリングのための安全回路(10)を提供する。
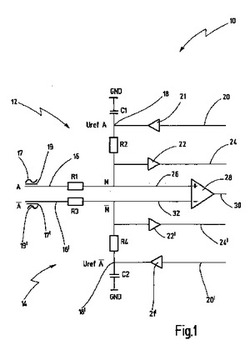
【解決手段】モニタリングするべき運動変数を表すエンコーダ信号(A)を供給する信号入力(16)と、基準電圧(UrefA)を供給する基準電圧路(20)と、エンコーダ信号(A)に基準電圧(UrefA)を重ね合わせることによって重畳信号を提供するために、信号入力(16)および基準電圧路(20)に接続されているタップ(M)と、タップ(M)に接続されて、重畳信号が少なくとも1つの所定の信号レベルに達するかどうかまたは所定の信号レベル範囲内にあるかどうかを検出するように設計されている測定ユニット(22)とを備える。
(もっと読む)
電気駆動装置の運動変量のフェイルセーフ監視方法および装置

【課題】簡単かつ費用対効果に優れた電気駆動装置(14)のトルクのフェールセーフ監視方法を提供する。
【解決手段】電気駆動装置(14)の第1の駆動電流(Ia)および第2の駆動電流(Ib)をそれぞれ表す第1の測定信号(32a)および第2の測定信号(32b)が測定装置(32)によって測定される。これら第1および第2の測定信号(32a、32b)の関数として、磁界生成直軸電流成分(Id)およびトルク生成横軸電流成分(Iq)が決定され、運動変量の実際値が決定される。測定装置(32)の検査を行う規定の試験パターン(64)を形成する可変試験電流成分(66)を用いて上記駆動電流(Ia、Ib)の少なくとも一方が生成される。この試験電流成分(66)は、上記規定の試験パターン(64)が直軸電流成分(Id)中に現れる一方、当該試験パターンが横軸電流成分(Iq)には実質的に含まれないように選択される。
(もっと読む)
空間領域を監視する方法および装置
【課題】空間領域に実質的に平行なエッジを有する構造物が存在する場合でも、できるかぎり単純かつ費用効果的に確実な空間領域の監視を可能にする。
【解決手段】空間領域を監視するために、互いに決められた距離だけ離して配置されている第1および第2の画像記録ユニットが提供され、空間領域の第1画像(40')は第1画像記録ユニットで記録し、第2画像は第2画像記録ユニットで記録する。第1および第2の画像に基づいて複数の物体の位置を判定し、各物体の位置は画像記録ユニットに対する物体(42,44)の空間距離を表し、物体の位置に応じて、スイッチング信号が生成される。空間領域は実質的に平行な複数のエッジ(48a, 48b)を有する少なくとも1つの構造物(46)を有し、構造物(46)に複数の参照マーク(56)が配置されている。画像記録ユニットと参照マーク(56)との間の複数の参照距離を判定し、参照距離に基づいて構造物(46)の構造位置を判定する。
(もっと読む)
自動化設備の工業用コントローラをプログラムする方法および装置
【課題】複雑なアプリケーション・プログラムの時間効率の良いデバッグを行う。
【解決手段】デバッグ用ツール(52)を起動している間に自動化設備(10)を制御するコントローラ(14)上で機械コード・プログラム(38)を実行する。デバッグ用ツール(52)はコントローラ(14)上で走る機械コード(38)と、プログラム・エディタ内に表示された少なくとも1つの高レベル制御命令(46)と、の間の逆関係を決定する。デバッグ用ツール(52)はコントローラ(14)内のデータ・メモリ(38)からセンサ・データを読み込むとともに、少なくとも1つの高レベル制御命令(46)にセンサ・データを割り当てて、それにより、少なくとも1つの高レベル制御命令(46)を機械コード・プログラム(38)の実行時の実際のシステム状態にリンクさせる。
(もっと読む)
自動化システムを制御する安全コントローラおよびユーザプログラムを生成する方法
【課題】より簡単でより速い始動を行うことができる安全コントローラおよびそのためのユーザプログラムを生成する。
【解決手段】少なくとも一部が各自のデータバス・インターフェース(46)を有しており、前記データバス・インターフェース(46, 46’, 46’’, 46’’’, 46’’’’)はそれぞれデータを送受信するように設計されている複数の制御コンポーネント(26)と、データ交換のために前記各自のデータバス・インターフェース(46, 46’, 46’’, 46’’’, 46’’’’)を介して前記複数の制御コンポーネント(26, 28, 80, 82, 90, 92)が接続されているデータバス(34, 116)と、アソシエーションデータ(120)に基づいて確認され、さらに前記構成データ(58)はデータバス(34, 116)または少なくとも1つのデータバス・インターフェース(46)の少なくとも1つの特性を判定する構成データ(58)を受信するように設計されている構成インターフェース(124, 130, 136)とを有する。
(もっと読む)
安全関連制御ユニット用アプリケーションプログラムの生成方法および装置
【課題】ユーザプログラムの生成ひいては安全コントローラの製造の柔軟性をさらに向上させて安全コントローラの迅速かつ安価なプログラミングを可能とする。
【解決手段】ユーザプログラムのソースコード(52)を生成するステップであって、前記ソースコード(52)が前記アクチュエータ(24)を制御するための複数の制御命令(160, 162)および診断レポートを生成するための複数の診断命令(164, 166)を含み、前記制御命令(160, 162)の実行中に安全関連プログラム変数がフェイルセーフ的に処理されるステップと、前記ソースコード(52)に基づいてマシンコード(70)を生成するステップと、少なくとも1つのチェックサム(102, 104)を決定するステップであって、前記チェックサム(102, 104)が前記マシンコード(70)の少なくとも一部に対して決定され、前記チェックサム(102, 104)の決定に際して前記診断命令(164, 166)が無視されるステップと、を含む方法。
(もっと読む)
安全コントローラおよび自動化設備を制御する方法
【課題】安全コントローラの応答時間を短縮すると同時に安全コントローラを実装するコストを低減し、それによってその応用性に関して最適にされた、より高速でよりフレキシブルな安全コントローラを提供する。
【解決手段】少なくとも一部のコントローラハードウェアコンポーネント(26)が各自のプロジェクトデータメモリ(52, 52’, 52’’, 52’’’, 52’’’’)を有しており、前記プロジェクトデータメモリ(52, 52’, 52’’, 52’’’, 52’’’’)のそれぞれはプロジェクトデータ(130)を記憶するように設計されている。前記コントローラハードウェアコンポーネント(26)を互いに接続する接続ユニット(34)と、前記接続ユニット(34)を介して前記プロジェクトデータ(130)を前記プロジェクトデータメモリ(52, 52’, 52’’, 52’’’, 52’’’’)に分配するように設計されている分配ユニット(52, 142)と、を含む。
(もっと読む)
安全関連制御ユニットおよび自動化設備の制御方法
【課題】安全関連制御ユニットの外部で発生した故障に対する適用性を高めると同時にコストを低減する。
【解決手段】複数のセンサ(16)および複数のアクチュエータ(14)を備え、前記アクチュエータ(14)を制御するための複数の制御命令(44, 46, 48)を含み、複数の第1プログラム変数を処理することにより前記制御命令の少なくとも一部(44)を実行するように設計されている第1プロセッサ(20)を備える。第一プロセッサ(20)は第1の規定タイミングに少なくとも1つの前記第1プログラム変数(FSV1A)に対して存在する瞬時値(FSV1A(n))に応じて前記第1プログラム変数(FSV1A)の第1試験値(CRCFSV1A(n))を決定するように設計されている。さらに前記第1試験値(CRCFSV1A(n))に対応する第2試験値(CRCFSV1B(n))を決定するように設計されている前記第2プロセッサ(22)と、前記瞬時値(FSV1A(n))、前記第1試験値(CRCFSV1A(n)、および前記第2試験値(CRCFSV1B(n))を記憶するように設計されているデータメモリ(92)とを備える。
(もっと読む)
安全コントローラ用のユーザプログラムを作成するための方法および機器
【課題】安全作業を達成するために、複数のセンサ(26)および複数のアクチュエータ(24)を有する自動化された設備(22)を制御するよう設計された安全コントローラ(20)用のユーザプログラムを作成する。
【解決手段】前記ユーザプログラムは、安全関連のプログラム変数がフェールセーフな仕方で処理される第1プログラム部分(74)と、安全関連でないプログラム変数が処理される少なくとも1つの第2プログラム部分(78)とを備え、ユーザプログラムが実行されたときに割り当て条件に基づき、選択された第1の安全関連でないプログラム変数の瞬時値が選択された安全関連のプログラム変数に割り当てられる。
【効果】安全関連のプログラム変数、およびそれにより表された安全関連の信号が利用可能なだけでなく、安全関連でないプログラム変数、およびそれにより表された安全関連でない信号も利用可能である。プログラミング個別安全作業を実施するための選択肢の数が増加する。
(もっと読む)
安全制御装置用ユーザープログラムの作成方法および装置
【課題】本発明の方法は、安全関連の機能を有するユーザープログラムの作成過程の複雑性をさらに低減可能であるとともに、非常に複雑な用途向けの安全制御装置のプログラミングを簡単、迅速、かつ優れた費用対効果で行える。
【解決手段】本発明の方法および装置は、発生するプログラミングタスクのマトリクス状構成を備えており、一方では特定のハードウェアコンポーネントにそれぞれ割り当てられたソフトウェアコンポーネント(146、174)に、他方では部分機能面に応じたグループ化プログラミングを可能とする機能面ブロック(92、112、136、180、198、408)に分割される。各機能面ブロック(92、112、136、180、198、408)は、互いに異なる複数の制御面の1つを表し、各前記制御面は、安全制御装置の個々の補助機能を表す。
(もっと読む)
1 - 10 / 49
[ Back to top ]