
ジョンソン コントロールズ オートモーティブ エレクトロニクスにより出願された特許
1 - 7 / 7
電子励起式モータ
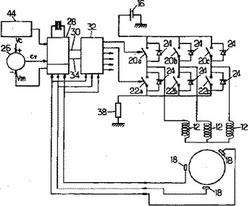
【課題】低負荷のもとでの優れた効率と高速での大きなトルクとを同時に得ることを可能にするのを提供することである。
【解決手段】三相の巻線で成るコイルと、ロータ位置センサ(18)と速度基準信号(Vc)とに結合された入力を有しかつプロセッサ(28)の制御下で位相を進める電源回路を含む電子制御モジュールとを有するステータ−ロータアセンブリを備え、プロセッサが、相が電流パルスで供給される間に時間重複しない第1モードと、2つのコイルへ供給される出力が33%だけオーバーラップする第2モードとにおいて速度を制御するために可変のデューティレシオで位相を進め、かつ、該レシオが70%から100%の範囲の所定の値に達するときに第1から第2モードへ切換を生じさせ、かつ、前記レシオが他の所定値以下に落ちたときには第2から第1モードへ切換を生じさせるように設計されたことを特徴とする。
(もっと読む)
電子パワーモジュール及びその製造方法

【課題】放熱回路の熱抵抗を低減して放熱パワーの急峻なピークに適応する構造体を提供する。
【解決手段】本モジュールは、アルミニウム系金属基板10と、絶縁層15を介して前記基板10に取り付けられて等電位接続を構成する少なくとも1つの銅系材料棒12とを含む。パワー素子16が、絶縁層15の面積よりも小さい面積の表面を介して棒と直接接触する。プリント回路カード18が単数又は複数の棒に当該棒から突き出して取り付けられ、当該プリント回路カード18は、本モジュールの、放熱が少ない素子を担持する。
(もっと読む)
位置センサを有する線形電磁アクチュエータ
【課題】電機子の静止位置を正確に決定する。
【解決手段】強磁性回路の極に当接する電機子の2つの極限位置の間でロッドを軸方向に駆動する強磁性材料の電機子22に対して軸方向の移動間隔を画定する強磁性回路と、当該極限位置の間の中間位置にバルブを静止させて保持するべく設けられた弾性戻り手段28a、28bと、当該回路に支持されて当該電機子を当該位置の双方に交互に動かし得る少なくとも1つのコイルとをハウジング内に有する電磁アクチュエータである。ロッドは、電機子の移動距離以上の長さを有して径方向に磁化された棒を支持する。ハウジングは、単数又は複数のコイルによって生じる磁界に弱くさらされる領域に配置された少なくとも1つの磁束センサを支持する。
(もっと読む)
バルブ制御のための調整可能装置及び調整方法
【課題】バルブと同数のアクチュエータを含み軸方向に直線変位するバルブ制御装置に関し、調整手段がコンパクトであって、当該装置をエンジンのシリンダヘッドに取り付けた場合に極めて短時間で調整を行なえるバルブ制御装置を提供する。
【解決手段】各アクチュエータは、バルブプッシュロッド24に固定された強磁性電機子22と、一端がロッド24を支承し他端が固定アンカ手段を支承する少なくとも1つの戻りばね28aとを有し、当該アクチュエータのケースに関する位置を調整可能である。2つの隣接するバルブ25のアクチュエータ間に通路が設けられて、調整器具の通過が可能となる。
(もっと読む)
内燃エンジンに結合された電気機械のローターの電気的位置を検出する方法および装置
【課題】ゼロ速度からエンジンの始動の全作動範囲に渡って電気機械のローターの角位置を精度よく測る手法を提供する。
【解決手段】最低速度測定値(VM)よりも大きい速度に対する第1角位置信号を配信するセンサ(8)を備えた内燃エンジン(7)に結合(6)された電気機械のローター(4)の電気的位置を検出するために、電気機械の特性に基づき、推定速度(VA)よりも小さい速度でのローターの推定角位置を表わす第2信号を発生する工程と、推定回転速度に基づいて、電気機械を制御する手段に、推定速度が第1閾値(S1)を下回る時の角位置の推定値、あるいは推定速度が第2閾値(S2)を上回る時のセンサからの信号のいずれかが供給される工程と、第1閾値と第2閾値間の範囲で一方の信号から他方の信号に切り換えが行われる工程を含む。
(もっと読む)
内燃機関の排気ガス再循環システム用コントロールバルブ
【課題】EGR弁リフト制御作動部の耐摩耗性を高めるとともに、簡易な構造としてコスト低減を図る。
【解決手段】EGRガス通路の管路内に配置された止め弁3と、回転作動手段1と、前記止め弁をその閉鎖位置から開放位置に、またその逆に、前記回転作動手段により止め弁を駆動するカム11とを含む。このバルブは、回転作動手段の出力軸2に相対回転不能に結合するスイングバー9と、止め弁に相対並進移動不能に結合され、かつ前記スイングバーに相対回転不能に結合される横軸12と、前記横軸の端が係合する固定ガイド螺旋溝11とを含む。
(もっと読む)
気体媒体の酸素含有量を測定するための装置
【課題】内燃機関に入れられる空気/燃料比を、排気ガスの組成に基づいて、より特定的には排気ガス中の残留酸素の分圧に基づいて定めることにある。
【解決手段】基準酸素圧力とセンサの体積内の酸素圧力との比を表わす代表電圧を伝える能力を有し、かつ体積内の前記酸素圧力を制御するポンピング電流がその中を通過することが可能である電極12、14を備えたセンサと、入力に前記代表電圧を受けポンピング電流を伝えるのに適したデジタルコントロール26を含む監視および制御手段とを含む。監視および制御手段は、中断することなく連続的かつ累進的に変動する電流の形であるポンピング電流を伝え、入力電圧を定められた値にサーボ制御する態様でデジタルコントローラによって支配される。
(もっと読む)
1 - 7 / 7
[ Back to top ]