
株式会社ケーイーアールにより出願された特許
1 - 2 / 2
平行二輪ビークル、その安定姿勢保持機構ならびに走行制御方法および荷台部姿勢制御方法
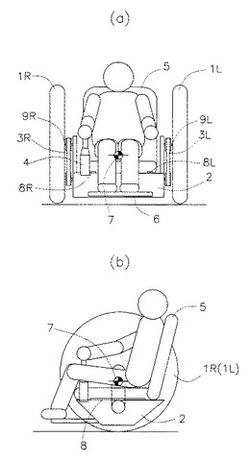
【課題】 駆動力の供給ができない状況においても車両全体の姿勢を安定させるとともに、操作部に基づく走行を可能にする平行二輪ビークル、その安定姿勢保持機構ならびに走行制御および荷台部姿勢制御の方法を提供する。
【解決手段】 平行に配置された二つの車輪1L,1Rを有する平行二輪ビークルにおいて、車輪の回転中心よりも低位置に荷台部5を備え、車輪の径を十分に大きくするとともに、荷台部は、荷台部に搭乗する搭乗者を含めた車両全体の重心7が車輪の回転中心9L,9Rよりも低位となる位置に設ける。荷台部は、車輪の進行方向に進退可能なウエイトを備え、この荷台部に車輪を駆動する駆動装置を設ける。車両全体の重心が車輪の回転中心から鉛直方向に位置するように荷台部の状態を制御する。
(もっと読む)
力覚提示型ジョイスティックならびに全方向移動対象物の操作制御装置および制御方法

【課題】 回転方向を含む複数方向について操作制限を可能にする力覚提示型のジョイスティックを提供するとともに、全方向移動対象物の操作について回転方向を含む方向に対する操作制限を可能にする操作制御装置および操作制御方法を提供する。
【解決手段】 ジョイスティックは、傾動および軸回りの回動が可能な操作レバーを支持する支持軸を備え、操作レバーおよび支持軸の角速度および回転角度を検出する検出手段と、操作レバーおよび支持軸に駆動力を付与するモータをそれぞれ設け、検出手段による検出値と所望数値との比較に基づいてモータを制御する制御手段を備える。全方向移動対象物の制御装置は、移動対象物の適宜位置に外部センサと、演算装置とを備える。制御方法は、全方向移動対象物に設けた外部センサにより障害物との距離および角度を検出し、インピーダンス制御によりモータの駆動力を制御する。
(もっと読む)
1 - 2 / 2
[ Back to top ]