
ホンダ リサーチ インスティテュート ヨーロッパ ゲーエムベーハーにより出願された特許
1 - 10 / 50
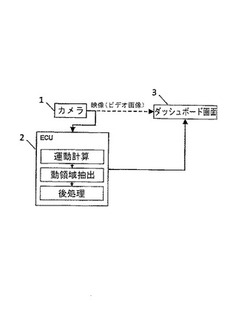
映像に基づく車両用警報システム
【課題】
任意の車両に搭載可能な警報システムにおいて、移動物体を効率的に検出する。
【解決手段】
本システムは、車両の周囲を連続的に撮影する少なくとも一つのカメラを有している。これにより、移動物体を監視する。また、カメラ画像におけるピクセルモーションに基づいて、任意の移動物体の運動を計算するようプログラムされたコンピュータユニットを備える。さらに、危険な移動物体が検出されたときに警報信号を発するための警報ユニットを備える。この判断を行うために、少なくとも一つの移動物体についての前記計算した運動と、予め定められた運動パターンとの関連性の調査又は比較を行う。
(もっと読む)
路面分析

【課題】車両が走行しようとする路面を分析し、車両の安全性および制御を向上させる。
【解決手段】システム10は、シリコン網膜11のようなAERカメラを用いる。このシリコン網膜11を用いて、走行しようとする路面をモニタリングする。そして、処理ユニット12が、そのシリコン網膜によって提供された信号に基づいて、路面を分析する。路面分析方法は、上記のシステム10によって実行され、従来の分析方法を凌駕するものである。
(もっと読む)
ドライバ支援システムのための、道路地形を検出する方法及びシステム
【課題】
本発明は、カメラ画像等の知覚入力に基づいて、車両の環境内における選択された位置を分類する方法を実行する道路地形検出システムについて記載する。
【解決手段】
本方法では、上記環境における、ベースポイントと称する選択された位置についての、高水準の空間特徴生成を行う。このベースポイントについての空間特徴生成は、環境の視覚的及び物理的特徴物を捉えた価値連続な信頼度表現に基づいて行われる。この信頼度表現は、生の知覚データを処理するいわゆる基本分類器により生成される。これにより、本道路地形検出では、センサデータから把握される局所的特徴物と、2段階の特徴抽出処理を経て取得されるこれら局所的特徴物の間の関連性とを組み込むことができる。
(もっと読む)
交通物体の動きを予測する方法及び装置
【課題】車両等の対象物体の将来の振る舞いを予測する方法を提案する。
【解決手段】環境内の対象物体を検知してセンサデータを生成するステップと、センサデータから抽出された間接指標を用いるコンテキストベース予測により、検知した対象物体の振る舞いを予測して、当該振る舞いの複数の選択肢を計算するステップであって、前記コンテキストベース予測は、特徴ベクトルを算出して前記各選択肢の発生確率を算出する分類器の集合を用いる、ステップと、測定された位置と状況モデルの軌跡とを比較して、前記可能な振る舞いの選択肢の集合のサブセットである少なくとも一つの可能な振る舞いを示す軌跡を決定する物理的予測を行い、前記振る舞いの選択肢を検証するステップと、前記少なくとも一つの軌跡に基づいて、前記対象物体の将来における位置を算出するステップと、前記算出した将来における位置を表わす信号を出力するステップと、を備える。
(もっと読む)
対応点探索のための画像処理方法
【課題】
対応点探索において、NCCフィルタリングに関するジレンマを解決する。
【解決手段】
画像パッチ間の類似性を比較する方法であって、それぞれが少なくとも一つの画像パッチを供給する少なくとも2つの画像供給源から、少なくとも2つの画像パッチを受信するステップと、受信された画像パッチを比較するステップと、を有し、前記比較するステップは、各画像パッチから複数の対応関係にある部分画像ペアを抽出するステップと、すべての前記部分画像ペアの間で正規化局所類似度スコアを算出するステップと、すべての前記部分画像ペアの局所類似度スコアの総和を計算して総マッチングスコアを算出するステップと、総マッチングスコアを画像パッチの類似度指標として用いて、総マッチングスコアに基づき、対応関係を持つ類似画像パッチを決定するステップとを有する。
(もっと読む)
運転者支援システムのための実世界の交通場面からの視覚特性の行動ベース学習
【課題】運転者支援システムをセットアップおよび運用するための、コンピュータに実装される方法を提供する。
【解決手段】車両の環境を視覚感知するステップと、車両のマン・マシン・インタフェースを操作している運転者の影響を受ける可能性がある、車両の状態を表すパラメータの少なくとも1つの変化率を感知するステップと、感知された変化率の特定のカテゴリに関連付けられ、したがって、運転者の特定行動に関連付けられた視覚的特徴を見つけるために、視覚感知によって収集された情報を、少なくとも1つの感知された変化率をその様々なカテゴリに分類することによって構造化するステップと、を含む。
(もっと読む)
追跡モデル化レベルの知識ベースの自律的適応を用いた多物体追跡
【課題】物体構成追跡モデルの性能を向上させる。
【解決手段】感覚入力データに基づく物体および物体構成の追跡のための方法であって、(1.1)基本補充:すでに追跡された物体によってまだカバーされていない感覚入力データ中の関心対象部分を検出し、これらの部分の状態を連続的に推定するためにこれらの部分の基本追跡モデルを増分的に初期設定するステップと、(1.2)追跡モデル複雑さ調整:実行時に、被追跡物体に対して、より複雑な予測モデルおよび、または測定モデルと、より単純な予測モデルおよび、または測定モデルをテストするステップと、(1.3)基本解除:トラッカの予測および測定のプロセスがある時間にわたって十分な感覚的裏付けを得られない感覚データの部分からトラッカを解除するステップとを含む。
(もっと読む)
自動車、オートバイ、または航空車両等の工業デザインのためのCADベースのスタイリングプロセスにおける機能的CAEデータの統合のための方法およびシステム
【課題】実世界対象物についての美観および機能設計プロセスを統合するためのコンピュータ支援システムを提供する。
【解決手段】システムは、a)対象物の美的表現を定義するモジュール、b)CAEシミュレーションモジュールの近似モデルデータの供給を受け、美的表現のパラメータ記述を入力として用いて機能的品質値を計算するモジュール、c)品質値をユーザに伝える物理信号を発行するインターフェース、d)得られた品質値を考慮して、美観設計プロセスで対象物の美的表現のパラメータ記述を変更するモジュールを備える。尚、c’)デザインの一組の変化についての品質値感度分析を実行する為、美的表現のパラメータ記述を変更し、該デザイン変化について、近似モデルを使用して品質値を抽出するモジュール、d’)デザインの美的表現のパラメータ記述の異なる変更の品質値の感度をユーザに伝える物理信号を発行するインターフェースを備えてもよい。
(もっと読む)
視覚に基づく3次元形状認識を備えたロボット
【課題】2次元(2D)の視覚信号から、対象物の3次元(3D)形状を認識する。
【解決手段】ビデオ信号において表される対象物について、3D形状の情報を抽出するため、ビデオセンサからの該ビデオ信号を処理するための方法であって、対象物が、3D形状空間において格納されるメモリを提供するステップであって、該形状空間は、該対象物の3D形状の特性をコード化する抽象特徴空間である、ステップと、対象物の2Dのビデオ信号の表現を、前記形状空間にマッピングするステップであって、該形状空間における対象物の座標は、該対象物の3D形状および(または)物理的特性を示す、ステップと、を含む。
(もっと読む)
動的注意モジュールを備えた運転者支援システムまたはロボット
【課題】視覚に基づく注意システムに関し、自車両の周辺環境をモニタし、運転者を支援(アシスト)する。
【解決手段】少なくとも1つの視覚センサと、少なくとも1つの2次元特徴マップを生成するよう、前記視覚センサの出力信号を処理する少なくとも1つの画像処理モジュールと、前記少なくとも1つの特徴マップに基づいて、第1の顕著性マップを生成する背側注意サブシステムであって、該顕著性マップは、運転者支援システムの注意の焦点を示す、システムと、背側注意サブシステムとは独立し、前記少なくとも1つの特徴マップに基づいて、第2の顕著性マップを生成する腹側注意サブシステムであって、該特徴マップは、背側注意サブシステムにおいて用いられるものと同じでも異なってもよい、システムと、を備える。該第2の顕著性マップは、予期しない視覚刺激を示す。
(もっと読む)
1 - 10 / 50
[ Back to top ]