
トプコン ポジショニング システムズ, インク.により出願された特許
1 - 10 / 11
道路表面の品質評価のための仮想プロフィログラフ
【課題】より効率的で時宜にかなった、道路の乗り心地測定方法を提供すること。
【解決手段】道路を建設しながら道路の乗り心地を示す測定結果を提供することができる仮想プロフィログラフが開示されている。結果として従来方法に比較してより時宜にかなった低コストである、道路の乗り心地の指標が得られた。第1の実施形態では全地球的航法衛星システムのアンテナが車両に取り付けられている。車両が道路上を進んでいるとき、アンテナ位置の測定値が別々の時間に記録される。道路のプロファイルは、出発位置から進んできた距離の関数としてアンテナの高さを測定することによって創り出される。他の実施形態では、道路の傾斜及び車両の傾きを測定するのに傾きセンサが使用され、それによって車両の精密な向き、したがって道路の輪郭を決定することができる。
(もっと読む)
マルチパス低減用半透明平面グランドプレーン

アンテナによるマルチパスの受信は、中央領域および周辺領域上の積層インピーダンスの制御された分布を有する半透明のグランドプレーン上にアンテナを取り付けることによって低減する。中央領域は、アンテナの接地要素が配置されている連続的な導電セグメントを含む。周辺領域にわたる積層インピーダンスの分布は、集中定数回路素子によって電磁結合された、複数の導電セグメントで構成されている。半透明のグランドプレーンは、導電セグメントの所望のパターンを形成するために、誘電体基板上に金属膜を堆積し、金属膜に溝をエッチングすることによって作製できる。集中定数回路素子は、個別のデバイス、表面実装デバイス、集積回路デバイスとして作製できる。様々な半透明のグランドプレーンは、直線偏光放射および円偏光放射用に構成可能である。 (もっと読む)
作業車両または農業用車両における器具の定位のためのシステムおよび方法
車両上の器具の定位を決定するためのシステムが提供される。本システムは、車両に取り付けられたカメラと、器具に取り付けられた、カメラの視野内の対象物を含む。対象物は、カメラに対して器具の定位の決定を可能にするマーキングを含む。車両上で器具の定位を決定する方法が提供される。器具定位システムが提供される。器具定位システムを設置する方法が提供される。コンピュータで実行可能な命令を内部に記憶したコンピュータ可読媒体が提供される。コンピュータで実行可能な命令は、実行時に器具の定位を決定する方法をプロセッサに実行させる。 (もっと読む)
全地球的航法衛星システム受信機における異常測定値の検出および補正ならびにアンビギュイティの決定
全地球的航法システムはローバ内に配置された第1のナビゲーション受信機と、基地局内に配置された第2のナビゲーション受信機とを備える。2つの受信機において受信された衛星信号の測定値の一重位相差が算出され、観測モデルから導き出された一重位相差と比較される。ローバの出力位置を判定し、かつ、整数値アンビギュイティを決定するための計算に先立って、異常測定値が検出され、除去される。検出基準は算出されかつ導き出された一重位相差間の残余に基づく。整数値アンビギュイティを決定するために、コレスキー情報カルマンフィルタおよびハウスホルダー変換に基づいて行われる計算が好適に適用される。1つのエポックから別のエポックへの衛星の配座状態の変化が計算の中に含まれる。 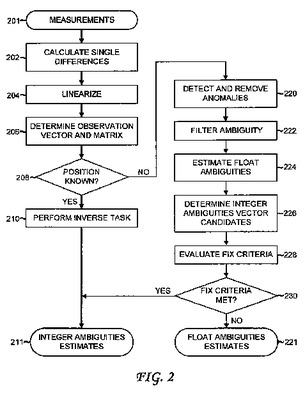 (もっと読む)
(もっと読む)
統合ナビゲーションレシーバを備えたコンパクトマルチパス耐性アンテナシステム
改良されたマルチパス耐性をもつパッチアンテナシステムは、上部アンテナアセンブリと、下部アンテナアセンブリを含む。各アンテナアセンブリは、誘電媒体で分離されたラジエターパッチ及びグランドプレーンを含む。上部アンテナアセンブリのラジエターパッチは、励磁機と励磁回路によって励磁される。下部アンテナアセンブリは、上部アンテナアセンブリに電磁結合している。下部アンテナアセンブリの共振周波数は、上部アンテナアセンブリの共振周波数にほぼ等しい。下部アンテナアセンブリに誘導される電磁界は、上部アンテナアセンブリで励磁される電磁界に対して逆位相である。下部アンテナアセンブリに誘導される電磁界の振幅は、上部アンテナアセンブリで励磁される電磁界の振幅から減算され、マルチパス信号が抑制される。グローバルナビゲーション衛星システムに適したシングルバンド及びデュアルバンドアンテナシステムを実装することができる。 (もっと読む)
地ならし機の動的安定化および制御
【課題】制御システムを含む地ならし機を提供すること。
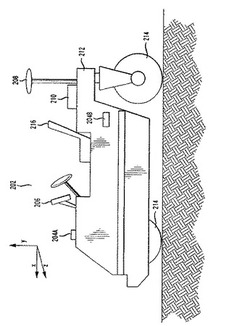
【解決手段】機械は、地ならし機上で長手方向に取り付けられた第1および第2の衛星アンテナを備える。第3の衛星ナビゲーション・アンテナが、地ならし機の動作要素に取り付けられた柱に取り付けられている。一実施形態では、地ならし機はブルドーザであり、動作要素はブルドーザの刃である。機械はさらに、重力基準センサと、機械に取り付けられた複数のジャイロスコープとを備える。コンピュータ・プロセッサは、様々な構成部品から受信したセンサ・データに基づき制御信号を発生させる。開示されたシステムおよび方法により、望まない振動を発展させることなく、比較的速い速度で地ならし機の動的安定動作が可能になる。
(もっと読む)
統合された全地球的航法衛星システム・センサおよび慣性センサを有する自動ブレード制御システム
ブルドーザ・ブレードのブレード上昇およびブレード傾斜角を制御するための方法および装置が開示される。上昇測定値およびスロープ角測定値は、ブルドーザ・ブレード上に設置された全地球的航法衛星システム(GNSS)アンテナおよび慣性測定ユニットから受信された測定値から算出される。慣性測定ユニットは、3つの直交方向に配置された加速度計および3つの直交方向に配置されたレート・ジャイロを含む。これらの測定値は、ブレード上昇、ブレード垂直方向速度、ブレード傾斜角、およびブレード傾斜角速度の推定値を算出するためのアルゴリズムによって、処理される。次いで、これらの推定値は、ブレード上昇およびブレード傾斜角を制御するブルドーザ油圧システムを制御するための制御信号を供給する制御アルゴリズムへの入力として、供給される。 (もっと読む)
衛星/レーザ測位システムにおいて高さ座標を正確に決定するための方法および装置
【課題】受信した衛星信号および受信したレーザ信号から位置座標を生成することが可能な衛星/レーザ測位システムにおいて信号を処理するための方法および装置を提供すること。
【解決手段】レーザ信号が利用可能である期間中は、高さ座標バイアス値がフィルタ・プロセッサによって維持される。高さ座標バイアス値は、衛星信号から導出された高さ座標とレーザ信号から導出された高さ座標との間の推定差を表す。レーザ信号が利用可能である期間中は、レーザ信号から導出された高さ座標が出力される。レーザ信号が利用できない期間中は、高さ座標バイアス値を衛星信号から導出された高さ座標に加えることによって、補正された高さ座標値が生成される。
(もっと読む)
三次元地形マッピング
【課題】地理的区域の三次元地形マップを生成する技術を提供する。
【解決手段】移動ユニットは、位置データを生成する衛星受信機(例えば、GPS受信機302)を装備する。マップ・ジェネレータ(404)は位置データ(402)を用いて、三次元地形マップ(406)を生成する。一実施形態では、移動ユニットはマッピング以外の一次的用途を有し、その一次的機能に関連してマップされることになる地理的区域を移動する。追加的な位置データが利用可能になると、マップ生成処理は経時的に反復して実行されてよい。位置データが三次元地形マップの一部分に関して利用できない期間、マップ・ジェネレータは利用可能なデータを用いてマップの不足部分を推定してもよい。推定された部分は後に、データ利用できるようになると、実際のデータで更新されてもよい。マップはマップ・ジェネレータによって受信された拡張データに基づく拡張を含んでもよい。
(もっと読む)
道路表面の品質評価のための仮想プロフィログラフ
【課題】より効率的で時宜にかなった、道路の乗り心地測定方法を提供すること。
【解決手段】道路を建設しながら道路の乗り心地を示す測定結果を提供することができる仮想プロフィログラフが開示されている。結果として従来方法に比較してより時宜にかなった低コストである、道路の乗り心地の指標が得られた。第1の実施形態では全地球的航法衛星システムのアンテナが車両に取り付けられている。車両が道路上を進んでいるとき、アンテナ位置の測定値が別々の時間に記録される。道路のプロファイルは、出発位置から進んできた距離の関数としてアンテナの高さを測定することによって創り出される。他の実施形態では、道路の傾斜および車両の傾きを測定するのに傾きセンサが使用され、それによって車両の精密な向き、したがって道路の輪郭を決定することができる。
(もっと読む)
1 - 10 / 11
[ Back to top ]