
インターナショナル インダストリー サポート、インクにより出願された特許
1 - 1 / 1
立体カメラセットを有する走査システム
走査システムは、対象物(40)の定性的及び定量的不規則性を検出する1以上の立体カメラ(10)を有する。各立体カメラセット(10)は、2つのカメラ(12,14)と投影器(16)とを有する、各カメラ(12,14)は、CCDマトリックス配列(18)の配列不良による歪みと光学システムの欠損とを補正するために較正される。投影器(16)は、測定されるべき対象物(40)に絶対符号パターン(32,34,36)を投影し、赤外、可視、紫外スペクトルの電磁気エネルギーを放射可能である。複数のカメラセット(10)は、3次元空間(26)の対象物(40)の不規則性を検出可能な走査システムマトリックス(42,44)と結合され得る。3次元空間(26)は、立体カメラセット(10)の数に応じて、任意の所望の寸法であり得る。カメラ(12,14)からのデータは、測定の表示用にデジタル信号プロセッサ(66)を介してコンピュータインターフェース(64)に送信される前に、ゲートアレイ(62)により予備処理される。結果的に、送信されるデータ量は、簡素化され、従って動作時間を減少させ、走査システムが非常に短い時間で対象物(40)の不規則性を非常に正確に測定することを可能にする。 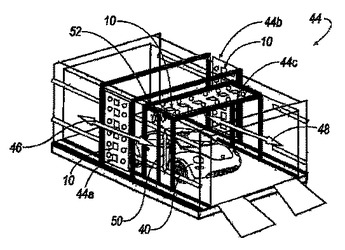 (もっと読む)
(もっと読む)
1 - 1 / 1
[ Back to top ]