
ベックホフ オートメーション ゲーエムベーハーにより出願された特許
1 - 10 / 22
リアルタイム・ランタイムシステムおよびそのようなランタイムシステムのための機能モジュール

【課題】より柔軟性があり拡張が容易なランタイムシステムを実現する。
【解決手段】リアルタイム・ランタイムシステムは、複数の機能モジュールおよび1つの管理モジュールを備えている。複数の機能モジュールは、初期化状態から前動作状態までの遷移状態において割り当てられたモジュール識別子を用いて管理モジュールにログオンし、前動作状態から初期化状態まで遷移状態においてログオフするように構成されている。複数の機能モジュールのうち少なくとも1つは、前動作状態から試動作状態までの遷移状態において管理モジュールを介して他の機能モジュールとの通信接続を確立し、試動作状態から前動作状態までの遷移状態において通信接続を切断し、試動作状態からリアルタイム動作状態までの遷移状態において上記他の機能モジュールにログオンし、リアルタイム動作状態から試動作状態までの遷移状態においてログオフするように構成されている。
(もっと読む)
並列プログラム制御
本発明は、各々が時刻信号の生成器に対応付けられた、並列に動作する複数の処理ユニットにてプログラムを実行するための制御方法に関わり、当該制御方法は、時刻信号の生成器の満了時に、割り当てられた処理ユニットにて実行され、処理ユニットにて実行可能なプログラムを選択するステップと、満了時刻信号の生成器に所定の持続時間を設定するステップと、処理ユニットにて選択されたプログラムを開始するステップとを含むことを特徴とする。  (もっと読む)
(もっと読む)
電子モジュール形態の無停電電源装置のための回路および方法
負荷に対して無停電電源を提供するために、エネルギー供給部(2)に接続された容量性エネルギー蓄積器(52)を充電する。この容量性エネルギー蓄積器の電圧を評価することによって、容量性エネルギー蓄積器の充電を監視し、エラーが検出されると充電を中止する。上記エネルギー供給部を介して印加された電圧に第1の所定の電圧降下が発生すると、容量性エネルギー蓄積器を放電させることによって、上記負荷に供給するために必要なエネルギーを供給する。また、上記エネルギー供給部を介して印加された電圧に第1の所定の電圧降下を超える第2の所定の電圧降下が発生すると、上記エネルギー供給部を介する負荷へのエネルギー供給が、容量性エネルギー蓄積器からの負荷へのエネルギー供給に切り替えられる。  (もっと読む)
(もっと読む)
同期モータを作動させる方法および増幅器
本発明は、同期モータ(100、300)を作動させる方法に関する。本方法では、ステップa)において、第1のモータ部材(110、310)によって磁場(111、311)を所定の向きに生成して、第1のモータ部材と第2のモータ部材(110、120、310、320)との間で所定値(151)に限定された相対運動を発生させ、ステップb)において、この第1のモータ部材と第2のモータ部材(110、120、310、320)との間の限定された相対運動の運動方向を決定する。第1のモータ部材と第2のモータ部材(110、120、310、320)との間の限定された相対運動の運動方向に変化が発生するまで、ステップa)およびステップb)を繰り返し、ステップa)が行われるごとに、先に生成された上記磁場(111、311)に対して変化した向きを有する磁場(111、311)を第1のモータ部材(110、310)によって生成し、ここで、磁場(111、311)の向きを、それぞれ所定の配向セクション(170)によって、および、上記の決定された運動方向に応じて変化させる。本発明は、さらに、同期モータ(100、300)を作動させるための増幅器(200)、および、増幅器(200)と同期モータ(100、300)とを備えたシステムにも関する。 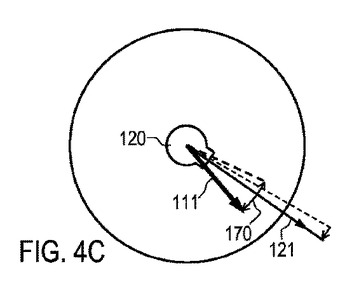 (もっと読む)
(もっと読む)
安全ステップの判定方法および安全マネージャ
サブスクライバを含むオートメーションネットワークにおける安全ステップを判定するために、オートメーションネットワークにおけるサブスクライバ間のデータおよび処理に固有のリンクは、自動的に判定される。オートメーションネットワークにおける安全ステップは、その後、オートメーションネットワークにおけるサブスクライバの判定されたデータおよび処理に固有のリンクと、判定されたサブスクライバに固有の安全パラメータとを関連付けるアルゴリズムを用いて評価される。 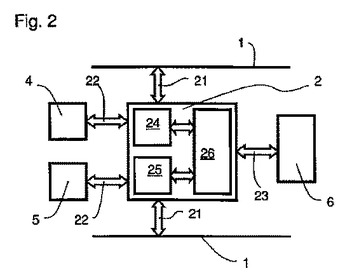 (もっと読む)
(もっと読む)
リモートコントロール方法
各対象物をコントロールするために方法では、コントロールされる各対象物が実空間内に配置される。上記実空間は、変換ルールにより複数次元の表現空間にリンクされる。表現空間内の各表現型が、上記実空間のコントロール可能な各対象物に対してマッピングによって関連付けられる。上記方法は、上記実空間内のポインタの位置および方向を決定するステップと、上記ポインタに関連付けられるポインタ表現型の位置および方向を、上記実空間内の上記ポインタの位置および方向、並びに、上記実空間および上記表現空間の間の変換ルールを用いて決定するステップと、上記ポインタ表現型により横切られた、上記表現空間内の上記各表現型を決定するステップと、上記ポインタ表現型により横切られた表現型を選択するステップと、上記表現空間内の上記ポインタ表現型に関連付けられた、上記実空間内の上記対象物をコントロールするステップとを有する。  (もっと読む)
(もっと読む)
セーフティコントロールを作動させる作動方法、および、そのようなセーフティコントロールを備えたオートメーションネットワーク
本発明は、セーフティコントロールを作動させる方法、および、そのようなセーフティコントロールを含むオートメーションネットワークに関する。本発明では、セーフティコントロールを実装しているマスターサブスクライバを含むオートメーションネットワーク内の上記セーフティコントロールを作動させるために、上記セーフティコントロールに識別子を割り当てる。上記マスターサブスクライバは、安全マスターサブスクライバ内に格納されている上記識別子が上記セーフティコントロールから計算される上記識別子と一致するかを、上記セーフティコントロールをロードするときに確認する。上記識別子が異なると判定された場合に、上記オートメーションネットワークは、安全状態に移行する。  (もっと読む)
(もっと読む)
複数の制御ノードから構成されるネットワーク用の制御ノード
複数の制御ノードから構成されるネットワーク(3)用の制御ノード(1)は、送信モジュール(12)を有している。送信モジュール(12)は、送信するデータを、出力プロセスイメージ内で管理し、上記出力プロセスイメージをデータパケットに変換し、上記データパケットを所定の時点でネットワーク上に出力するように構成されている。制御ノード(1)は、受信モジュール(13)をさらに備えている。受信モジュール(13)は、他の制御ノードの1つまたは複数の送信モジュールからのデータパケットにログインし、受信したデータパケットを入力プロセスイメージに変換するように構成されている。  (もっと読む)
(もっと読む)
制御ノードのネットワークのためのプログラミング装置、及びそれを有するシステム
制御ノード(1)のネットワークにおいて、上記ネットワークに接続される制御ノードを決定する記録モジュール(27)と、上記記録モジュールに接続され、上記ネットワークの制御ノード構成を表すシステムオブジェクトモデルを含み、該システムオブジェクトモデルに基づいて記録された制御ノード間の通信の関係を示すように構成されるシステムオブジェクトモジュール(26)と、上記システムオブジェクトモジュールに接続され、上記システムオブジェクトモジュールにより決定された上記ネットワーク内の制御ノード間の通信の関係を上記制御ノードに送信する構成出力モジュール(28)を備えるプログラミング装置(2)を提供する。  (もっと読む)
(もっと読む)
制御ノードおよび制御部
本発明は、シーケンス表およびサブスクライバを有する制御ノードに関する。上記シーケンス表は、上記制御ノードに関連した製造シーケンスの各動作用の識別子と、上記動作を実行するサブスクライバ用の識別子と、上記動作に関連するパラメータセットの識別子とを備えるデータレコードを有しており、各上記サブスクライバは、シーケンスインタープリタを有し、上記シーケンスインタープリタは、上記シーケンス表を読み取ると共に解釈して、当該サブスクライバに関連する動作を開始するように設計されている。  (もっと読む)
(もっと読む)
1 - 10 / 22
[ Back to top ]