
インサイチュー インコーポレイテッドにより出願された特許
1 - 5 / 5
無人航空機を回収し、回収後の動作を制御するためのシステムおよび方法
無人航空機を回収し、この航空機の回収後の動作を制御するためのシステムおよび方法が本明細書で開示されている。本開示の一実施形態による、無人航空機を取り扱うための航空機回収システムは、基部(102)と、この基部に可動に結合されている(106)第1の端部およびこの第1の端部の反対側の第2の自由端部を有する細長い航空機捕獲部材(104)とを含む。この航空機捕獲部材は、第1の部分(110)と、この第1の部分の末端部に飛行中の無人航空機を捕らえるように配置されている第2の部分(112)とを含む。この第1の部分および/または第2の部分は、概ね可撓である。このシステムは、航空機捕獲部材に機能的に結合されていて航空機からの着陸する力の少なくとも一部を受け取るように配置されているエネルギー捕獲および散逸アセンブリ(108)をさらに含む。  (もっと読む)
(もっと読む)
無人機の無線制御および関連する偵察データへのアクセス
無人機(UAV)を制御することは、無線デバイス(例えば、携帯電話)を使用し、無線通信ネットワーク(例えば、もっぱら携帯電話通信用に構成されている既存携帯電話ネットワーク)を介して制御メッセージをUAVの受信機に送信することにより実行されうる。それに加えて、無線デバイスは、前記UAVの送信機からの通信を受け取るために使用され、また無線デバイスは、無線ネットワークを介して送信機から通信を受け取る。このような通信の実施例は、偵察情報およびUAV監視情報を含む。  (もっと読む)
(もっと読む)
プロペラの角度を制御するための方法およびシステム
プロペラ羽根の運動を制御するための装置および方法が、開示されている。一つの実施例においては、その装置は、第1の軸で第1の軸線回りにプロペラを回転させる第1のモータを含み得る。その第1のモータに対して固定される第1の信号伝送部は、第1の軸で回転する第2の信号伝送部に信号を伝送できる。第2のモータは、第1の軸により担持され、その第2の信号伝送部からの信号を受信できる。その第2のモータは、羽根の角度を変更するように第1の軸線に対し略直角な第2の軸線の回りにそのプロペラ羽根を第2の軸を介して駆動できる。  (もっと読む)
(もっと読む)
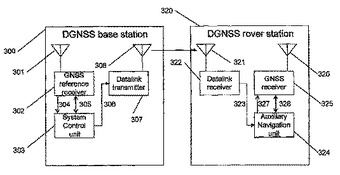
移動プラットフォームの衛星ベースの相対測位のための方法および装置
本発明は、衛星ベースのナビゲーション技法および移動するプラットフォームに設置された設備を用いた、移動するプラットフォーム間の相対的位置の決定を対象とする。本発明は、観測スペースおよびナビゲーションスペースのディファレンシャルシステムのコンセプトを組み合わせ、データリンクローディングおよび付加的プロセッサの計算負荷を最小化する際に特定のGNSS受信機のビルトインディファレンシャル測位およびナビゲーション能力に依拠するために、DGNSS基準局を時変モードで動作させる。本発明は、参照局モードで動作中にそれは静止していると仮定するDGNSS設備を用いて、移動している基準局に関して正確な相対測位およびナビゲーションを達成する。
 (もっと読む)
(もっと読む)
プロペラで駆動される装置を始動する方法とシステム
プロペラで駆動される飛行機等の装置を始動させる方法とシステム。本発明の一実施形態にかかるシステムは、プロペラ(120)に連結され、流れに曝されてエンジンの始動時にプロペラを回転させる少なくとも一つの部分(131a)を有する取り外し可能な固定具(130)を具えている。この固定具はエンジン(110)が回転を始めた後(例えば、エンジンが始動し、及び/又は所定の速度以上で回転した後に)、プロペラから分離する。即ち、このシステムは、固定具とプロペラとの間に解放可能なリンク(132)を具えている。
S  (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]