
キャタピラー トリンブル コントロール テクノロジーズ、 エルエルシーにより出願された特許
1 - 5 / 5
掘削機の3D集積レーザおよび無線測位誘導システム
掘削機の3D集積レーザおよび無線測位誘導システム(Ex_3D_ILRPGS)は、掘削機(14)の2D水平座標を得るよう構成された移動無線測位システム受信機(12);掘削機のブーム(36)、スティック(38)およびバケット(40)の座標を得るよう構成されたバケット−機械本体測位システム(16);少なくとも1本のレーザビーム(26)を受信するよう構成され、実質的に高い精度で局所的な垂直座標を与えるよう構成されたレーザ検出器(24);移動無線測位システム受信機によって得られた掘削機の2D水平座標と、バケット−機械本体測位システムによって得られた掘削機のブーム、スティックおよびバケットの座標と、レーザ検出器によって得られた局所的な垂直座標とを受信して統合するよう構成され、実質的に高い垂直精度で掘削機のバケットの切刃を誘導するよう構成されたオンボードナビゲーションシステム(28)を含む。 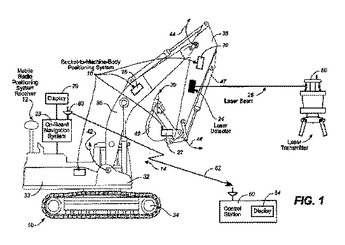 (もっと読む)
(もっと読む)
慣性航法システムを増補するシステムおよび方法

【課題】より高い頻度で、GPS信号またはレーザ信号の一方または両方がブロックされる可能性がある期間中に、正確な位置情報およびエレベーション情報を生成できる位置監視システムを提供すること。
【解決手段】慣性航法システム(INS)を増補するシステムおよび方法は、作業機に関連する位置情報をINSから出力することと、作業機の位置情報と作業機の所望の位置との比較に基づいて作業機を調整することとを含む。INSは、INSの固有の特性によって引き起こされる可能性がある位置情報のドリフトを訂正するために、ファンレーザ、オートマティックトータルステーション(ATS)、GNSS受信器、または地上ベース無線位置決めシステムなどの1つまたは複数の位置決め(または測定)デバイスからの位置情報の関数としてカルマンフィルタによって生成される誤差推定値を使用して、周期的に再初期化される。
(もっと読む)
土工システムのための制御装置及び制御方法

【解決手段】土工システム(100)は、一実施形態において、レーザ光の基準ビーム(104)を送信するレーザ送信機(102)と、ブルドーザーブレード上のマスト(128)に搭載されたレーザ受信機(126)を有している。ブルドーザー(106)は、車枠(108)とその車枠(108)から延びるブレード支持体(112)により支持される採掘ブレード(110)とを有する。ブレード支持体(112)は、車枠(108)に対してブレード(110)を上昇又は下降させ、ブレードを長手方向にチルトさせる油圧シリンダー(114)を含む。マスト(128)は、ブレードから上方に延びると共にブレードと共に動く。傾斜計(134)は、ブレードと共に動くように搭載され、ブレード(110)の傾斜を示す情報を提示する。センサ(160)はブルドーザーの旋回を検出する。制御部(140)は、レーザ受信機(126)、傾斜計(134)及びセンサ(160)に対して応答するものであり、シリンダー(140)の動作を制御すると共にブレード(110)の位置を調整する。ブルドーザー(106)の急激な旋回が検出された場合、制御部(140)は、傾斜計(134)の間違った出力から生じるであろうエラーを抑制するように動作する。 (もっと読む)
掘削機の制御装置及び方法
【課題】
【解決手段】零傾斜の場所を横断する方向に対する建設現場又は工事現場の傾斜部分に位置する掘削機又はその他の機械の向きrを決定する装置である。零傾斜の場所を横断するこの方向は、傾斜部分の落下線の方向に対して垂直である。装置は、機械のピッチ角度Pitchを決定し、ピッチ角度出力を提供する第一の傾斜計を含む。装置は、機械のロール角度Rollを決定し、ロール角度出力を提供する第二の傾斜計を含む。最後に、装置は、上記ピッチ角度出力及び上記ロール角度出力に応答可能であり、次式、すなわちr=sin−1[Pitch/(Pitch2+Roll2)1/2];又はr=cos−1[Roll/(Pitch2+Roll2)1/2];又はr=tan−1[Pitch/Roll]の1つに従って、向きrを決定するプロセッサを含む。第一及び第二の傾斜計は、単一の二重軸線傾斜計とし又は、これら傾斜計は、適正に向き決めした1対の傾斜計とすることができる。装置は、3つの等式を連続的に使用するか又は、どの等式が最も正確な向き表示を提供するものと判断されたかに基づいて、色々な時点にて使用するため等式を選択することができる。例えば、機械の長手方向軸線が向き決めされる象限に基づいて等式を選択することができる。  (もっと読む)
(もっと読む)
器具の位置の非接触型決定を実行する方法及びシステム
本発明の実施形態は器具(410、540、630、720)の位置を非接触的に決定する方法或いは決定するシステムに関する。一実施形態においては、非接触型測定システムが移動機械に連結された器具の位置を決定する。移動機械の地理的位置を測定し(320)、器具(330)の地理的位置が、移動機械(330)の地理的位置及び器具の移動機械(310)に対する位置に基づいて決定する。  (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]