
セント・ジュード・メディカル・エイトリアル・フィブリレーション・ディヴィジョン・インコーポレーテッドにより出願された特許
1 - 10 / 57
二重偏向型電気生理学的カテーテル
【課題】ループ状部分をカテーテル本体のその他の部分に対して偏向させることができ、ループの角度を微調整することが可能な電気生理学的カテーテルを提供する。
【解決手段】電気生理学的カテーテル10は、近位領域14と、ネック領域18と、ループ状になろうとする性質を有し、且つ電極を含む遠位領域16とを有するチューブ状本体12を含む。第1の偏向ワイヤが、カテーテル本体の近位領域の少なくとも一部分を通じて延在し、且つ第1の扁平部分を含み、一方、第2の偏向ワイヤが、ネック領域と遠位領域の少なくとも一部分とを通じて延在し、且つネック領域内に第2の扁平部分を含む。第1の駆動ワイヤが第1の偏向ワイヤの扁平部分に接合され、一方、第2の駆動ワイヤが第2の偏向ワイヤの扁平部分に接合される。
(もっと読む)
磁気ガイドカテーテル
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
延在するアクティブ固定リード線の電気計測

【課題】 リード線12の組織14に対する接続を評価するためのシステム及び方法を提供する。
【解決手段】 新規なシステム10は、電極30を有するリード線本体24とリード線本体24の前記遠位端部28付近に配置された固定要素32とを含む。固定要素32はリード線本体24の遠位端部28を組織14に固着させるように構成される。システム10は電極30と固定要素32との間のエネルギー量を示す信号を生成するように構成されたメータ18をさらに含む。このエネルギー量は、電極30と固定要素32との間の静電容量またはインダクタンスを含んでもよい。システム10は、信号に応じて、リード線12と組織14との間の接続度を判断するように構成された電子制御装置20をさらに含む。
(もっと読む)
拡張流体ルーメンを備える可撓性チップカテーテル
カテーテル本体(100)と、カテーテル本体(100)に連結される細長電極とを有するカテーテル(100)用のルーメン拡張部材(126)が提供される。細長電極は、それを貫通して延在する電極ルーメンを画定する。ルーメン拡張部材(126)は電極ルーメン内に位置決めされ、カテーテル本体(100)に連結される。ルーメン拡張部材(126)は、側壁(134)と、側壁(134)を貫通して延在する少なくとも1つの開口(136)とを含むチューブ状部材を含む。 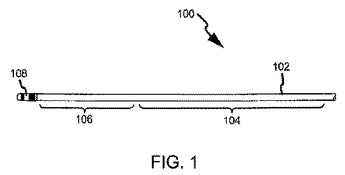 (もっと読む)
(もっと読む)
内部位置参照センサを使用した、動く器官における動きの補償
体内にある、動く対象領域を表示する装置(10)は、侵襲的医療装置(26)の位置および向き(P&O)を決定し、内部位置参照センサ(241)を使用して、時間に伴う対称領域の動きを追跡するように構成されたポジショニングシステム(20)を含んでいる。補償機能ブロック(28)は、(例えばROIの画像が取得された)第1の時間と(例えば装置(26)のP&Oが測定された)第2の時間との間の対象領域の動きを補償するように構成されており、対象領域の動きに基づいて、動き補償機能(28)を生成する。測定されたP&Oは、補償機能(28)を使用して補正される。医療装置(26)の表示は、補正されたP&Oに従って画像(18)上に重畳される。 (もっと読む)
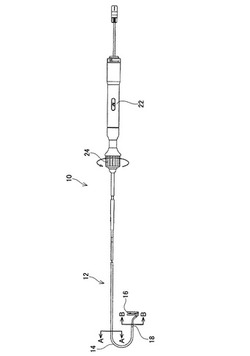
マルチルーメン型潅注チュービングを用いる潅注式カテーテル
潅注式カテーテル(10)は、近位潅注通路(16)と遠位潅注通路(14)とを有するカテーテル本体(12)を含む。第1の流体送給管(31)は、近位潅注通路(16)と流体連通し、且つ遠位潅注通路(14)から流体的に隔離されているのに対し、第2の流体送給管(33)は、遠位潅注通路(14)と流体連通し、且つ近位潅注通路(16)から流体的に隔離されている。典型的には、第1および第2の流体送給管(31,33)は、少なくともカテーテル本体(12)を通して、単一である。第1および第2の流体送給管(31,33)の全体形状は、そのルーメン(32,34)と同様に、潅注式カテーテル(10)の特別な用途に必要に応じて多様化されていてもよい。また、システム(10)は、潅注流体供給源および潅注通路を通じて潅注流体を供給する少なくとも1つのポンプ(26)を含んでいてもよい。 (もっと読む)
アブレーション治療の有効送達を評価するためのシステムおよび方法
【課題】身体14内の組織12に対するアブレーション治療効果の有効な伝達を評価するシステム及び方法が提供される。
【解決手段】組織12の解剖学的マップが体積74を規定するマップを伴って生成され表示される。指数は、前記体積74内における位置76に対応して生成される。前記指数は、前記位置76におけるアブレーション治療の状態を示している。前記指数は、前記位置76におけるアブレーション電極52の持続時間、供給されたエネルギー量、アブレーション電極52と組織12との間の電気的結合度及び温度などに由来しうる。前記位置76に対応する解剖学的マップのある部分における色の強度などの視覚的特徴は、前記指数に応じて変更される。
(もっと読む)
繰り返し屈曲させることに起因してカテーテル又はシースが軸方向に縮むことを低減する装置
屈曲自在な医療装置が、医療装置の屈曲自在な部分、例えばカテーテル(20)又はアクセスシース(50)の屈曲自在な先端部分(22)の軸方向縮みを低減又は解消するように構成されるストラット(58b)を含む。ストラット(58b)は医療装置において繰り返し屈曲を受けると考えられるセクションに同軸状に配置され得る。ストラット(58b)はコラム強度及び軸方向復元性の向上をもたらす。ストラット(58b)は、ステント様装置、複数のらせん状接続要素(961、962、963及び964)を含む接続格子(94)により連結された対向する端部(90、92)を有する細長装置、又は長手方向に延在する列(146)状に配列された複数の円周方向に延在するスロット(144)を有する管(142)であり得る。 (もっと読む)
ラミネート被覆編組アセンブリを有する医療装置
細長で展開可能な、及び場合により偏向自在な医療装置が、二重積層コーティングを有する編組アセンブリを含む。編組アセンブリは、編組部材間に間隙を提供するように編み合わされた複数の編組部材を含み、各編組部材は、導電素子と、導電素子を絶縁する軟質非導電性ポリマーコーティングと、熱可塑性接着剤コーティングとを有する。編組アセンブリは内側ポリマー層と外側ポリマー層との間に形成される。編組部材の1つ又は複数は、エネルギー送達素子に結合されてもよく、及び全体的に又は部分的に略平坦な部材から製造することにより、いわゆるプッシャビリティ及びトルク伝達特性を向上させ、且つリング電極、センサなどに対してより大きい、又は改良された1つ又は複数の接合個所を提供することができる。  (もっと読む)
(もっと読む)
ロボットカテーテルシステム入力装置
ロボット医療システム(10)用の入力装置(101)は、中心軸の周りに回転可能であり、且つ中心軸に沿って長手方向に変位可能であるように構成されたハンドル(102)を含む。入力装置(101)はまた、ハンドル(102)上に配置され、且つ入力装置に電気的に連結された可撓性医療器具の遠位端の偏向を選択的に制御するように構成された偏向制御要素も含む。ハンドル(102)を長手方向に変位させると、可撓性医療器具の対応する長手方向の動きが生じ、又は結果としてもたらされてもよい。ハンドル(102)を回転させると、偏向平面の対応する回転が生じ、又は結果としてもたらされてもよい。ハンドル(102)の長手方向変位及び回転は、電子的に検出又は検知されてもよい。ハンドル(102)は、1つ又は複数の新規の、公知の、又は従来のハンドルのパフォーマンスを模倣する装置と容易に交換することができる。 (もっと読む)
1 - 10 / 57
[ Back to top ]