
有限会社 生体機構研究所により出願された特許
1 - 1 / 1
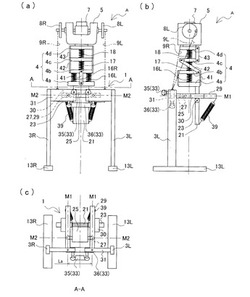
二足走歩行機構
【課題】バイタリティのある二足走歩行を実現する。
【解決手段】本機構を、左右一対の脚体3L,3Rを、それぞれの足先が前後方向へ交互に送り出し可能に連結してなる脚体ジョイント部1と、脚体ジョイント部1の上方に設けられるバランサ5と、脚体ジョイント部1とバランサ5との間に介在し、バランサ5を左右何れかに傾倒させ、その傾倒姿勢から起立姿勢を乗り越えさせて他方側の傾倒姿勢まで傾倒させるスナップ力を有してなる腰関節ジョイント部4と、バランサ5を起立姿勢を乗り越えさせ、バランサ5の傾倒姿勢を他方側へ切り換える切換手段と、を備え、脚体ジョイント部1を、切換手段でバランサ5の傾倒姿勢を他方側へ切り換えた際、腰関節ジョイント部4の揺動力によって、一方側の脚体を後方向へ送り出すとともに、一方側の脚体に連動して、他方側の脚体を前方向へ送り出すように連結して構成する。
(もっと読む)
1 - 1 / 1
[ Back to top ]