
ザ・スウォッチ・グループ・リサーチ・アンド・ディベロップメント・リミテッドにより出願された特許
41 - 46 / 46
寄生低周波生成の除去をした広帯域周波数シンセサイザ
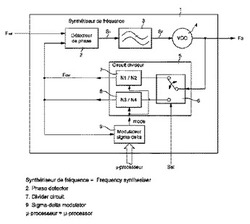
広帯域周波数シンセサイザ(1)が、高周波出力信号(FS)を供給するための電圧制御発振器(4)と、デュアルモード分周回路(5)と、分周回路の分周モードを選択するための手段(9)と、位相検出器(2)と、ローパスフィルタ(3)とを含む。位相検出器(2)は、基準周波数信号(Fref)を分周回路の分周した周波数信号(Fdiv)と比較して、発振器(4)の電圧を制御するためのフィルタリングした信号を供給する。分周回路(5)は、第1のモードM1における第1の分周係数N1で、又は第2のモードM2における第1の係数N1とは異なる第2の係数N2で、出力信号の周波数を分周して、分周した周波数信号(Fdiv)を供給する。選択手段(9)は、第1及び第2の分周係数N1及びN2により定められる周波数帯域において、分周回路の第1又は第2の分周モードを、プログラムした出力信号の周波数の関数として所定の時間により選択する。この周波数が周波数帯域の中心に近い場合、デュアルモード分周回路が、選択手段(9)のプログラミングに基づいて、第1のモードM1における第3の係数N3で、又は第2のモードM2における第3の係数N3とは異なる第4の分周係数N4でもって出力信号の周波数を分周する。少なくとも第3の分周係数N3又は第4の分周係数N4は、第1又は第2の分周係数N1又はN2とは異なる。この結果、第3及び第4の係数N3及びN4により定まる周波数帯域の中心が、プログラムした出力信号の周波数に対してシフトされる。 (もっと読む)
位置決めデバイス上の物体の位置および運動の光学認識システム
光学認識システムは、位置決めデバイス(2)上の物体(3)の位置および/または運動を確定する。位置決めデバイスには、物体を、回転駆動し、および/または、曲線または直線の経路に沿って駆動する手段(20,21,22)が含まれる。そして、光学認識システムは、物体の位置または向きを検出するための、デジタル・カメラ(6)などの光学検出手段と、検出手段によって供給されるデータのためのデータ処理ステーション(7)とを含む。所定数の異なる図形または基準は、物体の外部表面にわたって分布されている。物体の外部表面上での各図形の配置は、検出手段が、データ処理ステーションと連携して、位置決めデバイス上の物体の位置または向きを確定することを可能にする。図形は、円形バーコード(10)によって形成され、各円形バーコードは、位置決めデバイス上の物体(3)の正確な位置を規定する。  (もっと読む)
(もっと読む)
物体を全ての方向に位置決めするデバイス
位置決めデバイス(2)は、球状物体(3)を位置決めする、または、向き制御することができる。この球状物体は、位置決めデバイス(2)の3つの支持点(P,P’,P”)に設置され、重力によって保持される。位置決めデバイス(2)は、物体を回転駆動する手段を含む。任意の位置または向きの前記物体の重心は、3つの支持点によって形成される三角形内にある。駆動手段は、駆動部材(20、21、22)を含み、物体または球状要素の外部表面との駆動部材の接触部は、位置決めデバイスの支持点(P)のうちの1つを形成する。駆動部材は、球状物体の外部表面に接触して、前記物体を回転駆動する駆動ホイールを含む。ホイールの回転軸は、支持体(22)の端に搭載され、支持体(22)は、球状物体の外部表面上でのホイールの接触点(P)と物体の中心を通過する別の軸に沿って回転することができる。こうして、この駆動部材は、ホイールによって、物体に対する全ての方向の回転を課すことができる。他の2つの支持点(P’,P”)は、2つのボールおよびソケット接合部(30,40)を使用して作られ、ボールは、ボールおよびソケット接合部のハウジングにおいて空気クッションで保持される。  (もっと読む)
(もっと読む)
送信アンテナ用の放射図測定システム
測定システム(1)は、送信アンテナ(4’)の放射図を確定する。システムは、電子デバイス(4)に属する被測定送信アンテナ(4’)によって生成される電磁界を受信する少なくとも1つの固定受信アンテナ(5’)を備える受信機デバイス(5)と、位置決めデバイス(2)であって、位置決めデバイス(2)上に、電子デバイス用の支持要素(3)が設置される、位置決めデバイス(2)とを含む。位置決めデバイスは、送信アンテナを含む電子デバイスを有する前記支持要素を回転させるように駆動する手段を含む。測定システムは、さらに、送信アンテナの位置または向きを検出するための、デジタル・カメラ(6)などの検出手段と、検出手段および受信機手段によって供給されるデータ用のデータ処理ステーション(7)とを含む。球状要素は、被測定送信アンテナ(4’)を有する電子デバイス(4)を確実に収容するために中空である。球状要素は、3つの支持点(P、P’、P”)で重力によって位置決めデバイス上に保持され、3つの支持点のうちの1つは、球状要素を位置決めデバイス上で全ての方向にランダムに回転させる、球状要素の外部表面と接触する駆動部材(20,21,22)によって形成される。位置決めデバイスの2つの他の支持点は、それぞれ、ボールおよびソケット接合部(30、40)を使用して形成される。円形バーコードの形態のいくつかの図形は、システムが、デジタル・カメラによって球状要素の位置または向きの全てを確定することを可能にするよう、球状要素の外部表面上に配列される。  (もっと読む)
(もっと読む)
ノイズリダクションを持つ無線周波数信号の受信及び/又は送信用の装置
無線周波数信号の受信及び/又は送信用の装置は、無線周波数信号を捕捉するか、あるいは送信するアンテナ(8)、バンドパスフィルタ(9)、フィルタリングされた信号を増幅する少なくとも1つの低ノイズ増幅器(11)、第1の高周波信号(SVCO)を発生させる発振段(1)、上記第1の高周波信号の周波数をM(ここで、Mは1よりも大きい整数である)で分周して、第2の高周波信号(SD)を発生させる少なくとも1つの周波数分周器(14)、フィルタリングされ、かつ増幅された無線周波数信号(SR)を、上記第1の高周波信号(SVCO)と混合する少なくとも1つの第1のミクサユニット(12)、及び、上記第1のミクサユニットにより供給された中間信号を、上記第2の高周波信号と混合して、ベースバンド信号(IR,QR)を作り出す少なくとも1つの第2のミクサユニット(13)を含む。周波数が、上記バンドパスフィルタの周波数帯外にあって、かつ、1と2の間の係数M/N(ここで、Nは1よりも大きい整数である)だけ受信した無線周波数信号の周波数より高い周波数である第1の高周波信号(SVCO)を発生させるように発振段(1)が構成されている。  (もっと読む)
(もっと読む)
特に太陰太陽暦において可変周期の値を表示する機構

【課題】太陰太陽暦機構、特に計時器において、太陰月表示機構を提供すること。
【解決手段】機構は、閏年の追加の月の位置を決定する板(207)を同心状に含む。板は、12の月のスケールに関連付けられた針(216)を備え、制約デバイスによって永続的に制動される遊星車(208)を担持する。各新月において回転の12分の1にわたって駆動される駆動車が遊星車と噛み合い、それにより板と針を進行させる。閏月の開始時、ストップつめ(210)は、遊星車のストップ要素(209)のストップ部材を形成し、したがって車を回転させ、針が先行月の番号の近くに留まるように、駆動車(201)が回転している際の制約デバイスの力を克服する。ストップつめの位置は、ショルダ(216)が12の異なるレベルを有することができる年カム(215)によって決定される。この機構は、特に中国暦表示において使用することができる。
(もっと読む)
41 - 46 / 46
[ Back to top ]