
ハンガー オーソペディック グループ インコーポレイテッドにより出願された特許
1 - 4 / 4
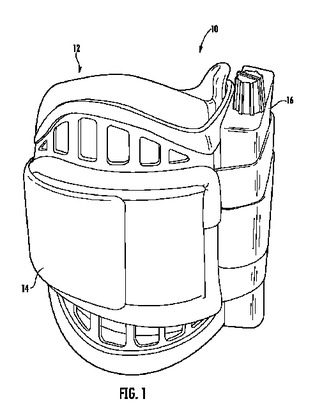
カフアセンブリ
ユーザーの肢の周りに位置決めされかつ機能的電気刺激システムを支持するよう構成されたフレームアセンブリと、該フレームアセンブリを肢に固定するよう構成されかつ該フレームアセンブリに連結されたオーバーセンター閉鎖機構とを含み、フレームアセンブリが肢の周りに位置決めされたときにオーバーセンター閉鎖機構が肢の内側に位置出しされる、カフアセンブリ。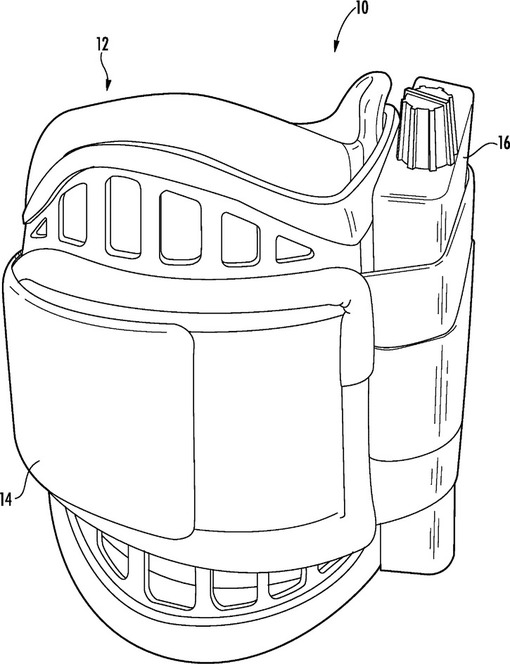
 (もっと読む)
(もっと読む)
補綴装置および真空を使った接続システム
補綴装置は、真空を使って人に接続するための接続部分と、接続部分を人に接続するのに使われる真空の量を制御する制御構造からなり、制御構造は、接続部分を人に接続するのに使われる真空の量を制御するための、接続部分と流体通信している真空ポンプ(502)と、接続部分中の真空の量を示す信号を提供するように構成された真空感知メカニズム(506)と、補綴装置の加速度と、補綴装置の向きと、補綴装置によって経験された力と、補綴装置によって経験された力の方向の少なくとも1つを示す信号を提供するように構成された動き感知メカニズム(509)と、真空感知メカニズム(506)と動き感知メカニズム(509)からの信号を受け取り、真空ポンプ(502)を制御するように構成されたコントローラと、を含む。  (もっと読む)
(もっと読む)
真空を使用する人工装具デバイスおよび接続システム
開示される人工装具デバイスは、人の肢を受けるためのレセプタクル;人の肢にレセプタクルを接続するために使用される真空度を維持するためのレセプタクルと流体連結している真空ポンプ;制御器;および/または電子的に制御可能な流体制御デバイスを含み得る。制御器は、ユーザーインターフェースで表示されるべき真空シグニチャーを提供し、かつ/または人の肢にレセプタクルを接続するために使用される真空度を制御するように設定され得る。
 (もっと読む)
(もっと読む)
医療器具を製造するシステム及び方法
本発明は、一般に、医療器具を設計及び製造する目的で(これに限定されないが)及び三次元映像の他の医療関係用途のために、三次元映像を捕獲するのに使用される方法及びシステムに係る。本発明のシステムは、一般に、三次元デジタル化システムと、直接変換コンピュータ支援設計(CAD)ソフトウェアと、中央製造センター(CFC)及び/又は少なくとも1つの他の製造センターで構成される中央製造ネットワーク(CFN)と、好ましくは、少なくとも1人の従事者を中央設計センター(CDC)に通信接続するネットワークとを備えている。更に、本発明は、ある設計プロトコル、並びに従事者のための訓練/教育も包含することができる。 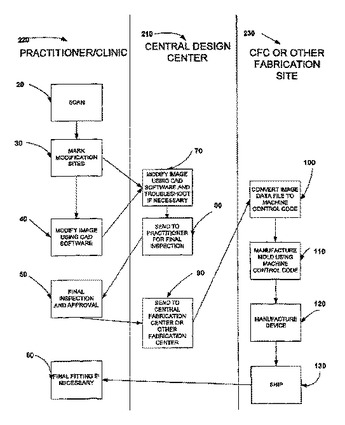 (もっと読む)
(もっと読む)
1 - 4 / 4
[ Back to top ]