
インダストリー−アカデミック コーオペレーション ファンデーション,ヨンナム ユニバーシティーにより出願された特許
1 - 2 / 2
無線測位方法
受信ノードで送信ノードとの距離を求めて位置を測位する方法であって、送信ノードから測位信号を受信して遅延タブを測定し、遅延タブを用いて受信ノードと送信ノードとの間の距離を臨時に決定し、基準距離と比較した後、伝播遅延を用いた距離推定方法および遅延拡散を用いた距離推定方法のいずれか1つを選択して最終距離を推定する。 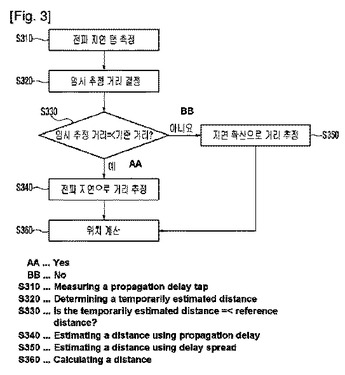 (もっと読む)
(もっと読む)
圧力センサーアレイを用いた自動速度調節トレッドミルおよびファジー論理

【課題】運動者が手動で速度を調節せずに、運動者の運動速度に応じてウォーキングベルトの速度調節が自動制御されるようにする。
【解決手段】本発明は、圧力センサーアレイを用いた自動速度調節ランニングマシンおよびその動作方法に関する。この自動速度調節ランニングマシンは、ウォーキングベルトと、運動者の足の荷重を感知して荷重感知信号として出力する多数の圧力センサーからなる圧力センサーアレイと、運動者の歩幅速度および歩幅速度の変化量を格納する歩幅速度状態格納部と、前記荷重感知信号を用いて運動者の歩幅速度を演算した後、以前の歩幅速度と現在の歩幅速度との差を歩幅速度変化量として算出し、運動者の運動中心地点を算出した後、前記歩幅速度変化量と前記運動中心地点を考慮して前記ウォーキングベルトの駆動速度を比例的に加速/減速するアルゴリズムを備えた制御部とを含んでなる。
(もっと読む)
1 - 2 / 2
[ Back to top ]