
エムベーデーアー フランスにより出願された特許
1 - 7 / 7
動荷重ベンチ
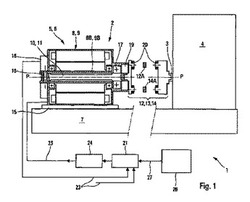
本発明は、制御型再現手段(2)によって供給される径方向荷重および可変トルクをアクチュエータなどの被試験装置(4)の回転シャフト(3)に印加する荷重ベンチに関する。制御型再現手段(2)は、平行に、かつ、試験対象の回転シャフト(3)に対して対称的に配置された2個の同一の再現モジュール(5、6)を含み、個々の再現モジュールは、トルクモータ(8、9)と、トーションロッド(10、11)と、トーションロッドを被試験機構部の回転シャフト(3)に接続する接続ロッド・クランク接続部(12、13、14)とを備える点が有利である。 (もっと読む)
移動体の軌道の概算方法および概算用システム

本発明のハイブリッドシミュレーションの方法は、移動体が取り付けられた運動シミュレータおよび移動体の到達予定の目標を表すターゲットに運動指令を提供するシミュレーションツールを用い、この移動体の第1の指定目標のオーバーシュートまたは変更を表す事象を検出した後に、この方法は、トランジション運動指令に応じて運動シミュレータによって実行された位置と所定の第1の設定ポイントの位置とを比較して、第1の設定ポイントの位置に実質的に等しい位置が検出された場合には第1マーカーを起動すること、トランジション運動指令に応じてターゲットによって実行された位置と所定の第2の設定ポイントの位置とを比較して、第2の設定ポイントの位置に実質的に等しい位置が検出された場合には第2マーカーを起動すること、を含む、移動体の第2の指定目標に関連付けられる位置調整段階、第1マーカーおよび第2マーカーが起動している場合に、デジタルシミュレーションツールにより運動シミュレータに提供される現在の運動指令と、デジタルシミュレーションツールによりターゲットに提供される現在の運動指令との差分を計算する工程、および、この差分が所定の閾値よりも小さい場合は、シミュレーションツールからの運動指令に、該運動指令が運動シミュレータおよびターゲットに与えられる前に、設定ポイントの位置にリンクされる補正項を与えることを含む、操縦段階、を含む。 (もっと読む)
パルスデトネーションエンジン
本発明によれば、エンジン(I)は、フレームチューブ(2)の燃焼室(7)への燃料供給のための手段を含み、燃料を受けるための容積が可変である移送室(9)と、エンジン(I)のタンク(4)から移送室(9)への燃料移送手段(10)と、移送室(9)から燃焼室(7)へ燃料を噴射するための噴射手段(11)と、を備える。エンジンは、少なくとも部分的に、移送室(9)内に含まれる燃料により画定される弾性戻り手段をさらに含む。 (もっと読む)
パルスデトネーションエンジン
本発明によると、エンジン(I)は、可動横断端壁(18)を設けた少なくとも1つのフレームチューブ(2)を有し、上記フレームチューブ(2)の周りに外部膜(3)を備え、これは、周辺環状空間(4)を画定し、そこに、固定された流動ガイド(11,12,13,14)が位置決めされ、これらの流動ガイドは、空気用流動経路(10)を形成し、少なくとも1つの可動プラグ(25)は、上記可動端壁(18)に接続し、上記流動経路(10)の一つを開閉する。 (もっと読む)
移動体の慣性ユニットを検査するための方法およびシステム
本発明の方法は、現実のナビゲーション環境における計算による移動体の軌道と、少なくとも1つの基準軌道とを比較することによって、角運動シミュレータ2に搭載されている移動体の慣性ユニット3を検査するハイブリッドシミュレーションを実施する。 (もっと読む)
空燃混合器で作動するパルスデトネーションエンジン
本発明は空気−燃料混合物で作動するパルスデトネーションエンジンに関する。本発明によれば、このエンジン(1)は少なくとも2つのプリデトネーション管(4、5)を備え、これの管は熱封鎖状態に近い状態で作動し、これからの衝撃波が燃焼室の点(19)に集中する。 (もっと読む)
移動体の慣性ユニットの機能検査方法
移動体用慣性ユニット(7)を検査するためのシステムであって、該ユニットは、運動シミュレータ(3)に搭載され、システムは次を含む。運動シミュレータ(3)に搭載された慣性ユニット(7)の理論モデル化(M1)、該理論モデル化は、慣性ユニット(7)によって測定されたとみなされる測定慣性データ(R)を表す理論慣性データ(T1)を供給する;現実の航行環境における慣性ユニットのモデル化を含むシミュレーションモデル化(M2)、該シミュレーションモデル化には、操縦命令(D2)が供給され、かつ該シミュレーションモデル化は、現実の航行環境における慣性ユニットからの出力データを表すシミュレーション慣性データ(T2)を供給する;測定慣性データ(R)、シミュレーション慣性データ(T2)、および理論慣性データ(T1)の関数として操縦命令(D2)の計算;ならびに移動体の軌道とリファレンス軌道を比較することによる慣性ユニット(7)の検査。 (もっと読む)
1 - 7 / 7
[ Back to top ]