
ロボティクス テクノロジー リーダーズ ゲーエムベーハーにより出願された特許
1 - 3 / 3
床面沿いに可動な装置の位置を検出するローカライゼーションシステム
本発明に係るローカライゼーションシステムは、床面沿いに可動な装置の状態を検出するためのものであり、複数個のフロア送受信機を有し、そのフロア送受信機がそれぞれ床面沿い位置の点状標識となるフロアアンテナを有するフロア送受信システムと、当該可動な装置に装着され、床面を向く送受信面を有し、且つフロアアンテナのうち複数個の位置をその送受信面で同時的且つ連続的に検出する送受信タブレットと、を備える。 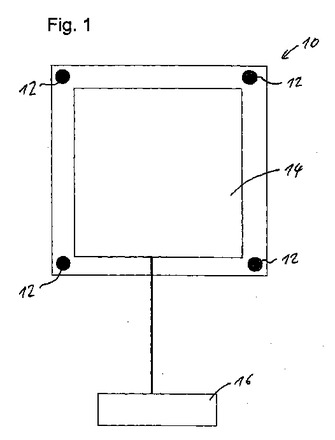 (もっと読む)
(もっと読む)
マニュピレータアームを運搬するエアクッションプラットフォーム及び移動可能ロボット
本発明に係るエアクッションプラットフォーム(10)は、マニュピレータアーム(12)を運搬するため、その底面に装着されているエアクッションシステム(32)が作動するとフロア(34)の上方で静止時位置から移動時位置へと上昇するベース(26)と、フロア(34)に沿いベース(26)を移動させるため選択的にフロア(34)に安定接触させうるようベース(26)に締結された少なくとも1個のアクチュエータデバイス(22)と、プラットフォーム(10)が移動時位置を占めているときだけ後者を作動させるようシステム(32)及びデバイス(22)に接続されたコントローラと、を備える。本発明に係る移動可能ロボットは、プラットフォーム(10)に搭載されたペデスタル(16)、その先端に装着されたアーム(12)及びその先端(30)に装着されたツール(14a,14b)を運搬し且つ可制御的に案内する。  (もっと読む)
(もっと読む)
蠕虫状機構
本発明は蠕虫状機構に関し、該機構は、当該機構の長手方向に延びる支持構造(10)と、前記支持構造(10)の長手方向に沿って順に配列された少なくとも2つの駆動ユニット(14)と、を備え、前記駆動ユニットの各々は、前記支持構造(10)の長手方向に沿って相互にある間隔をあけて,前記支持構造(10)の長手方向に対して横向きの状態で装着された2つの支持要素(11)と、前記支持要素(11)同士の間に配設され、前記支持要素(11)同士を相互に対して相対的に動かすことができるようにするための、少なくとも1つの駆動要素(12)と、を有する。簡素なほっそりした構成でありながら正確な開ループ又は閉ループの動き制御を行う更なる蠕虫状機構を提供するために、駆動要素(12)は個別に又はグループごとに中央ライン(31,35)により駆動される。  (もっと読む)
(もっと読む)
1 - 3 / 3
[ Back to top ]