
アーベーベー・アーゲーにより出願された特許
1 - 4 / 4
工具
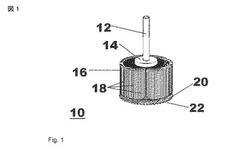
【課題】ワークピースの少なくとも1つの表面領域を機械加工できる可能性を与える工具を提供する。
【解決手段】本発明による実施の形態は、スピンドルに接続され、このスピンドルを駆動させるための駆動部を具備し、このスピンドルに着脱可能に取着される、ワークピース(24)の表面機械加工のための工具(10)において、この工具(10)には、少なくとも2つの作業面が設けられており、これら作業面は、ワークピース(24)を同時に機械加工する目的のために、前記駆動部により駆動されることを特徴とする工具(10)である。
(もっと読む)
産業用ロボットのティーチングのための方法及びそれに対応して装備された産業用ロボット

【課題】キーボードまたはジョイスティックによるプログラミングによらず、簡単に短時間でティーチング可能な方法を提供する。
【解決手段】少なくとも一つの可動の関節式アーム14を有する産業用ロボットのための、運動プロセスをティーチングする方法であって、以下のステップに基づいて行う。1.関節式アーム14の先端手首に測定システム22の取り付け。2.関節式アーム14の自由端にエンドエフェクタ20であるハンドリング器具28の取り付け。3.オペレータによる前記ハンドリング器具28の手動操作。4.測定システム22によりハンドリング器具28の位置を検知。5.検知された位置を6次元で座標データへ変換。6.ロボットコントローラに座標データを記憶。
(もっと読む)
ハンドリング装置をキャリブレートするシステムおよびその方法
本発明は、ハンドリング装置(4)をキャリブレートするシステムおよびその方法に関連する。本発明に従うと、ワークピース(2)が、ハンドリング装置(4)およびツール(6)に配置されている少なくとも1つの測定装置(8)によって移動されるとき、少なくとも1つの制御された変量が検出される。上記ワークピース(2)にある少なくとも2つの表面(A,B)は、上記測定装置(8)、上記ツール(6)および上記ワークピース(2)と相互作用する制御装置(10)によって、検出された制御された可変的な測定値を用いて、多次元領域において規定される。最適な軌道のコースの軌道座標は、規定され、さらに/または交点(S)からの構成的なラインから、変換のために備えられる。 (もっと読む)
ワークピースを自動的に処理および/または機械加工するためのシステム及び方法
本発明は、ワークピース(2)を自動的に機械加工および/または処理するためのシステム及び方法に係る。このシステムは、少なくとも一つの制御変数(9)を検知するための少なくとも一つの測定装置(8)を備えた、少なくとも一つのハンドリング・デバイス(4)、特にロボットまたは産業用ロボット、を有している。前記システムは、少なくとも一つの測定装置(8)と協働する少なくとも一つの制御ユニット(10)を備えていて、それぞれの機械加工および/または処理プロセスが、前記少なくとも一つの制御変数を考慮に入れることにより最適化される。  (もっと読む)
(もっと読む)
1 - 4 / 4
[ Back to top ]