
株式会社金井電機製作所により出願された特許
1 - 2 / 2
動力伝達機構及びこの動力伝達機構を使用したロボット
【課題】多数のカムやギヤ等を連結しなくとも、回転軸への揺動板の取り付け方により、回転軸の駆動を特殊な揺動運動に変換する動力伝達機構と、これを水中での推進力を得るロボットとしとして提供する。
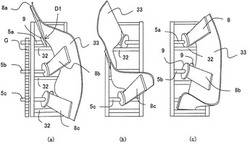
【解決手段】回転軸5a,5b,5cには、第1の揺動板8が等間隔で配され、この第1の揺動板8が回転軸5a,5b,5cに対する傾斜角度は同じで、回転軸5a,5b,5cに対する取り付け方向(「位相」)が順に規則的にずれて配されている。
(もっと読む)
動力伝達機構およびこの動力伝達機構を使用したロボット

【課題】多数のカムやギヤ等を連結しなくとも、回転軸への揺動板の取り付け方により、回転軸の駆動を特殊な揺動運動に変換する動力伝達機構と、これを多足歩行の玩具等に適用した駆動力推進構造体として提供する。
【解決手段】回転軸5には、第1の揺動板8が等間隔で複数配され、この複数の第1の揺動板8が回転軸5に対する傾斜角度θ1は同じで、回転軸5に対する取り付け方向(「位相」)が順に規則的にずれて配されている。図1は、ムカデのような多足歩行玩具として、上記動力伝達機構D1を有する駆動力推進構造体(多足歩行の玩具)1に適用した例である。
(もっと読む)
1 - 2 / 2
[ Back to top ]