
テノヴァ ソシエタ ペル アチオニにより出願された特許
1 - 4 / 4
シリンダを測定するための方法及び装置
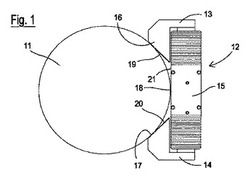
作動シリンダの幾何学的形状を、特にその研磨操作中に、明らかにするための機器は、固定中間構造体(15)に関して互いに遠ざかる方向及び近づく方向に動くことができる一対の可動クランプ(13、14)を備え、クランプ(13、14)は、該クランプ間と固定中間構造体(15)の表面(21)との間に位置決めされた被測定シリンダ(11)に対して燕尾形配置に従う、互いに対向する向きの傾斜面(19、20)を有し、可動クランプ(13、14)の表面(19、20)及び固定中間構造体(15)の表面(21)は、シリンダ(11)が静止していても回転していても、常にシリンダ(11)との接触を保ち、固定構造体(15)はまた、その内部に、クランプ(13、14)の動きを相関させるための、互いに相互作用する部材のグループ(32、33;29、43;28、35、36、37、38)有する。 (もっと読む)
電極をロックする点を調整するデバイス
本発明は、溶解炉の電極をロックする点を調整するデバイス(10)に関する。本デバイスは、前記電極を支持して電極へ電力を供給するバイス(120)を備え、本デバイスは、前記バイス(120)に結合されていて前記電極を支持する手段及び前記電極を垂直に運動させる手段を含む構造(13)を備えていることを特徴としている。  (もっと読む)
(もっと読む)
円筒体研削の欠陥及び実施方式の分類方法
積層円筒体の研削の欠陥及び実施方式の分類方法(100)であって、次のステップ、即ち、a)円筒体の複数の表面測定を示すマップ中の欠陥領域を識別するステップと、b)識別された各欠陥領域について複数の典型的なパラメータを計算するステップと、c)計算された典型的なパラメータに基づいて、識別された欠陥領域と関連した欠陥のタイプを識別するステップと、d)識別された欠陥の各タイプについて特有の欠陥の合格性しきい値を求めるステップ(120)と、e)欠陥領域の欠陥タイプと関連した合格性しきい値と、円筒体の複数の表面測定値のうちで欠陥領域と関連した測定値との比較に基づいて各欠陥領域について是正措置を定めるステップ(130)と、f)ステップc)で定められた是正措置が欠陥を除去するための研削作業である場合、表面測定値に基づいて研削パラメータを求めるステップ(140)とを有する、方法(100)。  (もっと読む)
(もっと読む)
圧延シリンダーのための振れ止め装置を研削盤に位置決めし且つその取出しを阻止する装置及び方法並びにその装置又は方法を用いる研削盤
本発明は、振れ止め装置(10)用の位置決め・阻止装置(20)に関する。本発明による位置決め・阻止装置(20)は、振れ止め装置(10)を位置決めし且つその取出しを阻止する装置である。本発明による位置決め・阻止装置(20)は、並進手段(23)を備えた実質的に平らなキャリジ(21)と、阻止手段(22)とを有している。阻止手段(22)は、磁気式である。好ましくは、磁気式の阻止手段(22)は、全体的に設定することができる磁界を発生させる。好ましくは、位置決め・阻止装置(20)は、磁気式の阻止手段(22)自体によって発生させた磁界と反対になるように構成された反対磁界発生装置(25)を有している。  (もっと読む)
(もっと読む)
1 - 4 / 4
[ Back to top ]