
東和パーツ株式会社により出願された特許
1 - 2 / 2
揺動差分減速機
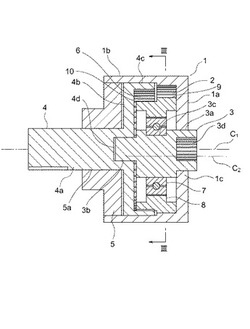
【課題】本発明は、小型かつシンプルな構成で、高い減速比を得ることを目的とするものである。
【解決手段】揺動歯車体8は、軸線C2を中心として揺動軸部3cに対して回転可能である。揺動歯車体8の外周部には、入力側内歯車2と噛み合う入力側外歯車9と、出力側内歯車6と噛み合う出力側外歯車10とが形成されている。入力側外歯車9は、入力軸部3aを中心としたクランク軸3の回転により入力側内歯車2と噛み合いながら入力側内歯車2の内側を揺動(公転)される。出力側外歯車10は、入力側外歯車9と一体に回転されて、出力側内歯車6と噛み合いながら出力側内歯車6の内側を揺動(公転)される。入力側内歯車2の歯数と出力側内歯車6の歯数との差が、入力側外歯車9の歯数と出力側外歯車10の歯数との差に等しくなっている。
(もっと読む)
多段直動アクチュエータ及びロボットハンドの指機構

【課題】ロボットハンドの指機構の屈伸用駆動系の簡素化を可能とするようなアクチュエータの提供。
【解決手段】進退動を行う直動軸3(3a、3b、3c)を有した複数の直動モータ2(2a、2b、2c)を組み合わせて多段直動アクチュエータ1を形成する。それについて、直動モータそれぞれの直動軸を中空構造として軸腔を有するように形成し、そして隣接前段の直動モータの直動軸の軸腔に対し隣接後段の直動モータの直動軸が挿通するように、各直動モータを組み合わせることで、各直動モータそれぞれの直動軸が同一の軸芯上で個々に進退動をなせるようにしている。
(もっと読む)
1 - 2 / 2
[ Back to top ]