
モンテリス メディカル, インコーポレイテッドにより出願された特許
1 - 2 / 2
定位駆動システム
細長い部材の運動を制御するための駆動システムは、第1の回転ノブおよび第2の回転ノブを有する基部ユニットと、ガイドレールに摺動可能に連結される従動子を含む従動子アセンブリと、長手方向運動ワイヤと、回転運動ワイヤとを含む。従動子は、長手方向運動滑車と、回転運動滑車と、細長い部材がそれに取付可能であるように、細長い部材を受容するように構造化される整合要素とを含む。長手方向運動ワイヤは、第1のノブの回転が、従動子をガイドレールに沿って長手方向に駆動するように、第1の回転ノブを長手方向運動滑車に動作可能に連結する。回転運動ワイヤは、第2のノブの回転が、整合要素および取り付けられた細長い部材を回転させるように、第2の回転ノブを回転運動滑車に動作可能に連結する。 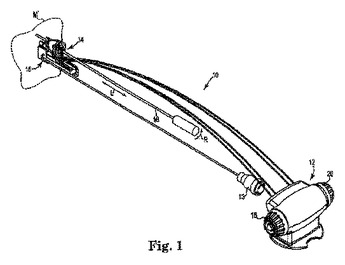 (もっと読む)
(もっと読む)
軌道ガイド
所望の経路に沿って生体対象の標的部位へのアクセスを提供するための軌道ガイドは、クランプロックを含む基板と、基板内に少なくとも部分的に含まれ、その中にチャネルを有するガイド部材と、各々が第1の端部および第2の端部を含み、第1の端部が基板に連結される、複数の調整可能な脚部と、各調整可能な脚部に連結され、調整可能な脚部の所望の長さを設定するために、非係止位置と係止位置との間で移動可能である、脚部ロックとを備え、調整可能な脚部およびガイド部材は、標的に向かってガイド部材内のチャネルを通って延在する、3次元空間内の無数の軌道を提供するよう調整されるように構造化される。  (もっと読む)
(もっと読む)
1 - 2 / 2
[ Back to top ]