
デルフト ユニバーシティー オブ テクノロジーにより出願された特許
1 - 1 / 1
システム操作者支援のための支援制御装置を備えたシステム、制御操作支援装置、制御操作支援方法、運転操作支援装置、及び運転操作支援方法
走行目標経路生成回路が、制御対象物の現在位置から制御対象物が将来走行することができる走行目標経路を算出し、理想制御信号算出回路が、走行目標経路Pに沿って走行するための制御プロフィールS’を算出し、差異算出回路が、理想制御の大きさS’と制御の現在の大きさS’との差異δを算出する。そして、制御システム支援制御装置は、算出された差異δの大きさに基づいて制御システムを制御することにより、操作者の制御操作を支援する。これにより、理想的な制御状態、操作者の制御操作状態、環境状態及び要求される操作精度からの差異δの大きさの関数である制御操作の支援を運転者に提供することができるので、操作者、環境及び制御対象物を特徴づける諸条件に適した制御操作支援制御を出力することができる。 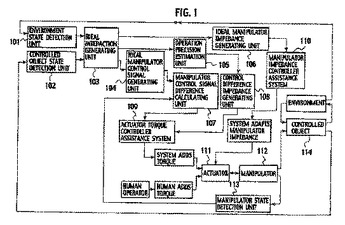 (もっと読む)
(もっと読む)
1 - 1 / 1
[ Back to top ]