
有限会社杉浦機械設計事務所により出願された特許
1 - 1 / 1
サービスロボット
【課題】高い処理能力を必要とせずに多様な行動を自律的かつインタラクティブに取ることが可能なサービスロボットの制御技術を提供する。
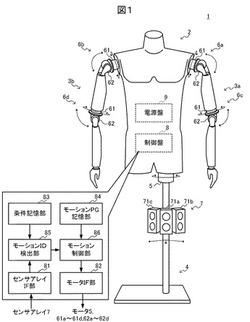
【解決手段】条件記憶部83は、センサアレイ7を構成する赤外線測距センサ71a〜71cごとに、モーションプログラムとこのモーションプログラムの実施条件であるセンサ値範囲との対応関係を記憶している。モーションID検出部85は、センサアレイ7を構成する赤外線測距センサ71a〜71cのセンサ値を順番に繰り返し取得し、センサ値の取得元の赤外線測距センサ71a〜71cの実施条件のなかから、取得したセンサ値を含む実施条件を検出する。そして、この実施条件に対応付けられているモーションプログラムを実行してモータ5、61、62を制御し、腕付きトルソ型サービスロボット1に行動をさせる。
(もっと読む)
1 - 1 / 1
[ Back to top ]