
ソフトロニクス株式会社により出願された特許
1 - 9 / 9
スイッチングコンバータ
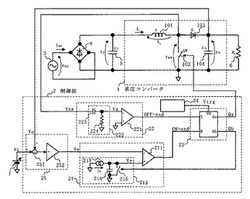
【課題】電流臨界モード動作の昇圧コンバータにおいては、リアクトルの充電エネルギが放電を完了した時点でスイッチをターンオフさせる必要がある。そのためにリアクトル電流をシャント抵抗や電流センサで検出したり、リアクトル端子電圧をリアクトルに巻かれた2次巻き線から検出することが行われている。
【解決手段】本発明によれば、スイッチ端子電圧の電圧傾斜の変化を検出することによりリアクトルの充電エネルギの放電完了の検出が可能で、リアクトル電流やリアクトル電圧を検出することなく、電流臨界モードの昇圧コンバータ制御を行うことができる。
本発明をPFCインバータに適用すれば、シャント抵抗などによる電流検出不要の電源システムが実現できる。
(もっと読む)
自動ドア施錠機構

【課題】 ロータリエンコーダの回転位置信号を用いてサーボモータを位置制御し、自動ドア装置のドア位置を固定する施錠機構は、ロータリエンコーダを収容するためのスペースを必要とし、自動ドア装置を小型化するためには好ましくない。また、ロータリエンコーダ等がコストアップの要因となる。
【解決手段】 ブラシレスモータに本来備わっている複数のホール素子を用いて、駆動用磁石の主磁極から直接、検出信号を複数の正弦波として得る、位置検出手段をもつブラシレスモータと、位置信号検出手段と、位置制御サーボによる制御手段と、からなる自動ドア装置の施錠機構を提供する。
これにより、ロータリエンコーダやレゾルバ等の回転位置検出装置を不要とした。
(もっと読む)
位置検出装置
【課題】トランスの原理を応用した従来のレゾルバをブラシレスモータの回転位置検出に用いる場合は、モータの回転軸とレゾルバのロータ側巻線との機械的位相角を一定の値にするための調整が必要であり、多数のモータの製造においてコストアップの要因となっている。
【解決手段】複数のホール素子を用いて、駆動用磁石の主磁極から直接、整流のための位置検出信号を得るブラシレスモータにおいて、ホール素子の検出信号を複数の正弦波とし、これらの検出信号からモータの回転位置情報を得ることを目的とした位置検出装置を提供する。
モータの回転軸に固定された駆動用磁石の磁束を直接検出するので、従来のレゾルバで必要であった機械的位相角の調整を不要とした。
(もっと読む)
電池電圧検出回路
【課題】リチウムイオンなどの電池セルを組電池として使用する場合、各電池セルの端子電圧を監視する必要がある。電圧検出回路として、汎用の半導体素子およびICを使用することが可能で、高精度の抵抗の使用数を最低限とした回路を提供する。
【解決手段】組電池1の正または負極の基準電位に置いた1個の可変定電流電源2の出力電流を、電流切換器3により各電池セル電位に切換供給し、各電池セルB1〜Bnごとに前記出力電流を抵抗R4−2〜R4−nにより変換した電圧と、各電池セルの端子電圧との大小比較を行い、その結果を前記基準電位において検知する。また、大小比較結果を監視しながら、前記出力電流を変化させ、前記比較結果の大小が反転した時点の出力電流から該電池セルの端子電圧を検知する。汎用ICであるOPアンプおよびコンパレータを使用し、高精度の抵抗の使用数を最低限とした回路構成である。
(もっと読む)
通風制御装置
【課題】従来、部屋の窓などの開口部の空気の流れの通風制御が十分ではなく、部屋の換気の役割は一定の範囲で果たせても、突然の強風には対応できない。
【解決手段】風の方向や風速によって空気抵抗の異なる、可動羽根板と羽根板の保持機構などからなる通風制御装置を部屋の窓に設置することにより、部屋の空気の出入りを好適に保つことができる。 すなわち、風の方向に関しては、部屋からの排出および流入いずれの方向に対しても、風速が低ければ小さな空気抵抗を示し、外部から流入する風速が高ければその度合いに応じて大きな空気抵抗を示す、あるいは遮断するように可動羽板の調整機構を設定する。 風速と空気抵抗の関係は調整可能であり、個々の条件に応じて好適な状態が得られる。
(もっと読む)
モータ装置
【課題】ブラシレスモータの、回転速度対トルクの静特性は、ほぼ直線特性を示す。これに対して、使用されるモータは、起動時は回転速度は停止または低速であるものの、大きなトルクを必要とし、その後、定常回転に達すると低トルクでよいが、高速回転を求められる場合が多い。すなわち、直線特性ではなく、両軸に漸近する双曲線に近い特性が求められる。
【解決手段】ブラシレスモータにおいて、直列接続された複数のステータ巻線をもち、各相の複数巻線の接続点にタップを設け、全相一括でタップを切り換えるか、もしくは複数の駆動装置の複数の駆動出力で各タップを一括で切り替えて、ステータ巻線をドライブすることにより、出力トルクの適当な値の前後において、巻線の巻数を変更する効果が得られる。これにより、変速機構を追加する場合に比べ、総合効率の低下やコスト増などを最小限に抑えたうえで、前述の実用上の要求を満たすことができる。
(もっと読む)
電動モータ付自転車とそれを制御するプログラム
【課題】トルク検出機構を用いず人力トルクを検出し、人力トルクに応じて電動モータを制御する事が具体的に実現できる電動モータ付自転車と制御プログラムを提供する。
【解決手段】アシスト制御処理部3のモータトルク算出機能手段31は、運転・停止判定が運転ならば、モータ制御部2に印加電圧V1、2を極短時間づつ順次指定し、モータ電流測定部6での各測定電流Im1、2からモータトルクTm1、2を算出する。回転速度算出機能手段32は、各印加電圧V1、2の指定後、印加電圧を極短時間内に変化させ、測定電流が略ゼロの時の印加電圧Vxd1、2から回転速度Nx1、2を算出する。人力トルク算出機能手段33は、Tm1、2とNx1、2から人力トルクを算出する。アシスト出力決定機能手段34は、人力トルクに応じた補助トルクを発生させる印加電圧をモータ制御部2に指定し、所定時間が経過後、以上の繰り返しを指示する。
(もっと読む)
モータ装置
【課題】ブラシレスモータのステータ各相に複数の巻線を有する場合、複数の巻線を並列または直列または直並列に接続したうえで、駆動装置の各相ごとに用意された出力から電力を供給することが行なわれている。巻線の並列接続時に直流抵抗、インダクタンスがアンバランスであれば、モータ回転により巻線に誘起する電圧による環電流が流れ、効率を悪化させる。
【解決手段】1巻線に対し1台の駆動装置を用意し、または各相の巻線をいくつかのグループに分けそのグループごとに1台の駆動装置を用意し、電力を供給するので、各相ごとにすべての巻線を直並列接続する場合に比べ駆動装置の出力電圧、電流はより小さくてすむことになる。したがって、この方式によれば、より大容量のモータを駆動することができる。 さらに、1巻線に対し1台の駆動出力を用意する場合は、巻線の直並列接続による電流アンバランス、電圧アンバランス、さらに前記環電流も発生しない。
(もっと読む)
センサレス同期電動機とその駆動方法及び装置
【課題】小型でも高効率な出力と安定な始動トルクが得られ、始動時や回転時にロータの回転位置を容易に検出でき、始動特性と回転時の制御性を向上できるセンサレス同期電動機とその駆動方法及び装置を提供する。
【解決手段】
ロータ3の構造において、一方の磁極をマグネット7としてロータ3表面に露出させ、これに隣接する他方の磁極をヨーク部8を形成する。マグネット7の露出により、回転力を発生させる磁束の有効利用が可能になり、隣接磁極がヨーク部8であることで、突極性も有し、小型化しても、高効率な出力と安定な始動トルクが得られ、加工も容易である。両者による駆動コイル6のインダクタンスの差が大きいので、これを表す検出電圧は、S/N比が良く、信号処理が容易で、高い検出精度が得られる。この検出電圧は、始動時にも回転時にも容易に検出でき、始動特性と回転時の制御性が向上する。
(もっと読む)
1 - 9 / 9
[ Back to top ]