
ラトックシステムエンジニアリング株式会社により出願された特許
1 - 5 / 5
特性定量方法
【課題】骨のようなネットワーク構造体の特性を定量する。
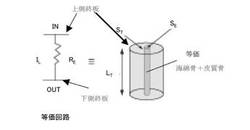
【解決手段】ネットワーク構造体を所定の大きさのメッシュに分割し、構造体が連続するメッシュの重心同士を接続することで、連結パスを形成する。そして、得られた連結パスについて、メッシュ毎に構造体の特性値に対応する電気抵抗値を割り当て、対応する電気回路を得、得られた電気回路の回路特性を調べることによって、ネットワーク構造体の特性を定量する。
(もっと読む)
椎体海綿骨の検査プログラムおよび検査方法

【課題】椎体の力学的性質を定量的に求める。
【解決手段】CTスキャンにより得られたCT画像から骨を抽出し、椎体海綿骨の骨梁1本ずつの長さおよび断面積を求める(S2)。求められた骨梁のネットワークに解析方向のネットワークを求め(S3)、求められたネットワークについて、電気回路網を対応させて、解析する(S4)。このようにして得た回路網の解析結果から、椎体の力学的性質を検出する(S5)。
(もっと読む)
撮像システム
【課題】X線、または、粒子線の強度分布を、高い空間分解能で検出すること。
【解決手段】X線、または、粒子線をシンチレター繊維束により、光電検出器で検出可能な光に変換し、シンチレター繊維束からの出力光を高品位の光電検出器に整合的に接続して、高品位の画像信号を得る。
(もっと読む)
X線検査装置
【課題】高精細なX線画像を得る。
【解決手段】X線源22、X線検出器20は、検体28のまわりを螺旋状にスキャン可能である。さらに、X線源22は波長を変更することができる。そこで、信号処理器34は、各種の条件のX線像を得ることができ、条件の異なった画像について除算や積分を行うことができる。そこで、コントラストを向上でき、半影補正器36では、検体との距離dが異なった画像から半影を除去することができる。
(もっと読む)
試料の内部構造検出装置およびその方法
【課題】試料中の微小散乱体の形状を検出する。
【解決手段】試料10にレーザ12を照射し、90度方向の散乱光をレンズ14で集光し検出器18によって散乱体像を検出する。ここで、散乱体の散乱振幅についての関数fと、レンズの結像関係と瞳関数を含む積分項である点応答関数hとのコンボリューション積分が検出器上の強度分布の平方根のフーリエ変換F{|g|}に等しいと近似し、このフーリエ変換である、F{|g|}〜F{f}F{h}(〜はニアリーイコールを示す)が成立するという前提とする。また、(1−F{f})N2〜ΣCk(Nθkxk+Nψkyk)2/2という式によって、瞳関数の外の波形情報を補い、逆フーリエ変換を可能とする。
(もっと読む)
1 - 5 / 5
[ Back to top ]