
プリマ インドゥストリー ソシエタ ペル アチオニにより出願された特許
1 - 4 / 4
レーザ加工処理の品質を監視する方法及びこれに対応するシステム
【課題】レーザ加工中にリアルタイムに、人間を介することなく加工品質を監視し、技術パラメータの修正を可能とする。
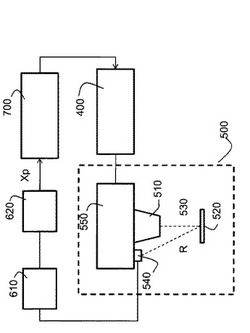
【解決手段】加工品質を表すパラメータを所定の加工品質を表す基準パラメータと比較して、1セットの調整された処理パラメータを取得し、加工処理500の欠陥の状態を含むそれぞれの状態を特定する複数の統計モデルθkを提供し、リアルタイムで獲得された1セットの処理観測に対してメンバーシップの認識の動作を実行する。1セットの処理観測は、加工処理500の状態を特定する複数の統計モデルθkの1又はそれ以上に対して、セットの正規化された処理パラメータを含む。認識の動作は、認識の動作で認識された状態の関数として、1又はそれ以上の原因の特定を含む。
(もっと読む)
冗長なアクチュエータを有するシステムの管理方法

【課題】
冗長な軸を持つ軌跡制御で、冗長性を最適に管理する方法を提供すること。
【解決手段】
第1のシステムの制御軸(X、Y)とこれと冗長な第2のシステムの制御軸(U、V)とを持つシステムで、総合システムの軌跡にフィルタリングを行い、第1のシステムの軌跡を生成する工程と、総合システムの軌跡と第1のシステムの軌跡との差分の軌跡である第2のシステムの第2の軌跡を計算する工程と、第1のシステムの駆動のために、第1のシステムの軌跡をサーボコントロールモジュールに入力する工程とを有する。
(もっと読む)
レーザ加工機
ここに、切断または溶接作業を行うレーザ加工機が記載され、そのレーザ加工機では、レーザヘッド(17)は、工作物(L)に対して2つの水平なデカルト座標軸(X,Y)に対して、比較的広い空間内で、比較的低い加速度を含む動きにより変位可能な移動部材(5)に保持される。レーザヘッド(17)は、移動部材(5)の上で、一対の水平なデカルト座標軸(u,v)に沿って、比較的限定された空間内で、高い速度および加速度で、それぞれバランスウエイト(21、22)が操作可能に結合する一対のスライド(11,12)によって変位させられる。  (もっと読む)
(もっと読む)
レーザ穴開け機
金属板(L)に穴(H)を開ける穴開け機は、一対のデカルト座標軸(X,Y)に沿って相対的に限定された空間内で高い速度および加速度で移動可能な一対のスライダ(6,7)により支持されたレーザカッティングヘッド(18)を含み、移動可能なバランス質量(14,15)が第1および第2のスライダ(6,7)に動作可能に結合する。  (もっと読む)
(もっと読む)
1 - 4 / 4
[ Back to top ]