
株式会社トヨタマックスにより出願された特許
1 - 5 / 5
補助装置
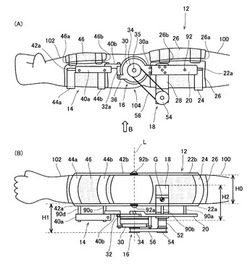
【課題】 身体に装着することが可能であり、使用時に使用者に違和感を与えることがない装着型パワーアシスト装置を提供する。
【解決手段】 アシスト装置10は、肘関節104の近位側身体である上腕100に装着する近位側装着部12と、肘関節104の遠位側身体である前腕102に装着する遠位側装着部14と、近位側装着部12と遠位側装着部14を夫々連結する連結機構部16と、モータ18等を備える。モータ18は肘関節104の回転軸Lからオフセットさせて上腕100の裏側に配置されている。これによりアシスト装置10の体側方向への張り出しを少なくできる。またモータ18の重心Gは上腕100の幅内に位置するように配置される。これにより上腕100を動かした際に、モータ18の自重によって肘関節104と上腕100にひねるようなモーメントが加わることを防止できる。よって使用時に使用者に違和感を与えることがない。
(もっと読む)
シミュレーション方法
【課題】事象モデルの高精度のリアルタイムシミュレーションを経済的に処理可能なシミュレーション方法を提供すること。
【解決手段】周期Tsごとに読み込まれるパルス信号の状態を入力変数とする方程式により定義されて所定の対象の動作を模擬する対象モデルの状態を演算に際して、パルス信号の前回の読み込み時点から前記パルス信号の状態が変化した時点までの時間T1と、変化後の前記パルス信号の状態とに基づいて、パルス信号の前回の読み込み時点から今回の読み込み時点までの期間におけるパルス信号の振幅平均値を算出し、この振幅平均値を今回の読み込み時点におけるパルス信号の振幅として採用する。このようにすれば、パルス信号を入力変数とする方程式により定義されるモデルの演算精度を、簡単な演算処理の追加により大幅に向上することができる。
(もっと読む)
シミュレーション方法及びシミュレーションプログラム

【課題】事象モデルの高精度のリアルタイムシミュレーションを経済的に処理可能なシミュレーション方法を提供すること。
【解決手段】目的とする事象のモデルを、周期的に変化する関数である所定の行列L(θ)の逆行列を含む方程式により定義し、このモデルの演算に際して、この逆行列に等しい行列λ(θ)を定義し、この行列λ(θ)の各項を演算することにより、行列L(θ)の逆行列の演算を置換する。これにより、逆行列の演算を行列λ(θ)の演算により代行することができるので、行列を含む対象モデルの演算の処理時間を短縮することができる。
(もっと読む)
インバータモデルの演算方法、インバータシミュレーション方法及びインバータシミュレーション装置
【課題】計算機資源を節約しつつ高速のリアルタイムシミュレーションが可能なインバータモデルの演算方法、インバータシミュレーション方法及びインバータシミュレーション装置を提供すること。
【解決手段】交流モータ駆動用の多相インバータの各相の制御信号であるPWM制御信号pwmと、多相インバータへの入力直流電圧Edと、多相インバータの各相の出力交流電圧Uとの間の数量関係を表す方程式により定義されるインバータモデルとして、それぞれ行列形式で定義された各相の出力交流電圧Uと、PWM制御信号pwmの行列とを変数とする行列方程式を採用し、この行列方程式に各相のPWM制御信号pwmの値と入力直流電圧Edの値とを代入することにより各相の出力交流電圧Uの行列項を演算する。このようにすれば、高速のインバータモデルを簡単な演算により実現することができる。
(もっと読む)
モータモデルの演算方法、モータシミュレーション方法、モータシミュレーション装置及びモータモデル演算プログラム
【課題】計算機資源を節約しつつ高速のリアルタイムシミュレーションが可能なモータモデルの演算方法、モータシミュレーション方法及びモータシミュレーション装置を提供すること。
【解決手段】回転角θを変数とする所定の関数であるインダクタンス行列L(θ)の逆行列を実質的に含む交流モータのモータモデルを用いるモータモデルを構築し、このモータモデルの演算に際して上記インダクタンス行列L(θ)の逆行列に等しい行列λ(θ)を演算して得た値を上記インダクタンス行列L(θ)の逆行列の値として用いる。これにより、演算処理を大幅に簡素化することができ、その結果として高速のリアルタイムシミュレーションのように限られた演算時間でもモータモデルを高精度に演算することができる。
(もっと読む)
1 - 5 / 5
[ Back to top ]