
高丸工業株式会社により出願された特許
1 - 5 / 5
ロボット教示システム
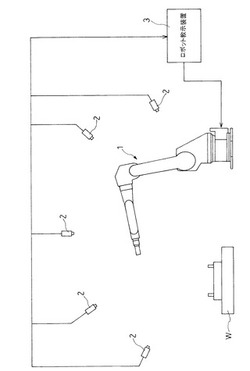
【課題】作業効率の向上化が図れ、なお且つ、危険も伴わないロボット教示システムを提供することを目的としている。
【解決手段】ワークWに対して溶接等の作業を行うロボット1と、前記ロボット1の作業現場を撮影可能な複数の多視点画像撮影カメラ2と、前記各多視点画像撮影カメラ2によって撮影された画像を取得し、且つ、その取得した画像から前記ロボット1の作業現場の任意視点画像を生成する画像生成手段と、前記生成された任意視点画像を表示する表示手段と、前記表示された画像を用いて前記ロボット1の作動を指示可能な指示手段と、前記指示手段によって指示された作動に応じて前記ロボット1を制御するロボット制御手段とを有してなる。
(もっと読む)
2軸ポジショナー

【課題】小型で汎用性のモータを使用することにより、コストを低く抑え、使用中にモータが壊れても、直ぐに新しい交換できるようにした2軸ポジショナーを提供する。
【解決手段】支持フレーム1の台枠3上に、テーブル回転用モータ5で垂直軸V回りに回転するワークテーブル4を支承し、支持架構6の左右竪枠8,8に、フレーム傾動用モータ9で水平軸H回りに回転する支持フレーム1を支承した2軸ポジショナーにおいて、テーブル回転用モータ5は、支持フレーム1に設けた複数のモータ5,5からなり、これらのモータ5,5の出力軸10,10に取り付けた駆動歯車11,11を、ワークテーブル4側の駆動用内歯車12に噛合し、フレーム傾動用モータ9は、支持架構6に設けた複数のモータ9,9からなり、これらのモータ9,9の出力軸15,15に取り付けた駆動歯車16,16を、支持フレーム1側の駆動用内歯車17に噛合する。
(もっと読む)
ピアスナット打ち込み装置及びピアスナット打ち込みロボットシステム
【課題】ナット接合作業における生産性の向上を図る。
【解決手段】ピアスナットの取り付け対象となる薄板材料をカシメるためのカシメ金型と、ピアスナット及び薄板材料を挟んでカシメ金型に対向配置される対向部材と、カシメ金型及び対向部材を保持するフレーム13と、カシメ金型と対向部材の少なくともいずれか一方を他方側に押圧する駆動源となるサーボモータ17と、サーボモータに対してカシメ金型と対向部材の押圧往復動作を設定ストロークで行う動作制御を行うコントローラを備えている。
(もっと読む)
溶接ロボットシステム
【課題】多関節のロボットアームを備えた汎用ロボットを使用しながら、アルミニウムなどの非鉄金属に対する抵抗溶接でも実用レベルで良好に行わせることができる、溶接ロボットシステムを提供する。
【解決手段】C形ガン9の相対向する一対の加圧電極チップ11,13がワークに当接した以降のチップ開閉駆動手段12による加圧行程において加圧力の増加に伴って移動する部位(出退移動体12a)の移動量を検出する移動量検出手段(パルスエンコーダー16)を併用し、ワークの溶接箇所を所定の圧力で加圧したときの前記移動量検出手段による検出移動量(パルス計数値16a)を各溶接箇所ごとに学習値として記憶させ、実働時には、各溶接箇所において、前記移動量検出手段による検出移動量と前記学習値との比較に基づいてチップ開閉駆動手段12を制御し、各溶接箇所を適正加圧力で加圧する。
(もっと読む)
スポット溶接用ロボットシステム
【課題】多関節汎用ロボットなどを利用して、高精度、高品質のスポット溶接の自動化を図る。
【解決手段】多関節汎用ロボット1などに取り付けられ且つスポット溶接用チップ11,13の開閉駆動源として電動式サーボモーター14を備えたスポット溶接用ガンユニット9と、ロボット制御装置17、溶接電流制御部29、及び主制御装置19を備え、この主制御装置19は、前記モーター14を制御するチップ駆動プログラム28と溶接電流制御部29を制御する溶接電流制御プログラム27、及びこれら両プログラム27,28に対して時間情報を与える両プログラム共通の1つのタイマー25を備え、スポット溶接用チップ11,13の開閉駆動とその間の溶接電流の制御とが共通の時間軸上で両プログラム27,28に従って実行される構成。
(もっと読む)
1 - 5 / 5
[ Back to top ]